
具有通信约束的多UUV协调路径跟踪控制
2011-05-27 09:56牟春晖边信黔王宏健
水下无人系统学报 2011年3期
牟春晖, 边信黔, 王宏健, 李 娟
具有通信约束的多UUV协调路径跟踪控制
牟春晖, 边信黔, 王宏健, 李 娟
(哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨, 150001)
针对多UUV间通过水声通信进行交互信息时存在时延的问题, 研究了在通信时滞下多UUV沿多条给定路径编队运动的控制器设计问题。基于反步法设计了单个UUV的路径跟踪控制器, 利用Lyapunov理论证明了路径跟踪控制系统是输入-状态稳定; 针对通信拓扑中存在固定传输延迟问题, 提出了基于平均一致连通性切换网络的时延协调控制律, 并证明了当通信拓扑对应的无向图满足平均一致连通时, 设计的编队控制系统是稳定的, 有效地解决了通信时滞下多UUV的协调路径跟踪控制问题。仿真结果验证了该控制器的有效性。
多UUV; 路径跟踪; 协调控制; 通信时滞
0 引言
近年来, 多无人水下航行器(multi-unmanned underwater vehicle, multi-UUV)编队协调控制的研究工作已经成为当前UUV研究中的热点问题之一[1-4]。而多UUV间的协调控制只有通过通信才能实现协作完成任务, 水下多UUV间通信的唯一手段是水声, 但水声信道窄带宽、大时滞的特性使得编队中的每个UUV无法实时、准确地与外界进行信息交互。因此, 水声信道的通信约束问题成为了制约UUV协调控制系统性能的关键因素。
文献[5]~[7]大多研究的都是在理想通信环境下的多UUV编队协调控制, 未考虑通信时滞等一些水声网络固有的通信约束问题。水声通信中由于传输损失可能导致通信时滞时间过长使得某一UUV不能获得相邻UUV的状态信息而发生碰撞或脱离编队系统导致编队误差不再收敛。在Reza[8]的论文中讨论了多智能体在时滞网络下的平均一致性问题。接着文献[9]又给出了时滞通信网络关于一致性方面一些最新的结果。
本文研究了路径跟踪下多UUV的编队协调控制。当水声通信网络短时间通信链路中断时, 各UUV仍可沿预定路径运动, 不至于处于混乱状态。
在路径跟踪控制器设计中应用了反步法, 通过引入虚拟控制量逐步递推, 使得系统稳定来实现路径跟踪。针对通信拓扑中存在固定传输延迟问题, 提出了基于平均一致连通性切换网络的时延协调控制律, 并应用定理证明了若通信拓扑图为平均一致连通图, 在协调控制器下路径跟踪子系统和协调子系统组成的协调路径跟踪系统是输入-状态稳定(input-to-state stable)的, 且路径跟踪误差趋于零附近的球域内, 协调误差和速度跟踪误差也都收敛于零。
1 UUV运动学模型和动力学模型
对于某型UUV, 其推进装置主要配置主推进器、方向舵和水平舵作为执行机构, 也即UUV在纵向、纵倾和艏向有独立的控制输入。因此UUV的空间运动具有欠驱动特性。
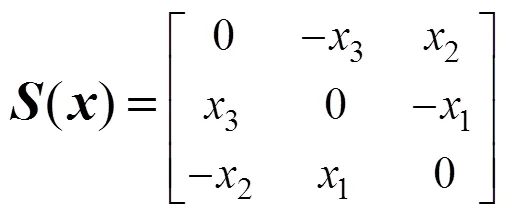
本文考虑研究对象欠驱动UUV运动坐标系原点与重心重合, 且欠驱动UUV重力与浮力平衡的情况下, 则欠驱动UUV的空间运动学模型为
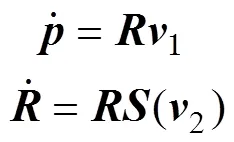

