针对扇形应召搜索区的一种直升机协同搜潜方法及其效能仿真
2011-06-07 01:34:54丛红日沈培志孟祥超
电光与控制 2011年12期
丛红日,沈培志, 孟祥超
(海军航空工程学院,a.指挥系;b.基础部,山东 烟台 264001)
0 引言
反潜直升机由于具有反应迅速、速度快、机动灵活的战术特点,是遂行应召反潜作战任务的理想兵力。其中,应召搜索是应召反潜的基础,也是应召反潜的难点所在[1]。
应召搜索属于二次搜索,由于已经有了目标潜艇的踪迹,成功搜索具有了比其他战斗活动方法更有利的条件,因此,应采取各种措施努力提高搜索效能,以便为后续的攻击行动提供基础。为此,应通过研究找到好的作战使用方法,为应召搜索提供理论指导。
扇形搜索区是应召搜索时的一种常用的搜索区[2]。这里就结合扇形应召搜索区的特点提出一种协同搜索方法并通过建立仿真模型对其搜索效能进行仿真研究。
1 一种扇形搜索区应召搜索方法
在应召搜索时,搜索区确定的是否合理对搜索效能有重要影响,应根据已知条件和延迟时间,使用应召搜索区模型科学地确定出应召搜索区[2]。
应召搜索区一般为圆形和扇形两种。其中,扇形应召搜索区具有更大的优越性[2],当条件许可时,应尽可能采用扇形应召搜索区。
应召搜索比较复杂也很困难,所以应尽可能进行协同搜索。部分文献中提出了使用吊放声纳与声纳浮标在应召搜潜中联合运用的问题,但只进行了初步分析,没有给出具体的作战使用方法[3]。
针对扇形应召搜索区的特点,借鉴部队训练经验和反潜直升机应召搜索作战使用方法的研究成果,这里提出一种协同搜索方法,即“前堵后追法”。
根据参与协同搜索的反潜直升机的数量,“前堵后追法”可区分为双机“前堵后追法”和多机“前堵后追法”。其中,双机“前堵后追法”最为典型,也最为常用。
“前堵后追法”中的“前堵”,是指一架反潜直升机使用声纳浮标在所确定的应召搜索区的远界通过布设弧形拦截浮标阵建立拦截巡逻线,在目标潜艇航向的前方对目标潜艇进行堵截。“前堵后追法”中的“后追”,是指另一架反潜直升机从所确定的应召搜索区的近界开始,沿所判断的目标潜艇航向(也就是所确定的扇形搜索区的轴向)使用吊放声纳依次悬停探测,从目标潜艇后面对目标潜艇进行追击式搜索。其基本搜索方法如图1所示。显然,这是一种典型的区域协同,但也要求进行时间协同。

图1 “前堵后追法”示意图Fig.1 Sketch map of“frontally intercepting and chasing from behind”
如果所确定的扇形应召搜索区面积较大,则需要多机协同搜索。多机“前堵后追法”是在双机“前堵后追法”的基础上变化而成,即不局限于一架反潜直升机参与“前堵”或“后追”,一般是在兵力较充足的情况下对面积较大的扇形应召搜索区进行搜索时采用。至于具体方法,则需要根据参与搜索的反潜直升机的数量和扇形搜索区的不同形状(如狭长形、扁平形等)进行具体分析。
2 搜索效能仿真模型建立
2.1 搜索机理分析
只有当敌潜艇进入了声纳(声纳浮标或吊放声纳)的有效搜索区域时,才有可能搜索到敌潜艇。但即使敌潜艇进入了声纳的有效搜索区域,搜索能否成功,还要取决于能否被监听到。因此,搜索概率P搜索取决于敌潜艇进入声纳有效搜索区域的概率P进入和能够被监听到的概率P监听,因此

其中,P监听主要取决于装备性能和声纳员的训练水平。下面主要讨论P进入。
由于同时使用声纳浮标和吊放声纳进行协同搜索,因此,敌潜艇无论是进入了“前堵”的声纳浮标阵的有效搜索区域还是进入了“后追”的吊放声纳的有效搜索区域,都是进入了声纳有效搜索区域。
因此,仿真的基本方法为:从开始搜索时起,依次计算每一时刻敌潜艇的位置是否进入了声纳浮标阵或吊放声纳的有效搜索区域。
1)吊放声纳搜索。
使用吊放声纳搜索时,需要不断转移探测点。也就是说,不但敌潜艇处于运动中,随着探测点的转移,吊放声纳的有效搜索区域也在变动。由于使用吊放声纳搜索时具有明显的周期性,因此,只需要分析一个探测周期的情况即可[4]。
而在每一个探测点,在由 t收放、t监听、t转移所组成的探测周期内,只有t监听属于有效工作时间,如图2所示。

