不确定性复杂系统的智能融合控制策略
2011-05-18 07:48:52邓新莉周江川张四平
重庆理工大学学报(自然科学) 2011年3期
邓新莉,周江川,刘 珊,张四平
(1.重庆汉锦科技公司,重庆400010;2.四川兵工学报编辑部,重庆400050)
随着科技现代化进程的推进,对控制技术提出了愈来愈高的要求。以塑胶制品的硫化过程控制为例,它是在一定温度和压力条件下,使胶料和各种助剂发生交联等化学反应,达到所需要的机械和物理化学性能,而实际上橡胶这种高分子材料,没有一个固定的化学分子式,即使是同一种原材料,其分子量可能相差上百倍,甚至上万倍,硫化工艺不具有明显的规律性,其硫化过程是模糊的,与胶料的配方、性质、产品结构和工艺条件等许多不确定性因素密切相关,如何对这类不确定性复杂过程(或对象)进行有效控制已经成为人们关注的焦点之一。
1 控制中存在的问题和复杂系统的对象特性
1.1 控制中存在的问题
对大型复杂过程(或对象)的控制,一般是按某种准则在系统低层将其分解为若干子系统实施控制,在上层协调各子系统之间的性能指标,使集成后的系统处于某种意义下的优化状态。控制中主要存在如下问题:
1)不确定性问题。传统控制是基于数学模型的控制,即认为控制、对象和干扰的模型是已知的或者通过辩识可以得到的。但复杂系统中的很多控制问题具有不确定性,甚至在一定条件下会发生突变。对于“未知”、不确定、或者知之甚少的控制问题,用传统方法难以建模,因而难以实现有效控制。
2)高度非线性问题。传统控制理论中,对于具有高度非线性的控制对象,虽然也有一些非线性方法可以利用,但总体上看,非线性理论远不如线性理论成熟,因方法过分复杂在工程上难以应用。在复杂系统中有大量的非线性问题存在。
3)半结构化与非结构化问题。传统控制理论主要采用微分方程、状态方程以及各种数学变换作为研究工具,其本质是一种数值计算方法,属定量控制范畴,要求控制问题结构化程度高,易于用定量数学方法进行描述或建模。而复杂系统中最关注和需要支持的,有时恰恰是半结构化与非结构化问题。
4)系统复杂性问题。按系统工程观点,广义的对象应包括通常意义下的操作对象和所处的环境。复杂系统中各子系统之间关系错综复杂,各要素间高度耦合、互相制约,外部环境又极其复杂,有时甚至变化莫测,因此传统控制缺乏有效的解决方法。
5)可靠性问题。常规的基于数学模型的控制问题倾向于是一个相互依赖的整体,尽管基于这种方法的系统经常存在鲁棒性与灵敏度之间的矛盾,但对简单系统,其控制可靠性问题并不突出。而对复杂系统,如果采用上述方法,则可能由于条件的改变使得整个控制系统崩溃。
1.2 复杂对象的控制论特性
归纳复杂对象控制存在的上述问题,从控制论角度思考,主要表现为以下特性:系统参数的未知性、时变性、随机性和分散性,系统时滞的未知性和时变性,系统严重的非线性,系统各变量间的关联性,环境干扰的未知性、多样性和随机性[1]。面对这些特性,因其属于不确定性复杂对象(或过程)的控制问题,传统的控制方法难以对这类对象进行有效控制,必须探索更有效的控制策略。
2 控制模型与控制策略
2.1 控制模型
