
交流励磁接触器吸合动态过程的仿真研究
2011-06-09 10:14杜太行王进立孙小禄
电子设计工程 2011年23期
杜太行,王进立,孙小禄,李 娜,肖 娜
(河北工业大学 天津 300130)
随着工业自动化水平的进一步提高,对接触器产品的性能和寿命要求越来越高。交流接触器在接通电路时,动触头与静触头在达到稳定接触前会产生弹跳,不仅影响系统的性能而且产生的电弧对触头的烧蚀作用会降低接触器的电寿命,尤其是当接触器用在AC3使用类别下,闭合的起动电流达到6倍的额定电流。因而,研究交流接触器接通电路的整个动态过程,对于接触器的优化设计和提高整体性能具有重要的意义和实用价值。
文中利用接触器闭合过程的动态方程,通过LabVIEW软件可视化的图形编程语言和平台,以在计算机屏幕上建立图形化的软面板来替代常规的传统仪器面板建立了接触器模型,对接触器闭合动态过程进行了仿真分析;最后,基于建立的模型在不同线圈电压和不同合闸相角情况下,仿真分析了其线圈电流、励磁电压、电磁系统吸反力及线圈得电后铁心运动速度等因素,对接触器的设计研究具有非常重要的意义。
1 动态过程
1.1 动作原理
文中的研究对象为一额定电压为220 V,额定电流为100 A的交流接触器;线圈通电以后,电磁系统产生电磁吸力fx,当fx大于反力弹簧C1的反力f1时,动铁心和动触头开始运动。当动触头与静触头碰撞时,动触头的动能部分损失在触头形变及触头弹簧的能量吸收上,剩余部分的动能使动触头向相反方向运动。同时,动铁心继续向前运动。动触头的反方向运动和动铁心的向前运动,再加上主触头弹簧的预压缩弹簧力,均影响动触头的反向运动,动触头由碰撞后的反方向运动逐渐变为向前运动,再碰撞、再弹开,直到弹跳停止为止(所谓一次弹跳)。
和触头碰撞类似,在动铁心和静铁心的碰撞中,铁心形变和消振装置(消振垫片等)的作用消耗了动铁心的部分动能,剩余部分的动能驱动动铁心向相反方向运动。这时,当电磁吸力大于作用在铁心上的总反向力之和时,动静铁心不分离;当电磁吸力小于总反方向力之和时,动静铁心分离。当动触头反方向运动的位移大于主触头的超程时,已经闭合的主触头又重新打开,电弧燃烧(所谓二次弹跳)。
1.2 动态方程
当电磁线圈刚激磁时,产生的电磁吸力不足以超过动铁心所受的反力,在这段过程动铁心处于静止状态。随着电磁线圈电流以及磁链的增加,电磁吸力逐渐增加直至超过动铁心所受反力,此时动铁心开始运动。根据电压平衡方程以及达朗贝尔运动方程,此时交流接触器电磁机构吸合过程动态方程组应为:
2 模型分析及方法
一般来说,交流接触器吸合过程的动态特性包括交流接触器吸合过程的线圈电流—时间特性i=f(t)、电磁吸力—时间特性 Fx=f(t)、动铁心—位移时间特性 x=f(t)以及动铁心速度—时间特性v=f(t)。交流接触器吸合过程的动态特性的计算就是通过建立适当的吸合过程动态微分方程来求解吸合过程的动态特性。
接触器励磁线圈电压平衡方程为:

其中U为外加的励磁电压;R为励磁回路的电阻;ψ为磁链;i为励磁电流。ψ为气隙δ与电流i的函数,可以表示为公式:

K0、K1为常数,而 j(i)可以用公式(5)进行拟合。

其中A,B,C为拟合参数。拟合曲线为:

图1 拟合后的励磁电流特性曲线Fig.1 Curve of current characteristic after fitting

将公式(7)代入公式(2)可得

从公式(5)可以求得:
因为 F=K2ψ2,设接触器的反力为 P=P(δ),则铁心运动时的加速度表示为:
根据以上特性关系式建立接触器模型,LabVIEW后面板是程序框图结构,前面板是可视化界面可以清晰的观察到接触器闭合的动态状态,并且在界面上以特性曲线的方式表示出了线圈电流、铁心运动间距、铁心运动速度、励磁电压以及铁心运动时所受的反力等特性在接触器闭合的动态过程当中变化规律,对研究接触器的动态过程有很大的实用价值。
3 仿真分析及讨论
3.1 不同线圈电压下的仿真分析
国标14048.4-93中规定了,75%~110%的额定电压下,AC接触器的动作电磁铁应该能够可靠闭合。利用本文第2节中所述的方法,对接触器闭合的动态过程进行了仿真;当线圈电压为220 V的时候,接触器铁心及触头完全闭合瞬间及其特性曲线如图2所示。
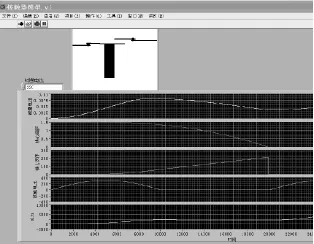
图2 闭合特性曲线Fig.2 Curve of closing characteristic
运行模型以后可以分析得出,随着电压从0 V开始逐渐增大,衔铁向下运动的趋势越来越明显;刚开始的时候衔铁和动触头不会有任何动作,当电压达到一定的值时衔铁开始运动并且有带动触头运动的趋势,但是衔铁与触头并不能完全闭合,动铁心在与静铁心接触以后会分开,这是因为线圈电压达不到额定电压造成接触器不能完全可靠的闭合。可以看到仿真结果如图3所示。
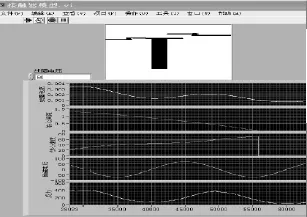
图3 电压为50 V时短暂闭合的情况Fig.3 Curve for 50 V voltage of closing characteristic
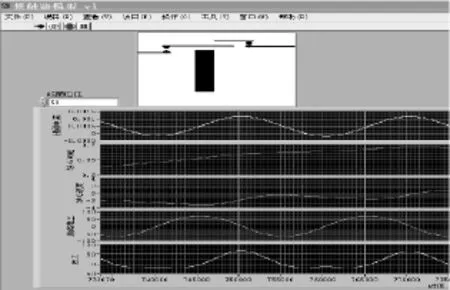
图4 电压为50 V时Fig.4 Cure for 50 V voltage of closing characterisitc
当线圈电压为50 V时,由图3和图4比较根据时间轴的显示可以看到,在50 ms时衔铁首先和静铁心接触并且带动动触头与静触头闭合,但是稍后的一段时间大约到70 ms以后它们就会分开并不能达到完全的闭合。比较图2和图3,当铁心间距与铁心速度为零的瞬间可以看出,线圈电压在220 V时接触器闭合的时间比线圈电压在50 V时闭合所需的时间远远要小,并且在220 V时接触器闭合后不会再分开能达到完全可靠的闭合状态。
由此从模型的仿真结果可以得出结论:随着电压的升高,接触器衔铁和触头的运动的状态随时在发生变化,衔铁运动的速度也越来越大,因此其闭合所需的时间也大大的减小;接触器在闭合的瞬间会产生触头弹跳的情况,吸力与反力合理的配合可以减弱触头弹跳,而且在吸反力配合的研究上,弄懂衔铁的运动状态及其特性变化是很重要的一方面,另外不同励磁电压与其施加方式对如何减小触头弹跳都有很大的研究价值。
3.2 合闸相角对闭合过程的影响
图5所示为线圈电压为220 V,接触器闭合时不同合闸相角所对应的时间轴曲线;第一个时间轴是合闸相角为30°时接触器从通电到闭合所需的时间,下面的时间轴是同等条件下合闸相角为120°时接触器闭合所需的时间。
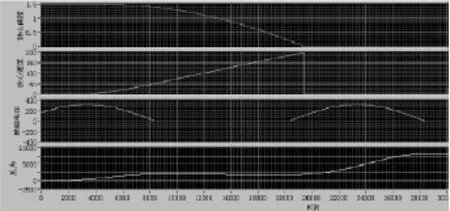
图5 不同合闸相角下的闭合情况Fig.5 Closing characterisitic of different closing phase
由图可见铁心速度与铁心间距为零瞬间时合闸相角为30°时触头闭合时间最短,只需约19.5 ms;合闸相角为120°时触头闭合时间最长,需要27.5 ms才能闭合,闭合时间相差了约 8ms。
4 结束语
文中以交流接触器的动态过程为研究重点,应用LabVIEW软件建立了接触器和电磁机构的模型,研究其动态过程的变化并且仿真分析了一系列动态过程中的参数,对研究接触器闭合过程的弹跳情况及智能化控制具有指导意义。
[1]刘颖异,陈德桂.一种新型智能接触器的动态特性及触头弹跳的仿真研究[C]//第十三届学术年会论文集,2007.
[2]许志红,张培铭.智能交流接触器全过程动态优化设计[J].中国电机工程学报,2005,25(17):159-164.XU Zhi-hong,ZHANG Pei-ming.Dynamic optimal design of intelligent AC contactor in the whole course[J].Proceedings of the CSEE,2005,25(17):159-164.
[3]郑鹏,张国钢,施磊,等.智能交流接触器动态仿真和实验研究[J].低压电器,2009(15):8-12.ZHENG Peng,ZHANG Guo-gang,SHI Lei, et al.Dynamic simulation and experiment study of intelligent AC contactor[J].Low-Voltage Apparatus,2009(15):8-12.
[4]许志红,张培铭.智能交流接触器动态吸合过程研究[J].中国电机工程学报,2007,27(18):108-113.XU Zhi-hong,ZHANG Pei-ming.Study on dynamic closing course for intelligent AC contactor[J].Proceedings of the CSEE,2007,27(18):108-113.
[5]纽春萍,陈德桂,李兴文,等.交流接触器触头弹跳的仿真及影响因素[J].电工技术学报,2007,22(10):85-91.NIU Chun-ping,CHEN De-gui,LI Xing-wen,et al.Simulation of contact bounce of AC contactor and study of its influence factors[J].Transactions of China Electrotechnical Society,2007,22(10)85-91.
[6]陈德桂.交流接触器通断过程的智能操作[J].低压电器,2000(4):1-5.CHEN De-gui.Intelligent operation in make and break process of AC contactors[J].Low-Voltage Apparatus,2000(4):1-5.
猜你喜欢
防爆电机(2021年3期)2021-07-21
电子制作(2019年7期)2019-04-25
微特电机(2019年2期)2019-02-25
电子制作(2018年1期)2018-04-04
中国环境监察(2017年8期)2017-10-23
电气开关(2016年6期)2016-08-11
西安工程大学学报(2016年2期)2016-06-05
电测与仪表(2016年6期)2016-04-11
电测与仪表(2016年18期)2016-04-11
电测与仪表(2014年15期)2014-04-04