图2 直升机使用吊放声纳探测的有效探测时间示意图Fig.2 Efficacious searching time in submarine searching with dipping sonar
因此,只有在t监听这段时间内,吊放声纳的有效搜索区域才存在。吊放声纳的有效搜索区域可以映射为以吊放声纳当前悬停探测点为圆心,以吊放声纳有效探测半径D吊声为半径的圆形区域,因此,只要计算出当前时刻敌潜艇与吊放声纳当前探测点之间的距离d潜吊,则:当 d潜吊≤D吊声时,敌潜艇进入了吊放声纳当前点的有效搜索区域;否则,敌潜艇就没有进入吊放声纳当前点的有效搜索区域[5]。
2)声纳浮标搜索。
由于声纳浮标阵由若干声纳浮标组成,而各个声纳浮标的工作是相互独立的[6],因此,只要敌潜艇进入了其中任意一个声纳浮标的有效探测范围,就可以判定敌潜艇进入了声纳浮标阵的有效搜索范围[7]。因此,需要把敌潜艇的当前位置与声纳浮标阵内的每一个声纳浮标的有效探测范围进行比对。
任意一个声纳浮标的有效搜索区域都可以映射为以该声纳浮标位置为圆心,以声纳浮标有效探测半径D浮声为半径的圆形区域,因此,在任意时刻,需要依次计算出敌潜艇与每枚声纳浮标之间的距离d浮吊n,则:当 d潜吊1≤D浮声∪d潜吊2≤D浮声∪…∪d潜吊n≤D浮声时,敌潜艇进入了声纳浮标阵的有效搜索区域。
设敌潜艇的起始位置点为A,当前时刻的位置点为B,则线段AB为敌潜艇的航行轨迹。设任意一个声纳浮标位于O点,其有效探测距离为D浮声。设O点与线段AB之间的距离为d,且垂足为C。则可以区分为以下3种情况。
① d≤D浮声,且C位于AB上。
如图3所示。显然,敌潜艇的航行轨迹经过了该声纳浮标的有效探测范围。
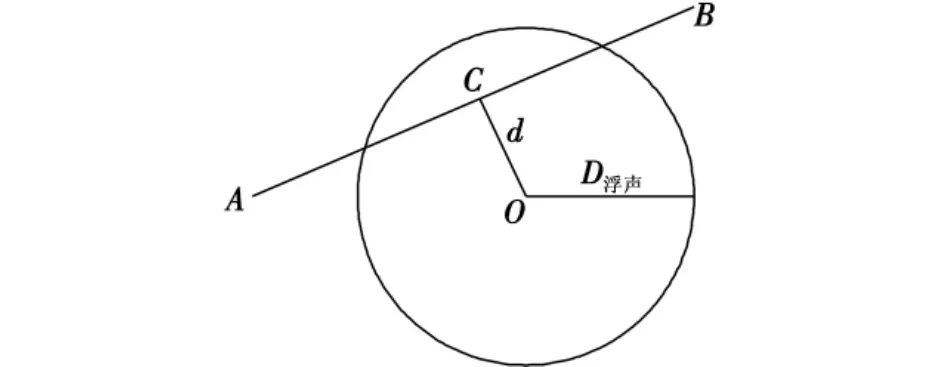
图3 敌潜艇航行轨迹经过该声纳浮标有效探测范围示意图Fig.3 When the sailling track of submarine passes the efficacious searching area of a sonobuoy
② d≤D浮声,但C不位于AB上。
如图4所示。在当前时刻,敌潜艇的航行轨迹还没有进入到该声纳浮标的有效探测范围。延长监听时间,则敌潜艇在将来某一时刻会进入到该声纳浮标的有效探测范围。

