基于UKF 的电力系统动态状态估计
2011-06-01 14:05:50李少华
重庆电力高等专科学校学报 2011年6期
李少华,金 涛
(福州大学电气工程与自动化学院,福建福州350108)
式中,f是非线性状态转移函数,g是代数方程组,表示电力系统无源网络。计算步骤如下:
①按照式(2),用mk-1作为状态均值获取sigma点,并且计算状态估计均值m*k:
0 引言
电力系统状态估计作为能量管理系统(EMS)的重要组成部分,发挥着重要的作用[1]。至今,世界上绝大部分电网已经在正常运行中使用了状态估计程序,其在电力系统中所得到的效果已被充分肯定。它能够利用网络接线信息和实时量测信息估计出完整、一致和可信的系统状态。从理论上讲,它就是根据数据采集和监控系统(SCADA或PMU)采集的信息,以求解非线性方程组的迭代方法求得系统状态变量(母线电压的幅值和相角)的最佳估计值。
电力系统状态估计问题已经得到了广泛的重视,国内外研究人员提出了大量算法。当然,由于一些实际原因,这些算法存在着一定的缺陷[2],如占用内存大、估计精度不高等。近年来,由于扩展卡尔曼滤波(EKF)算法简单、容易实现、快速收敛等优点,电力系统动态状态估计主要以EKF理论为基础[3]。文献[4]将EKF算法应用到了电力系统动态状态估计中。但EKF算法在实际使用中存在明显的缺陷:一是线性化有可能产生极不稳定的滤波;二是EKF需计算雅克比矩阵的导数,这在多数情况下不是一件容易的事[5]。近年来,无迹卡尔曼滤波(UKF)算法在导航、测轨、卫星定位、导弹状态估计、语音识别等领域得到了广泛应用[6]。此算法能有效地克服EKF的不足,取得比EKF更高的估计精度,而且不用求取雅克比矩阵,计算复杂度也小于EKF法,在电力系统状态估计中应用容易实现。目前,UKF算法尚未应用在电力系统状态估计中。
1 UT变换
UT变换是一种计算一个随机变量的非线性变换的统计量的方法[5]。它是UKF算法的核心和基础。UT变换的思想是用固定数量的参数去近似一个高斯分布,这比近似任意的非线性函数或变换更容易。实现原理是在原状态分布中按某一规则取一些点,使这些点的均值和方差近似等于原状态分布的数学期望和方差;将这些点代入非线性函数中,相应得到非线性函数值点集,并求取变换后点集的均值的方差[7]。