由于被控对象的复杂性和不确定性,按照传统方法,根据被控对象的数学模型,在满足性能指标及约束条件下,综合设计控制器的方法是不能用的,因为对于复杂对象不可能建立严格的数学模型,综合设计系统的前提条件不存在。对复杂系统的控制,可采用以知识表示的非数学的广义控制模型,如图1所示。

图1 广义控制模型
事实上,人们对对象(或过程)特性并不是一无所知,而是知之不全,即人们所具有的对象信息是灰色信息。在实际工程中,依靠控制专家和操作者长期积累的知识和经验,也可以对系统进行有效控制,甚至获得满意的控制效果。它是基于人的智能,控制者的知识、经验和技巧完成预定的控制任务,因此,这种模型是人机结合的控制模型,即控制者(人)的模型和被控对象(机)的模型相结合,如控制者的知识模型和被控制对象的机理模型相结合的广义控制模型。
2.2 控制策略选取
对不确定性复杂系统所具有上述特性,可供选择的策略有神经网络控制[2]、模糊控制[3]、实时专家系统控制[4]、遗传算法控制[5]、免疫进化控制[6]、仿人智能控制[7]等,这些策略在现实应用中针对特定对象都显示出了较强的生命力,为复杂系统的控制提供了新的思路和视角,丰富了控制理论的内容,有重要的理论价值和和广阔的应用背景[8]。
模糊控制能将操作者或专家的控制经验和知识表示成语言变量描述的控制规则,借助这些规则去控制系统。它适用于数学模型未知、复杂的非线性系统的控制。但模糊理论到目前为止并非尽善尽美,对不确定性复杂系统难以获得好的控制效果,因为控制规则难以确定,需要与其他方法配合使用。
ANN(人工神经网络)控制的最大优点是可以充分逼近任意复杂的非线性关系,有较强的学习能力和容错性,能够处理定量、定性数据,利用连接的结构与其他控制方法及人工智能相结合。其预测能力在很大程度上依赖于训练数据的状况,但存在某些缺点:不适合表达基于规则的知识,不能很好地利用已有的经验知识,网络训练时间长有可能导致陷入非要求的局部极值。如果数据中有干扰和不确定性,则过界问题常会出现。但是改进的神经网络以及与其他智能控制技术结合可以在一定程度上弥补上述不足[9]。
遗传算法是一种基于自然选择和基因遗传学原理的优化搜索方法,具有全局寻优的能力,可从广泛分布于设计选项的潜在方案中进行优化筛选。遗传算法早期存在过早收敛的缺点,但经过改进,尤其是与神经网络和模糊控制相结合使用,在一定程度上可克服上述缺点[10]。
专家系统是一种智能化的计算机程序系统,能够利用人类专家的知识和解决问题的方法以处理某领域的问题,是智能控制的一个重要分支,但由于特征信息的采集、特征信息的表达以及完备知识库建立等的实现难度大,所以专家控制系统未必对所有的不确定性复杂对象都是好的选择。
值得注意的是仿人智能控制HSIC(human simulated intelligent control)策略,其在结构和功能上具有以下基本特征:分层递阶的信息处理和决策机构(高阶产生式系统结构);在线的特征识别和特征记忆;开闭环控制结合和定性决策与定量控制结合的多模态控制;启发式和直觉推理逻辑的应用。由于它的基本特点是模仿控制专家的控制行为,因此,它的控制算法是多模态的控制,是多种模态控制间的相互交替使用。该特点可使其控制算法完美地协调控制系统中诸多相互矛盾的控制品质的要求,比如鲁棒性与精确性、快速性与平滑性等,因而也更贴近实际[11]。