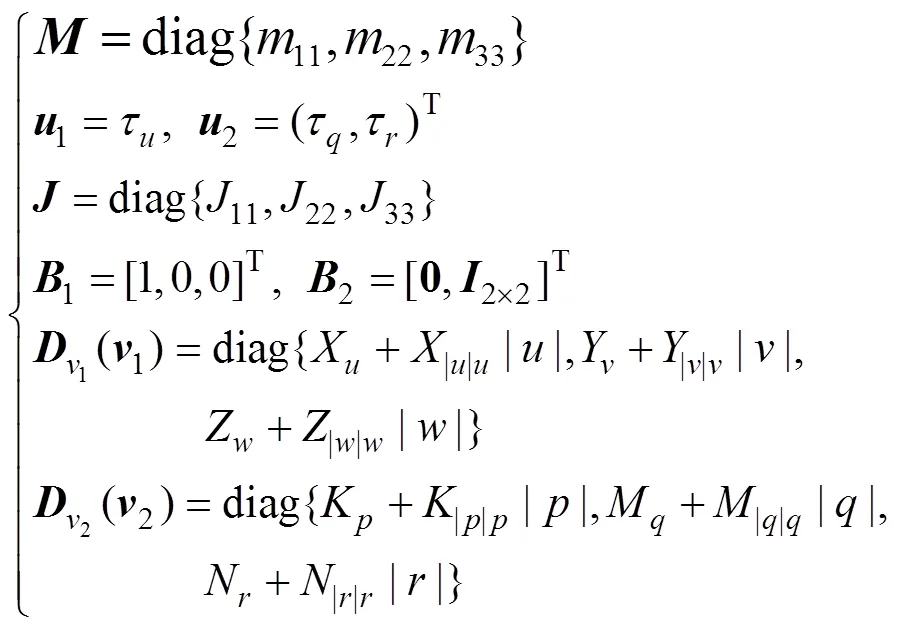
欠驱动UUV的空间动力学模型为


假设忽略非对角元素对欠驱动UUV性能的影响, 即有
为了技术处理简单引进假设1。


不等式两边开方得

2 控制器设计
2.1 路径跟踪控制器设计
欠驱动UUV路径跟踪控制问题可表述如下。
证明: 本文基于李亚普诺夫理论和反步法来证明定理。
1) 第1步, 跟踪误差坐标变换。考虑全局可微坐标变换