2 UKF算法
对于非线性系统,可用下面的非线性离散时间状态转移方程和观测方程来表示:

其中,xk∈Rn是在k时刻的状态变量,zk∈Rm是k时刻的量测量;f和h是非线性向量方程;qk~N(0,Qk)是k时刻的高斯白噪声,rk∈N(0,Rk)是k时刻的测量噪声;Qk和Rk是k时刻qk和rk的方差。算法步骤如下:
①预测:用mk-1作为状态均值获取sigma点,并且计算状态估计均值 ^mk和估计方差^pk:
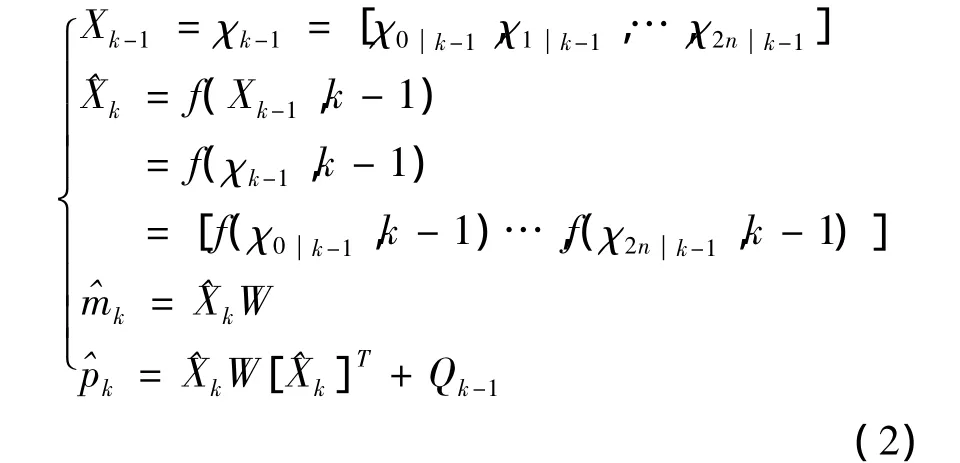
式中,W=[W0,…,W2n]T,χk-1是n×(2n+1)矩阵,χik-1是n维向量。
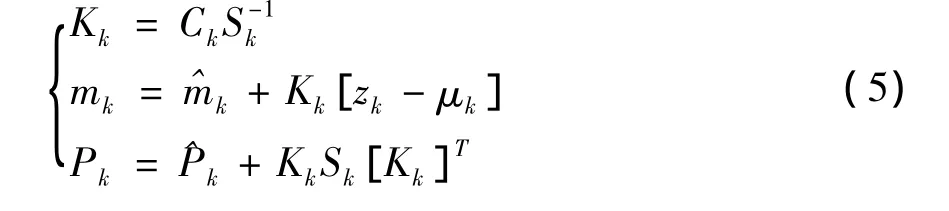
③计算滤波增益Kk和更新的状态均值mk和协方差pk:
3 电力系统动态状态估计
本节将前面介绍的滤波算法运用到电力系统中。电力系统模型通常用如下微分方程组描述:

式中,f是非线性状态转移函数,g是代数方程组,表示电力系统无源网络。计算步骤如下:
①按照式(2),用mk-1作为状态均值获取sigma点,并且计算状态估计均值m*k:

③计算状态估计均值 ^mk:

④计算^yk,解方程:

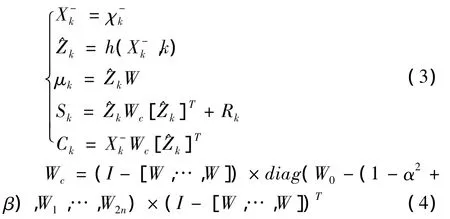
⑤按照式(3),计算估计均值,量测量的估计均值μk和协方差Sk,以及状态量和量测量的协方差Ck:
⑥计算滤波增益Kk和更新的状态均值mk及协方差pk:
4 仿真算例
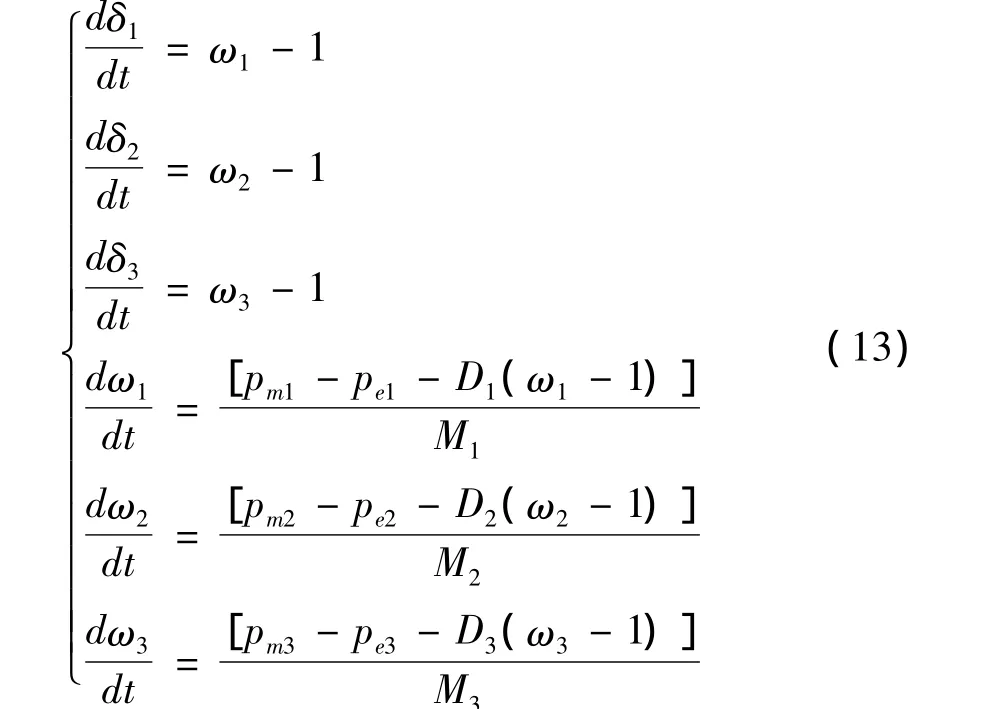
本节将UKF算法在9节点系统(如图1)中仿真、试验。在仿真系统模型中,发电机的动态用功角δ和角速度ω作为状态变量来表示。全部的状态变量是 δ1,δ2,δ3,ω1,ω2,ω3。状态转移方程如下:
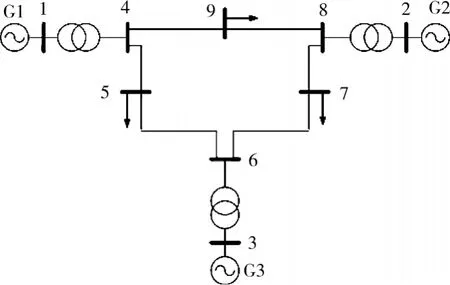
图1 9节点系统接线图
量测方程如下:
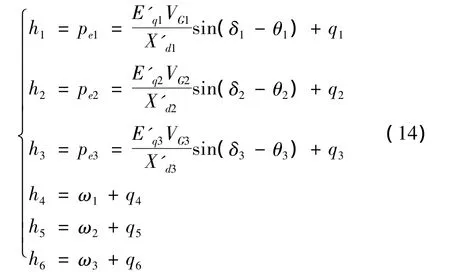