图4 敌潜艇航行轨迹目前没有进入该声纳浮标有效探测范围示意图Fig.4 When the sailling track of submarine has not passed the efficacious searching area of a sonobuoy up to yet
③ d>D浮声。
如图5所示。显然,敌潜艇的航行轨迹不可能进入该声纳浮标的有效探测范围。
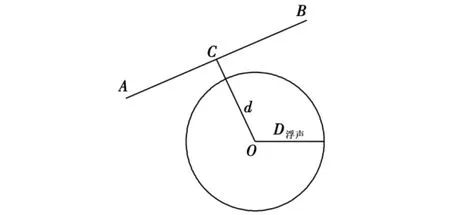
图5 敌潜艇航行轨迹不经过该声纳浮标有效探测范围示意图Fig.5 When the sailling track of submarine can not pass the efficacious searching area of a sonobuoy
2.2 敌潜艇分布及其表示
1)敌潜艇位置的初始散布。
发现敌潜艇的兵力所报告的敌潜艇的位置,通常都会存在一定误差。这一误差一般包含在所报告的信息中,如果在所报告的信息中没有包含位置误差,则也可以根据经验做出合理估计。
不考虑敌潜艇的潜深,敌潜艇初始位置分布于一个二维空间。设所报告的敌潜艇的位置坐标为(x'潜0,y'潜0),敌潜艇的实际位置坐标为(x潜0,y潜0),敌潜艇的位置误差为σ位置,则根据误差理论,敌潜艇的位置散布服从正态分布。使用两个相互独立的随机数来产生敌潜艇的实际位置。设随机数ξ1和ξ2相互独立,且均服从以0为均值、以σ位置为均方差的正态分布,则:

2)敌潜艇航向散布。
设所报告的目标潜艇航向为θ'潜,该方向即为扇形搜索区的搜索轴向,目标潜艇航向误差为σ航向,一般认为,在搜索区为扇形时,目标潜艇的航向分布服从正态分布。使用随机数来生成目标潜艇的实际航向θ潜,设ξ3为服从以0为均值、以σ航向为均方差的正态分布的随机数,则:

3)敌潜艇运动方程。
设敌潜艇在任意时刻的位置坐标为(x潜,y潜),敌潜艇的航速为v潜,则当敌潜艇不中途改变运动状态时,其运动方程为

使用上述运动方程,就可以计算出任意时刻敌潜艇位置的坐标。
2.3 仿真程序
仿真程序框图如图6所示。
图中:t、T分别表示当前搜索时间和最大搜索时间;n、N分别表示当前仿真次数和最大仿真次数。
仿真程序使用C++语言编程实现。
3 仿真研究
3.1 仿真想定
1)基本想定。
扇形应召搜索区域的远界R远界=××km(为使用吊放声纳搜索时应用文献[2]中的应召搜索区模型计算得出),扇面角θ扇面=××。
目标潜艇为常规动力潜艇,其航速v潜=××kn,报告航向θ'潜=××,敌潜艇的初始位置误差σ位置=××m,敌潜艇的航向误差σ航向=××。在搜索过程中,目标潜艇不中途改变航行状态。
参与搜索的反潜直升机的数量最多为两架,反潜直升机为××型。每架反潜直升机在同一时刻到达起始搜索位置开始搜索。
声纳浮标型号为××型,其已经考虑了作战环境等影响的实际有效探测距离D浮声=××km。声纳浮标之间的间距d浮声为D浮声的1.5倍。组成声纳浮标阵的声纳浮标的数量设定为××枚,并沿扇形搜索区远界内侧均匀布设。采用先布设后监听的搜索方法。
吊放声纳型号为××型,其已经考虑了作战环境等影响的实际有效探测距离D吊声=××km。悬停探测点间距d探测点为D吊声的1.3倍。在每个悬停探测点的监听时间t监听=××min,收放吊放声纳的时间t收放=××min。反潜直升机转移悬停探测点时的飞行速度v转移=× × km/h。
仿真次数为10000次。
2)搜索方案。
为了便于进行对比研究,共设定5种搜索方案,其中3种为双机搜索方案,两种为单机搜索方案。分别如下。
基本搜索方案:双机“前堵后追”搜索方案。一架反潜直升机使用声纳浮标在应召搜索区远界处沿远界内侧布设弧形声纳浮标阵进行“前堵”式搜索;另一架反潜直升机使用吊放声纳从报告位置点开始采用扇形搜索方法进行“后追”式搜索。
对照方案一:双机声纳浮标搜索方案。两架反潜直升机均使用声纳浮标进行搜索,一架反潜直升机沿应召搜索区远界内侧布设弧形声纳浮标阵进行搜索;另一架反潜直升机沿应召搜索区远界与报告位置点的中线布设弧形声纳浮标阵进行搜索。
对照方案二:双机吊放声纳搜索方案。两架反潜直升机均使用吊放声纳进行搜索,一架反潜直升机从报告位置点开始采用扇形搜索方法进行搜索;另一架反潜直升机沿相反的搜索路径进行搜索。
对照方案三:单机声纳浮标搜索方案。一架反潜直升机沿应召搜索区远界内侧布设弧形声纳浮标阵进行搜索。
对照方案四:单机吊放声纳搜索方案。一架反潜直升机从报告位置点开始采用扇形搜索方法进行搜索。
各种搜索方案的最大搜索时间相同,T=t搜索=2 h。
为了更好地进行对比研究,在其他条件不变的情况下,还可延长最大搜索时间至T=t搜索=4 h,但需要说明的是,由于反潜直升机的留空时间的限制,这种情况下需要进行接力式搜索,此时各方案的内涵就发生了一定变化。而且如果T=4 h,则使用应召搜索区模型所计算出的扇形应召搜索区的R远界也会发生变化,但这里假设R远界不变。
3.2 仿真结果
仿真结果见表1。

