基于重力异常的水下潜艇避障方法研究*
2011-06-07 00:41蔡华杰
舰船电子工程 2011年12期
蔡华杰
(中国舰船研究设计中心 武汉 430064)
一般来说,探测目标相对于周围介质(空气或海水)来说存在密度异常。重力学中的反演问题定义为:由实测重力异常Δg及其导数的数值大小、空间分布和变换规律,定性和定量推断客观存在的异常地质结构、构造和地质体的形状、产状及剩余密度分布。因此,基于重力梯度的目标探测技术,是将探测目标视为异常地质体,将基于重力梯度的目标探测问题转换为重力梯度异常的反演问题。
由实测重力异常Δg及其导数的数值大小、空间分布和变换规律,定性和定量推断客观存在的异常地质结构、构造和地质体的形状、产状及剩余密度分布。可用公式表述如下:
任意形态物体所引起的重力异常Δg(x,y)表达式可写为:
由此,反演问题可转换为一个数学问题:由观测面上重力异常Δg(x,y)及其导数的分布,在给定约束(如设物体密度均匀,形态规则)条件下,反演物体的密度参数和几何参数。
定义坐标系如下:把海平面当成水平面,置x轴和y轴于此平面内,使z轴的方向垂直向上。设x、y、z为重力梯度仪在三个坐标轴上的坐标,ε、η、ζ为第i个物质单元的坐标,δi表示第i个物质单元的密度。则由某个不明障碍物体所引起的重力梯度异常的计算公式如下:
1 引言
利用多种传感器探测和感知战场环境是舰船作战系统的最重要组成部分之一。对海军各型潜艇来说,及时探测并规避不明障碍物不仅可以有效确保其安全和隐蔽,更是其顺利完成作战任务的保障手段。据统计,20世纪以来,国外潜艇发生了近500起非战时海损事故,导致84艘潜艇沉没大海,其中核潜艇7艘。在这些事故中,碰撞沉没事故占20%以上,这其中有上浮时与水面舰艇之间的相撞,水下潜艇之间的相撞,也有潜艇触礁事件。此外,由于搁浅、触底而造成破损或沉没的事故也常有发生。2005年,美国海军“旧金山”号核潜艇,在关岛基地东南方猛撞了海图中没有标注的、深度为152.4m的海底山峰,舰体严重受损,险遭沉没[1]。
以上潜艇事故的原因有三个方面:操作失误、地貌不清、设备故障。由于现有的探测手段并不完善,而潜艇上所载的海图,有些测量的年份已经久远,由于海底火山活动、珊瑚生长、河口泥沙沉积,海底的浅点会有所变化,海图也并不是完全可靠。因此,对于长期在水下航行的潜艇来说,需要一种实时、精确的探测避障技术,来对海底山峰、其他潜艇或舰船等不明障碍物进行规避,以保证潜艇在水下航行的安全[2]。
从20世纪70年代以来,新型的重力梯度仪和全张量重力梯度测量技术在国外开始得到重视和发展,在海洋勘探及目标探测领域开始得到应用,并表现出良好的前景,目前我国也在大力发展重力梯度技术[3~5]。由于万有引力的作用,海底山峰等障碍物会产生重力异常,本文提出的基于重力异常的潜艇避障方法,根据艇载重力梯度仪探测的重力异常,可推算障碍物的大致信息,由此为潜艇的规避提供参考。这种探测障碍物的方式不向外辐射信号,保证了潜艇的隐蔽性,是一种值得关注和研究的新方法。
2 基于重力异常的避障基本原理
2.1 基于重力异常的障碍物探测
一般来说,探测目标相对于周围介质(空气或海水)来说存在密度异常。重力学中的反演问题定义为:由实测重力异常Δg及其导数的数值大小、空间分布和变换规律,定性和定量推断客观存在的异常地质结构、构造和地质体的形状、产状及剩余密度分布。因此,基于重力梯度的目标探测技术,是将探测目标视为异常地质体,将基于重力梯度的目标探测问题转换为重力梯度异常的反演问题。
由实测重力异常Δg及其导数的数值大小、空间分布和变换规律,定性和定量推断客观存在的异常地质结构、构造和地质体的形状、产状及剩余密度分布。可用公式表述如下:
任意形态物体所引起的重力异常Δg(x,y)表达式可写为:
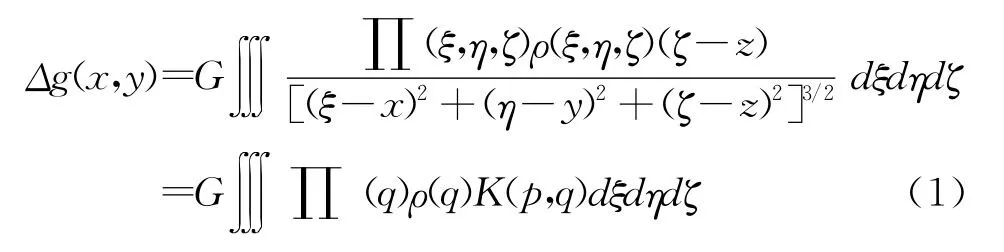
其中:∏(ξ,η,ζ)为物体的形态函数,由物体边界确定,也可称物体边界位置函数,该函数在物体内值为1,在物体外值为0,呈阶梯状;ρ(ξ,η,ζ)为物体密度分布函数;它们共同确定了物体状态。G为万有引力常量。
由此,反演问题可转换为一个数学问题:由观测面上重力异常Δg(x,y)及其导数的分布,在给定约束(如设物体密度均匀,形态规则)条件下,反演物体的密度参数和几何参数。
2.2 重力异常反演
定义坐标系如下:把海平面当成水平面,置x轴和y轴于此平面内,使z轴的方向垂直向上。设x、y、z为重力梯度仪在三个坐标轴上的坐标,ε、η、ζ为第i个物质单元的坐标,δi表示第i个物质单元的密度。则由某个不明障碍物体所引起的重力梯度异常的计算公式如下:



如果目标物体的距离远大于目标本身大小,则以上公式经过近似和推导可得:
由式中前两项可以推测目标物体的方位角,在预估物体质量的基础上,可根据第三项推测目标物体的距离。
3 仿真实验
潜艇在水下航行时,通过艇载全张量重力梯度仪连续测量各个方向上的重力信息,由于万有引力的存在,当具有一定质量的目标靠近时,重力梯度仪会测量到和目标质量、相对位置有关的重力异常变化。我们将障碍物假设成一个质点,考虑如图1所示的两种情况:(a)潜艇航迹直接指向障碍物;(b)潜艇航迹经过障碍物附近但不与障碍物接触。潜艇沿着航迹前进时,艇载重力梯度仪实时探测障碍物所引起的重力梯度异常,这两种航迹上的重力梯度异常如图2所示。

图1 潜艇航迹与障碍物的空间位置关系
根据重力梯度的变化曲线,我们可以大致推测障碍物与潜艇航迹之间的相对位置关系。
假定障碍物处于静止状态,潜艇在航行中连续测量重力梯度异常,代入式(8),则可以实时计算障碍物的方位,经过多次测量和障碍物质量估计,就可以进一步确定障碍物的位置。如图3所示,“潜艇航迹”、“障碍物位置”及“反演障碍物方位”分别表示在图中。

图2 重力梯度变化曲线

图3 反演障碍物位置示意图
4 结语
在我国大力发展重力梯度传感器及测量技术的环境下,本文对重力异常和重力梯度在舰船方面的应用进行了预先研究,提出了一种通过重力异常反演去探测障碍物大致信息的水下潜艇避障方法,该方法借鉴了地球科学领域的重力异常测量和补偿理论和技术,创造性地运用于舰船作战系统和水下探测感知领域,促进了学科融合,具有重要的理论和实用价值。
[1]孙晔飞,聂其武.从美核潜艇触礁看非战时潜艇事故原因[J].环球军事,2005(8):53~58
[2]海鹰.美军核潜艇关岛触礁内幕[J].舰载武器,2005(3):17~21
[3]边少锋,纪兵.重力梯度仪的发展及其应用[J].地球物理学进展,2006,21(2):660~664
[4]Lin Wu,Jinwen Tian.Automated Gravity Gradient Tensor Inversion for Underwater Object Detection[J].Journal of Geophysics and Engineering,2010,7(4):410~416
[5]Lin Wu,Xin Tian,Jie Ma,et al.Underwater Object Detection Based on Gravity Gradient[J].IEEE Geoscience and Remote Sensing Letters,2009,7(2):362~265
猜你喜欢
中等数学(2022年5期)2022-08-29
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
中等数学(2020年2期)2020-08-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
青年歌声(2019年12期)2019-12-17
创新作文(1-2年级)(2019年4期)2019-10-15
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16