其中,VG和θ表示发电机输出电压的幅值和相角;E'q表示发电机内电压;q表示量测噪声;Pe1,Pe2,Pe3表示发电机输出电功率。发电机相关动态参数如表1所示。
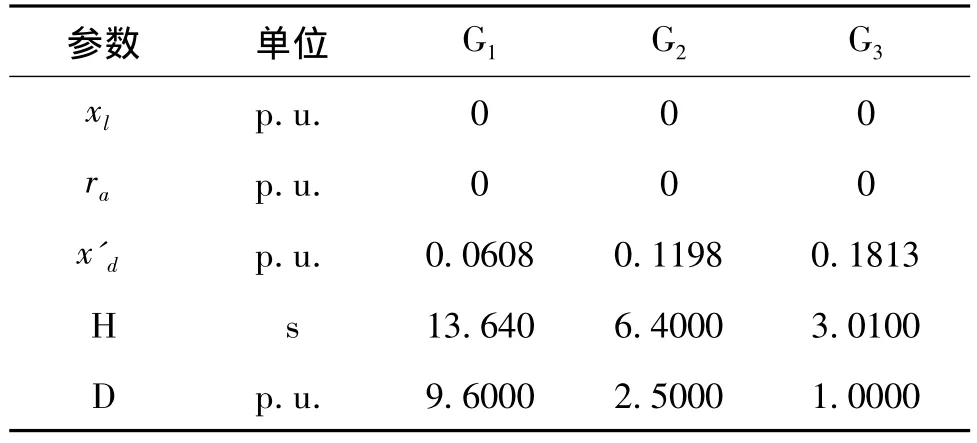
表1 发电机动态参数(Sb=100MVA)
在发电机G1的输入机械功率上设置小的干扰:t=1s时,输入机械功率以步长0.01p.u.递增,100ms之后复位。在式(7)和(9)中,Δt=0.01s。在电功率上加一个幅值为0.001p.u.的随机噪声,在转子转速上加一个幅值为0.00002p.u.的随机噪声。在上述的扰动下,测量值和真实值的对比见图2和图3,每个图中,上面是测量值的波形,下面是真实值的波形。
根据UKF算法用含噪声的量测量去估计真实值,结果见图4~5,图中实线表示真实值,虚线表示估计值。从图中可以看出:在有噪声的情况下,该算法能较好地估计真实值。然而,从图4~5也可以看出,在t=1s之前,估计值和真实值间有较大偏差。通过分析图2~5,可以得出,估计偏差是由在0<t<1期间测量信号信噪比较低造成的。
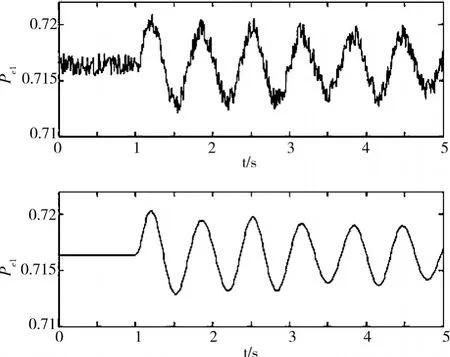
图2 Pe1的测量值和真实值
5 结语
本文介绍了一种基于UT变换的不敏卡尔曼滤波算法(UKF),并将其应用到电力系统动态估计中,最后在9节点系统中仿真、试验。通过仿真算例可以看出,该算法可以较好地克服电力系统的非线性,而且有较高的估计精度。总之,UKF算法主要有以下优点:
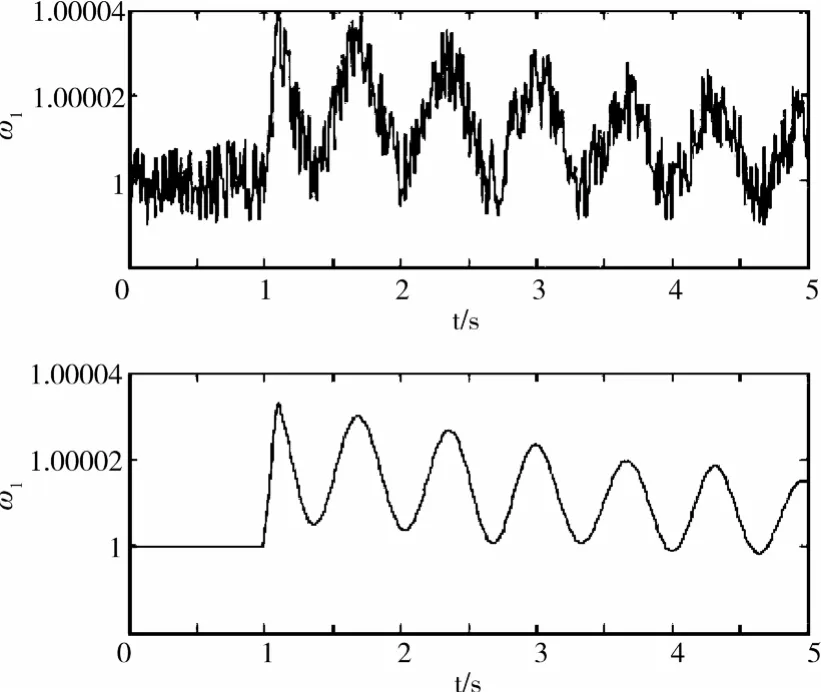
图3 ω1的测量值和真实值
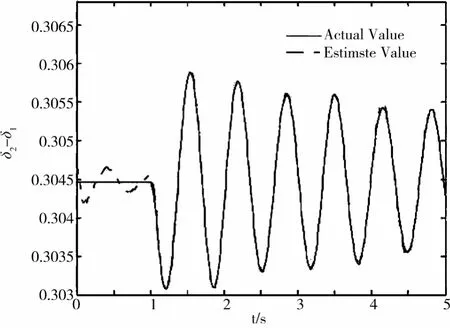
图4 δ2-δ1的真实值和估计值
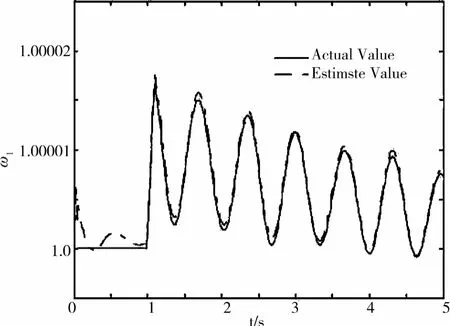
图5 ω1的真实值和估计值
(1)不需要计算雅克比矩阵来对非线性函数作近似变换,计算量小;
(2)能对所有高斯输入量的非线性函数进行近似,均值精确到三阶,方差精确到二阶;
(3)有较好的鲁棒性。
[1]李先彬.电力系统自动化[M].北京:水利电力出版社,1986:124-125.
