基于原子动作的BML动作语义标注方法研究*
2011-06-06 10:07:04鲍广宇
舰船电子工程 2011年12期
朱 立 鲍广宇
(解放军理工大学指挥自动化学院指挥自动化系 南京 210007)
1 引言
作战管理语言(Battle Management Language,BML)是一种无歧义的语言,用于指挥控制部队与装备遂行军事行动,提供态势感知和一种共享的公共作战场景[1]。它由美军于1998年首先提出,力求形成一套语言规范,消除“自由文本(free text)”在表达指挥员意图和描绘战场态势时的歧义现象,提高真实指控系统和仿真系统之间的互操作能力。
国内外在作战管理语言的语法层面上已进行了一定的研究[2~4],形成了一些语法表示方法,然而语法格式仅仅提供了作战命令规范化表达的结构框架,仿真模型无法从这种结构框架中获得充足的语义信息来理解所要执行的操作。因此,必须对这种结构化的文书进行语义标注,而动作语义标注是标注作战命令的核心,是仿真模型理解作战命令的关键。
论文将提出动作映射、原子动作标签的概念,设计一种基于原子动作的动作语义标注方法,实现对作战命令的语义标注。
2 BML体系结构
为使BML提供指控与仿真系统各个层次的互操作支持,必须从条令视图、表示视图、协议视图、语法视图和本体视图等五个方面来描述[5]。如图1。

图1 BML体系结构
条令视图是对作战管理领域术语的文档形式的严格定义。这些术语以5W(Who,What,Where,When,Why)进行分类构成术语表,其中Who类定义的是作战单位,如坦克营等;What类定义的是作战行动或作战任务,如攻击等;Where类定义的是位置,如地理坐标;When类定义的是时间;Why类定义作战行动的目的。
表示视图是描述实体间关系、实体属性及属性的可能取值的数据模型。该数据模型对条例视图的术语进行组织,使之能够描述可执行的任务。表示视图不仅要能够描述各种不同的任务,还要能够将这些任务进行组合排列以形成作战意图[6]。
协议视图是BML支持的接口及其访问规范。协议保证BML能够在指控和仿真系统间自由地交换信息。目前国际上采用XML来描述BML信息交换需求,XML的简单、自定义、易于理解、可扩展性等优点,使其在作战指挥、仿真系统中成为数据描述的唯一事实标准。
语法视图是将无歧义术语进行组合,生成语法上有效的语句的规则。BML表示视图的数据模型本身隐含了数据项之间的关系,而语法规则能够把这些关系显式化,将术语组装成有意义的通信信息。BML采用上下文无关语法,方便计算机自动处理。
本体视图是对作战管理领域概念化的形式化规范说明。它是条令视图中术语的形式化的概念抽象,描述了作战管理领域的基本概念以及它们之间的关系[8]。BML本体能够使所有术语被清楚理解,处理数据的语义信息。
3 基于BNF的BML语法表示
BNF是一种表示上下文无关语法的元语言[7],它能够精确的表述语法结构,是形式化定义BML语法的一种理想选择。
经过对大量作战命令分析发现,作战命令主要由一些固定的元素组成,如执行对象、时间等,将这些公共元素定义为公共信息组件,这些组件可归纳为Who(作战行动涉及的对象),What(采取的行动),When(行动时间),Where(行动地点)和 Why(执行行动的目的),即5W。
根据这个特点,我们采用BNF将命令表示为如下形式:

各组件含义如表1。
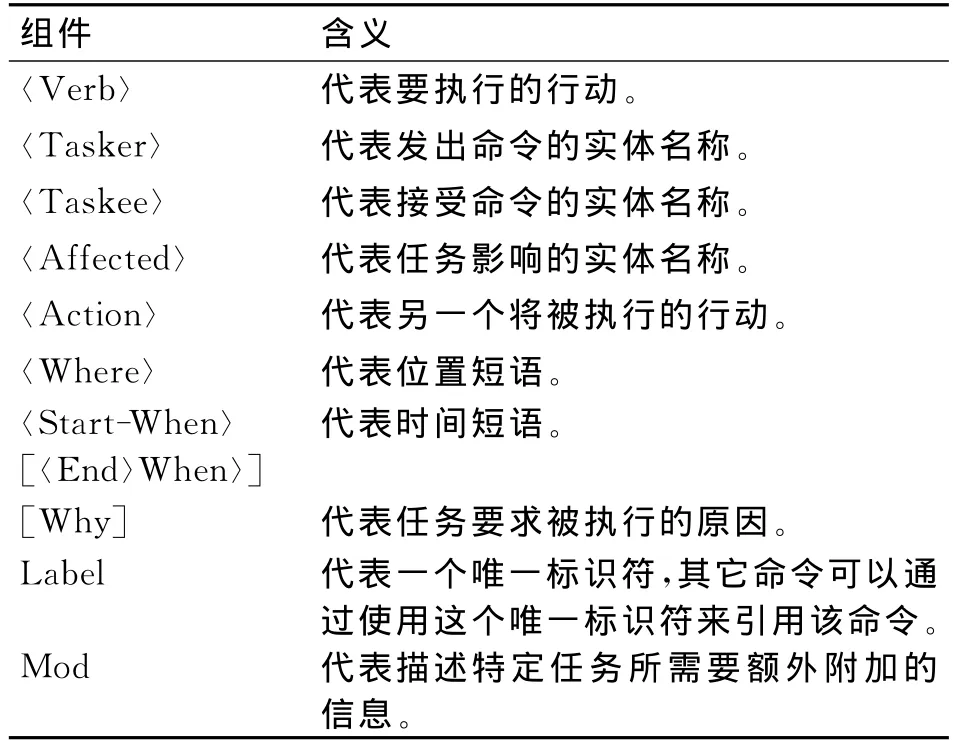
表1 语法组件及含义
例如,某战例中师指挥部向步兵团下达命令:“20XX年3月16日18点00分00秒出发,埋伏在(XXo28′.0N,XXo08′.23E)以阻止敌突击队渗透。”
形式化表示如下:
〈埋伏〉〈师指挥部〉〈步兵团〉〈开始〉〈不晚于〉〈20XX年3月16日18点00分00秒〉〈在〉〈XXo28′.0N,XXo08′.23E〉〉为了〉〈阻止〉〈引用_1〉。
4 基于原子动作的动作语义标注
语义标注即给词语加上语义类别标签[9]。通过语义标注将形式化命令中包含的实例映射到本体中的相应概念,从而实现仿真模型能够理解作战命令,执行相应的动作。