表1 不同搜索方案搜索效能仿真结果表Table 1 Simulation result of searching efficiency of different searching schemes
3.3 仿真结果分析
从仿真结果可以看出如下几点。
1)“前堵后追”法的搜索效果比较理想。
“前堵后追”法的搜索效能比与之对照的其他搜索方案的搜索效能都好。采用“前堵后追”法进行搜索,能取得比较理想的搜索效果。
2)应召搜索区确定得是否合理对应召搜索效能有重大影响,需要根据所使用的搜索设备计算R远界。
当T=2 h时,对照方案一和对照方案三的搜索效能不够理想,特别是对照方案三的搜索效能非常不理想,这主要是由于R远界确定是基于使用吊放声纳搜索时,应用应召搜索区模型计算得出的结果,不适用于使用声纳浮标搜索的情况,如果使用声纳浮标进行搜索,需要应用应召搜索区模型重新计算相应的R远界。
3)延长搜索时间能够提高搜索效能。
延长搜索时间至T=4 h后,对照方案一和对照方案三的搜索效能都有明显提高,特别是对照方案三的搜索效能有很大提高。这主要是因为声纳浮标阵的搜索效能与监听时间密切相关[8]。而基本方案、对照方案二、对照方案四的搜索效能也随搜索时间的延长而提高,但提高幅度比较小。这说明,使用应召搜索区模型所计算出的R远界是最小(对应计算时所使用的搜索设备而言)的R远界,当R远界确定后,通过延长搜索时间能够在一定程度上提高搜索效能。
4 仿真研究
本文提出了当应召搜索区为扇形搜索区时的一种反潜直升机协同搜索方法,即“前堵后追”法,并通过建立基于蒙特卡罗法的搜索效能仿真模型,对该搜索方法的搜索效能进行了仿真。仿真结果表明,该搜索方法的搜索效能比较理想。
需要说明的是,本文所建立的仿真模型基本没有考虑作战海区水文气象条件的影响,而且模型中一些参数(如敌潜艇航速等)很难准确确定,需要作必要的假设,这在一定程度上影响了结果的可靠性,需要在今后的研究工作中进一步加以完善。
[1]孙明太.航空反潜战术[M].北京:军事科学出版社,2003:86-99.
[2]丛红日,王宗杰,沈培志.反潜直升机应召搜索区模型研究[J].舰船电子工程,2010,30(9):48-50.
[3]张晓利,陈建勇.吊放声纳与声纳浮标在应召搜潜中的联合运用[J].海军航空工程学院学报,2006,21(6):669-671.
[4]吴芳,杨日杰,徐俊艳.对潜的吊放声纳应召搜索技术仿真研究[J].系统仿真学报,2009,21(13):3989-3992.
[5]盛文平,王磊,王浩,等.反潜直升机吊放声纳应召搜潜仿真研究[J].指挥控制与仿真,2009,31(6):84-88.
[6]孙辉,孙明太,刘京莲.被动全向浮标HYFIX定位精度仿真分析[J].电光与控制,2010,17(1):85-88.
[7]杨日杰,王正红,周旭,等.浮标阵型对搜索效能影响的研究[J].计算机仿真,2009,26(12):16-20.
[8]丛红日.声纳浮标阵搜潜效能通用仿真模型研究[J].系统仿真技术,2010,6(2):104-109.
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
电子测试(2018年14期)2018-09-26 06:04:12