[2]于尔铿.电力系统状态估计[M].北京:水利电力出版社,1985.
[3]DEBS A S,LARSON R E.A Dynamic Estimator for Tracking the State of a Power System[C].IEEE Trans on Power Apparatus and Systems,1970,89(7):107-113.
[4]Huang Z,Schneider K,Nieplocha J.Feasibility Studies of Applying Kalman Filter Techniques to Power System Dynamic State Estimation[J].Singapore:Proc.8th International Power Engineering Conference,2007:376-382.
[5]唐波,崔平远,陈阳舟.Unscented卡尔曼滤波在状态估计中的应用[J].计算机仿真,2006,(4):82-120.
[6]顾飞飞,唐陇军,孙勇,等.面向事件的智能化电网调度运行日志管理系统[J].电力系统自动化,2010,(4):1-4.
[7]周凤岐,卢晓东.最优估计理论[M].北京:高等教育出版社,2009:149-150.
猜你喜欢
中学生数理化·高一版(2019年12期)2019-12-31 06:52:24
当代石油石化(2018年1期)2018-08-10 06:50:54
中国钢铁业(2018年6期)2018-07-26 06:55:00
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
自动化学报(2016年8期)2016-04-16 03:38:55
电源技术(2016年9期)2016-02-27 09:05:39
无线电通信技术(2015年3期)2015-12-23 11:37:00
电源技术(2015年1期)2015-08-22 11:16:28
电子设计工程(2014年6期)2014-02-27 11:56:54
中国钢铁业(2014年7期)2014-01-26 05:18:12