上述分析表明,如以HSIC为基础,融合其他控制技术,构成智能融合的控制策略,一定会更加贴近不确定性复杂系统控制的工程实际而取得良好的控制效果。
3 控制算法结构模式
3.1 知识的获取与知识集的建立
知识表示是指从外部知识源到计算机内部的转换过程。知识表示方法主要分为3类:基于规则的表示法、基于框架的表示法和面向对象的表示法。常用的分类是将这3类知识表示方法归为两大类别:产生式表示法和面向对象表示法。前者是一种典型规则表示法,这种表示法的优点是表现形式单一直观,有利于知识的提取和形式化,在计算机上容易实现。后者则更符合人们对客观世界的认识和思维的过程,正在成为当前程序设计的主流方向[3],但其在计算机上实现还有一定的难度。文中采用产生式表示法。
建立知识集实际上是如何表达已获取的知识。控制系统采用产生式规则来建立知识集,其基本结构是
IF<condition>THEN<action>
基于产生式规则构成的系统的突出优点是模块性好,每条规则可独立增删、修改,每个产生式规则之间无直接联系,而且其自然性好,适合于工业过程控制。
3.2 控制算法
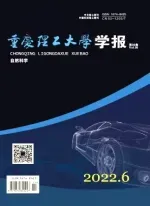
工程控制算法的控制规则集可由工程控制算法推演出来。现以仿人智能控制的原型算法为例,控制算法为
式中:u为控制输出;Kp为比例系数;k为抑制系数;e为系统误差;为系统误差的变化率;em,i为误差第i次峰值。
不确定性复杂系统的参数控制规则集是在上述原型算法的基础上进一步总结人的控制经验而建立的一套适合于不同特征状况的控制规则,具体规则为:


其中:un为控制器的第n次输出值;um为与输入变化量ΔR有关的一个输出保持值;up为强制保持值;e、为系统偏差及其变化率;为对象输出的变化率;为控制器输出的最近一次保持值,式中em,i为偏差的第次极值,r为极值加权因子,可在线修正;Kp1、Kp2、Ki1、Ki2、Kd为比例、积分和微分增益;为在e·≥0期间内偏差的累计;β为切换因子;α、a、b为常数,由知识集中的经验规则确定;R为设定值;δ1、δ2、θ1、θ2为允许的误差及误差速率范围。
4 系统仿真
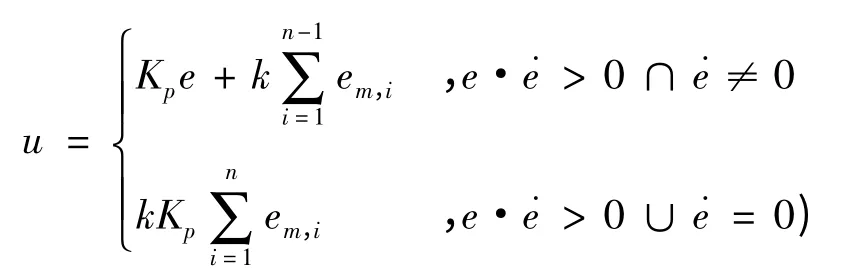
由于是不确定性复杂系统,难以建立数学模型,为了验证控制策略的正确性,可以采用对象或过程参数变化的方式以等效替代的方法,考察控制算法的鲁棒性,如果控制算法鲁棒性强,那么控制策略是可取的。现以工业控制对象中常见的二阶环节大滞后环节为例,分别采用PID、PID+Smith预估器和智能融合控制算法进行仿真,考察其鲁棒性。设被控对象控制模型为
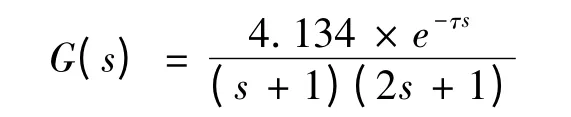
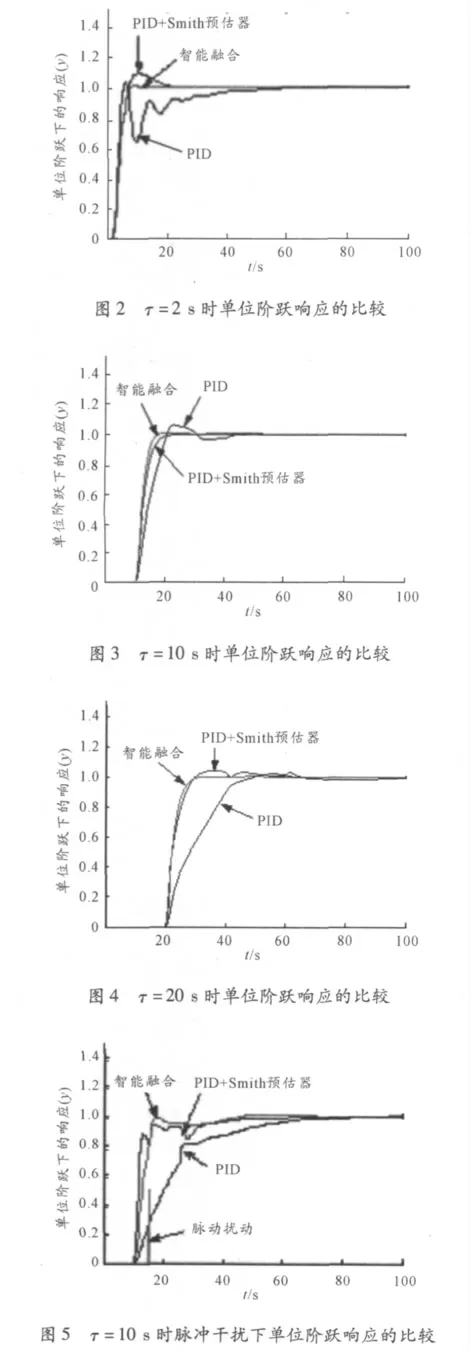
在延迟时间分别为τ=2 s,τ=10 s和τ=20 s时对系统进行仿真比较,响应曲线如图2~4所示。图5显示的是加入外部扰动时的响应曲线,加入的扰动为脉冲信号,其宽度为0.2 s,振幅为0.5。