在一条作战命令中,核心组件是描述动作的词,它指示了仿真对象需要执行的动作,直接影响一条命令的作用效果,对于基于BNF表示的作战命令,〈Verb〉即是其核心组件,因此,对〈Verb〉进行精确标注是仿真模型理解作战命令的关键。传统的标注方法是在本体库中搜索其上位词[9],如“前进”的上位词是“移动”等,通过这种方法标注会产生以下问题:
1)从本体中得到的上位词,动作的抽象程度过高,对于仿真模型要执行何种动作的说明不够清晰。
2)一旦对本体进行修改或是加入新的动作,已有的仿真模型无法对更新的动作进行相应的响应,必须对已有的仿真模型进行修改才能满足新的规则。
为解决上述问题,本文提出一种基于原子动作的标注方法,标注出仿真模型能够直接执行的动作序列,动作序列是对命令动作在执行层面上的说明,使仿真对象能够明确所要执行的动作,通过这组原子动作的有序执行实现对命令动作的执行。
4.1 动作映射
定义1 动作映射

其中,Vo表示军事本体[10]中定义的全体动作有限集合,v表示本体定义的某个动作,VT表示仿真系统中全部原子动作的有限集合,原子动作指仿真模型能够直接执行的基本动作,vTi表示某个原子动作。
动作映射fT(v)将本体中定义的动作概念v映射为仿真系统的原子动作序列,使得仿真模型能够直接执行。
4.2 原子动作标签
定义2 定义五元组〈s,vT,o,p,t〉为原子动作标签,其中s表示动作的实施者;vT表示仿真系统的原子动作;o表示动作的接受者,若无作用对象,则为NULL;p是参数,如地理坐标和数值的有序对;t是时间,如动作开始和结束时间戳的有序对。例如:
〈坦克 1 营,平 移,NULL,(116.823,37.652),(14:28,NULL)〉
表示在某仿真系统中,“坦克1营”模型执行原子动作“平移”,到达地点(116.823,37.652),该“平移”动作发生时间为“14:28”。
原子动作标签指定了仿真模型要执行的动作以及执行这项动作所需的部分参数,这些参数是命令中包含的信息的体现,执行该动作的其他参数来自仿真模型自身的属性和系统配置,仿真模型执行动作标签的动作时,先要进行合法性检查,看是否和模型自身属性有冲突,例如,某标签要求的模型移动速度大于模型自身速度上限,则模型会反馈告警信息,提示参数不合法,无法执行。当动作标签和模型属性提供了同类参数时,优先选取标签提供的参数作为动作参数。
4.3 动作语义标注
动作语义标注方法如图2所示。
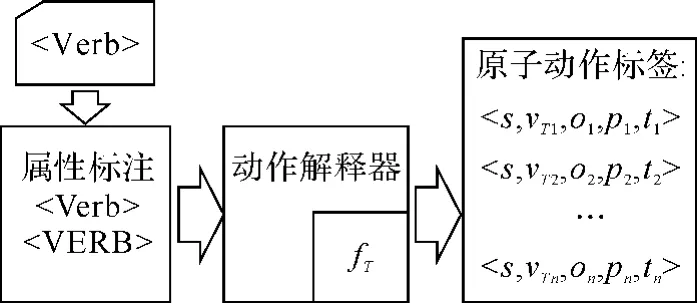
图2 动作语义标注过程
形式化命令中的〈Verb〉组件,经过属性标注在本体中找到对应动作的属性,动作解释器通过动作映射fT(v)将命令动作对应的本体中的概念解释成一组原子动作序列,解释器还负责将原子动作序列和形式化命令中的其他组件组合,最终生成一组原子动作标签序列,标签中的vTi是原子动作,这些基本动作的执行参数包含在标签中。仿真模型通过原子动作序列来“理解”命令中包含的动作语义。
4.4 案例研究
为了阐述动作语义标注方法,我们给出一个案例,仿真对象运行在某二维军事地理信息系统的仿真平台为上。师指挥部向步兵团下达BML命令如下:
〈埋伏〉〈师指挥部〉〈步兵团〉〈开始〉〈不晚于〉〈20XX年3月16日18点00分00秒〉〈在〉〈XXo28′.0N,XXo08′.23E〉〈为了〉〈阻止〉〈引用_1〉。
其中,〈Verb〉组件为“埋伏”,在本体库中搜索“埋伏”对应的本体中的概念,经过动作解释器解析,“埋伏”被解释为一组该平台仿真模型能够直接执行的原子动作,生成原子动作标签序列如下:
〈步 兵 团,平 移,NULL,(XXo28′.0N,XXo08′.23E),(NOW,::<=20XX年3月16日18点00分00秒)〉
〈步兵团,变色,NULL,(BLACK),(::after’1’)〉
其中,符号“::<=”表示“不晚于”,“BLACK”表示颜色,“::after’1’”表示在该动作发生在动作1完成之后。完成标注后,仿真对象开始按顺序执行原子动作序列,仿真平台上代表步兵团的军标首先向地理位置(XXo28′.0N,XXo08′.23E)平移,到达指定地点后变为黑色,表示进入隐蔽状态,动作序列执行完成,即完成埋伏动作。
5 结语