移项后整理得




对上述Lyapunov函数求微分, 可得到

令

引入误差变量



3) 第3步, 定义
取控制律


使得


设计反馈控制律


2.2 协调控制器设计




证明: 闭环协调子系统写为向量的形式为


3 仿真验证
考虑3个欠驱动UUV的协调路径跟踪控制, 给定路径

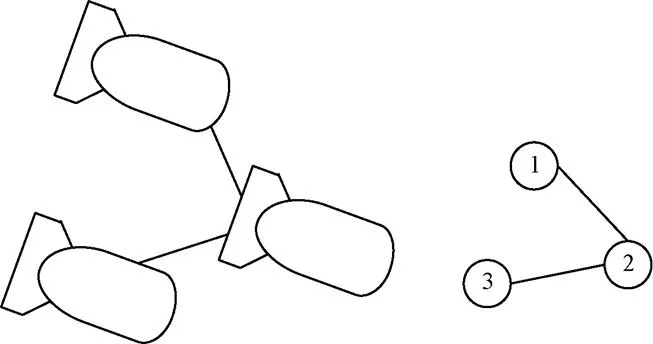
图1 通信拓扑
图2为UUV在3D空间内以直线编队的示意图, 可以看出, 无论UUV的初始位置在何处, 控制器都可以使其快速跟踪给定的参考路径, 并且在通信失效和通信传输延迟下能达到协调。
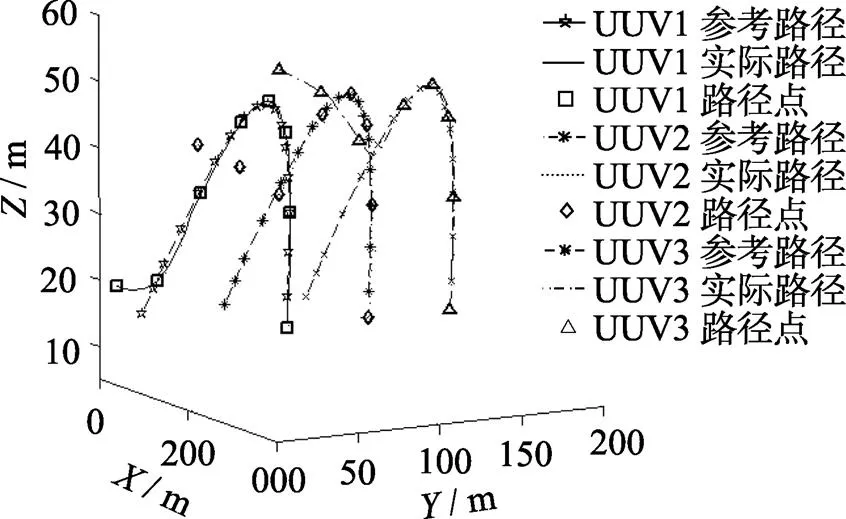
图2 空间协调路径跟踪
图3为3个UUV的路径跟踪误差曲线, 由图可知, 在路径跟踪控制器下, 各UUV的路径跟踪误差都收敛于零。图4为UUV间协调误差曲线, 由图可知在协调控制器下, UUV间的协调误差也都收敛于零。
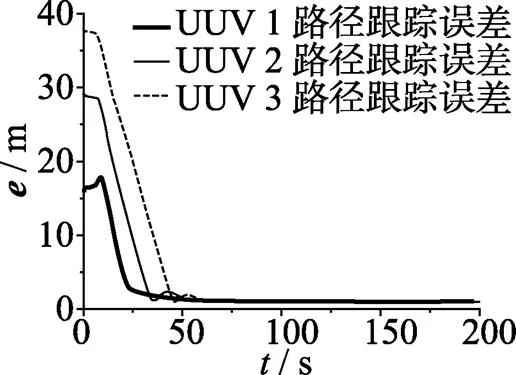
图3 路径跟踪误差
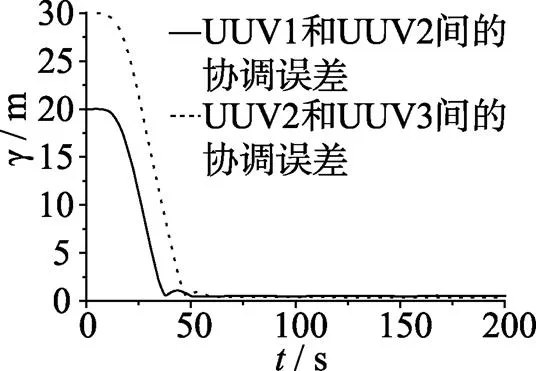
图4 协调误差
4 结束语
本文研究了水声通信中具有通信时滞情况下的多UUV协调路径跟踪控制问题。针对单个UUV的路径跟踪控制, 利用李亚普诺夫理论和反步法设计单个UUV路径跟踪控制器, 并证得路径跟踪闭环系统是输入-状态稳定的。针对多UUV间的协调, 提出了基于平均一致连通性切换网络的时延协调控制律。仿真验证了在具有通信约束下所设计的协调路径跟踪控制器在完成多UUV路径跟踪的基础上实现了多UUV间的协调, 保持了编队队形。
[1] 崔海英, 石秀华, 崔荣鑫. 自主水下航行器主从式编队控制[J]. 鱼雷技术, 2007,15(4): 42-44. Cui Hai-ying, Shi Xiu-hua, Cui Rong-xin. Leader Follower Formation Control of Autonomous Underwater Vehicles [J]. Torpedo Technology, 2007, 15(4): 42-44.
[2] Okamoto A, Feeley J J, Edwards D B, et al. Robust Control of a Platoon of Underwater Autonomous Vehicles[C]//Oceans′04 MTS/IEEE Conference Proceed- ings. Kobe, Japan, 2004: 505-510.
[3] Edwards D B, Bean T A, Odell D L, et al. A Leader- follower Algorithm for Multiple UUV Formations[C]// Pro- ceedings of 2004 IEEE/OES Autonomous Underwater Vehicles. US. 2004: 40-46
[4] 崔荣鑫, 徐德民, 严卫生. 编队约束下的UUV路径跟踪[J]. 西北工业大学学报, 2007, 25(6): 800-804. Cui Rong-xin, Xu De-min, Yan Wei-sheng. Formation Constraint Tracking Control of AUV[J]. Journal of Nor- thwestern Polytechnical University. 2007, 25(6): 800- 804.
[5] Xiang X B, Lapierre L, Jouvencel B, et al. Coordinated Path Following Control of Multiple Nonholonomic Vehicles[C]//Proceedings of Oceans 2009, Bremen, 2009: 1-7.
[6] Xiang X B, Jouvencel B, Parodi O. Coordinated For- mation Control of Multiple Autonomous Underwater Vehicles for Pipeline Inspection[J]. International Journal of Advanced Robotic Systems, 2010, 7(1): 75-84.
[7] Xiang X B, Lapierre L, Jouvencel B, et al. Coordinated Path Following Control of Multiple Wheeled Mobile Robots Through Decentralized Speed Adaptation [C]// Proceedings of the 2009 IEEE International Con- ference on Intelligent Robots and Systems, USA, 2009: 4547-4552.
[8] Saber R O, Murray R M.Consensus Problems in Net- works of Agents with Switching Topology and Time- delays[C]//IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533.
[9] Bliman P, Ferrari-Trecate G. Average Consensus Pro- blems in Networks of Agent with Delayed Commun- ications[C]//Proceedings of the 44th IEEE Conference on Decision and Control, 2005: 7066-7071.
Coordinated Path Tracking Control of Multi-UUV with Communication Constraint
MOU Chun-hui, BIAN Xin-qian, WANG Hong-jian, LI Juan
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Time delay exists in the underwater acoustic communication among UUVs. The purpose of this paper is to study multi-UUV coordinated control with time delay in communication for the path tracking of UUV formation. The path tracking controller of single UUV is designed based on backstepping method, and the path tracking control system is proved input-to-state stable by Lyapunov theory. Considering the fixed time delays in communication topology, a coordinated controller under time-delay based on uniformly connected in mean is proposed. It is proved that the designed formation control system is asymptotically stable if the undirected graph associated with the communication topology is uniformly connected in mean. The controller can effectively perform the coordinated path tracking control under time delay in communication for UUV formation. Simulation result shows its effectiveness.
multi-unmanned underwater vehicle(multi-UUV); path tracking; coordinated control; time delay in communication
TJ630.33; U674.76
A
1673-1948(2011)03-0195-06
2011-04-18;
2011-05-10.
国家自然科学基金(E091002/50979017), 中央高校基金(HEUCF110402).
牟春晖(1983-), 女, 在读博士, 研究方向为潜器与水下机器人控制.
(责任编辑: 杨力军)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
北方工业大学学报(2019年5期)2019-03-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
科技创新导报(2016年20期)2016-12-14
空间控制技术与应用(2015年2期)2015-06-05