从图2~4可以看出,无论从系统响应的快速性、稳定性、超调,还是系统的抗干扰能力,智能融合控制策略的性能都优于PID控制和PID+Smith预估器的最优控制。
综上所述,对于不确定性复杂系统中的一些难控特性,智能融合控制策略表现出了很好的控制效果,是一种可供首选的控制策略。
5 结束语
对不确定性复杂系统的控制,由于智能融合控制策略对过程参数变化不是很敏感,具有很强的鲁棒性,不论在稳定性、快速性以及准确性方面都比其他控制策略有明显的优越性。当系统中加入扰动信号,仍然可以保持较好的控制效果,显示出其具有很强的抗干扰能力。
[1] 彭莉,林鹰,杨奕.复杂系统控制中的相关技术讨论[J].西南师范大学学报,2004,29(6):1066-1068.
[2] 滕云,贺春林,岳淼.基于神经网络的语音识别研究[J].重庆师范大学学报:自然科学版,2010,27(4):73-76.
[3] 吴垣甫.神经模糊控制在机器人导航中的应用[J].四川兵工学报,2009,30(5):111-115.
[4] 李娟,明德廷,杨珺.基于模糊推理的农业专家系统研究[J].安徽农业科学,2010,38(6):3277-3279,3281.
[5] 钟静,应宏.优化和约束推理的动态分布式双向导遗传算法[J].重庆师范大学学报:自然科学版,2009,26(2):94-98.
[6] 党媛,李祚泳,邹艳玲.基于蜜蜂免疫进化算法的湖泊富营养化评价[J].安徽农业科学,2010,38(16):8618-8619,8695.
[7] 李铁军,陈虹宇,邵桂芳.基于仿人智能控制的机器人动态目标跟踪[J].重庆工学院学报:自然科学版,2009,23(11):64-69.
[8]Cai Zixing,Zhou Xiang,Li Meiyi.A Novel Intelligent-Control Method Evolutionary Control[C]//Proceedings of the 3’d World Congress on Intelligent Control and Automation.[S.l.]:[s.n.],2000:387-390.
[9] 李祖枢,涂亚庆.仿人智能控制[M].北京:国防工业出版社,2003.
[10]刘太杰,崔莉凤,刘载文.污水处理智能控制进展[J].北京工商大学学报,2005,23(3):9-12.
[11]杨飚,张曾科.仿人智能控制器的动态特性参数整定方法[J].信息与控制,2004,33(6):670-673.
猜你喜欢
数学小灵通(1-2年级)(2024年2期)2024-05-14 09:23:56
法律方法(2022年2期)2022-10-20 06:41:56
中国外汇(2019年7期)2019-07-13 05:45:04
新高考(英语进阶)(2018年1期)2018-04-18 14:00:08
制造技术与机床(2017年6期)2018-01-19 02:41:07
考试周刊(2016年88期)2016-11-24 21:47:37
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
上海金属(2013年4期)2013-12-20 07:57:17