论文对基于BNF描述的BML命令进行了语义标注技术的研究,重点针对BML命令中包含的动作语义,提出一种基于原子动作的动作语义标注方法,提出了动作映射、原子动作标签的概念,并通过案例验证了该方法的有效性。论文为作战管理语言语义标注方法的研究提出了一种新的思路,对于实现BML无歧义表达指挥员意图,指挥控制真实部队和仿真模型遂行军事行动具有一定的参考价值。论文提出的标注方法目前是在军事本体基础上进行,但这种本体在本体谱中尚属于分类学本体,对概念间关系的表达较弱,不能完全满足标注需要;另外,该标注方法的核心是动作映射函数fT,fT通过降低动作的抽象程度实现机器的可理解,针对不同的仿真系统需要构造不同的fT,这就增大了实现的复杂性。这些问题将在以后的工作中进一步研究。
[1]Reus D,Kromp D.BML-enabling of national C2systems for coupling to Simulation[EB/OL].http://www.sisostds.org,2010
[2]Ulrich Schade.Formalizing Battle Management Language:A Grammar for Specifying Orders[C]//06SSIW-068.Orlando,FL,USA:Fall Simulation Interoperation Workshop,2006
[3]Schade U,Michael R.H.Battle Management Language:A Grammar for Specifying Reports[C]//07S-SIW-036,2007Spring Simulation Interoperability Workshop,Norfolk,VA,2007
[4]袁黎苗,鲍广宇,朱立.一种基于BNF的作战管理语言语法表示[J].军事通信技术,2010,31(4):35~39
[5]Andreas Tolk,Saikou Diallo.A System View of CBML(07F-SIW-054)[EB/OL].http://www.sisostds.org,2010
[6]彭勇,彭春光,龚建兴,等.作战管理语言研究综述[J].系统仿真学报,2009,21(17):5336~5339
[7]Crocker D,Overell P.Augmented BNF for Syntax Specifications:ABNF[EB/OL].(1997-11-13)[2010-07-08].http://www.IETF.org/RFC/RFC2234.txt
[8]Saikou Diallo,Andreas Tolk,Chuck Turnitsa.Merging Protocols,Grammar,Representation,and Ontological Approaches in Support of C-BML[C]//06SSIW-008.Orlando,FL,USA:Fall Simulation Interoperation Workshop,2006
[9]李向阳,张亚非.基于语义标注的信息抽取[J].解放军理工大学学报(自然科学版),2004,5(4):39~43
[10]顾晓明.一个基于本体的作战文书理解系统设计与实现[D].南京:东南大学硕士论文,2006
猜你喜欢
哲学分析(2023年4期)2023-12-21 05:30:27
娃娃乐园·综合智能(2022年3期)2022-04-19 12:57:10
中国音乐学(2020年4期)2020-12-25 02:58:06
军营文化天地(2018年2期)2018-04-20 07:07:49
中学生数理化·中考版(2017年6期)2017-11-09 02:46:46
非公有制企业党建(2017年10期)2017-11-03 02:26:27
现代兵器(2017年4期)2017-06-02 15:59:24
现代兵器(2017年4期)2017-06-02 15:58:14
中国老区建设(2016年9期)2016-02-28 09:34:00
文学教育(2016年27期)2016-02-28 02:35:15