
清铃机传动系统设计与仿真
2011-05-11 02:49袁逸萍孙文磊黄少华刘国浩
制造业自动化 2011年7期
黄 帅,袁逸萍,孙文磊,黄少华,刘国浩
(新疆大学 机械工程学院,乌鲁木齐 830008)
清铃机传动系统设计与仿真
黄 帅,袁逸萍,孙文磊,黄少华,刘国浩
(新疆大学 机械工程学院,乌鲁木齐 830008)
0 引言
新疆是我国三大棉花产区之一,但棉花采摘多以手工为主。我国投入使用的采棉机普遍是摘锭式,且新疆生产建设兵团已提出在十一五末机采棉面积将占其种植面积80%的目标[1]。2006年阿根廷Dolbi农机公司成功研制出梳指式采棉机,该机结构简单、成本较低、采摘时不受株距限制,所以梳指式采棉机的研究前景广阔。清铃机是梳指式采棉机的重要组成部分,它的工作性能直接影响到整机的各项工作指标。现主要研究的有FS4M—2P软摘锭采棉机[2];刮板毛刷式采棉机[3];棉花和杂质相分离的软摘锭采棉机六辊清杂装置[4]等。
1 清铃机的组成工作原理
梳指式采棉机[5]由采摘头、清铃机、集棉箱、配套拖拉机及其连接附件等几部分组成,整机动力由配套拖拉机提供,棉花采摘由采摘台完成,采摘台与清铃机之间有输送棉花的管道相连,清铃机的风机在工作时,输送管道靠近采摘台一端形成负压,将采摘的棉花吸入清铃机中。在清铃机的进棉通道内自上而下安装有转网、闭风器、开松辊、刺条辊、拨棉辊、回收辊、清杂辊和排棉绞龙。清铃机结构如图1所示。
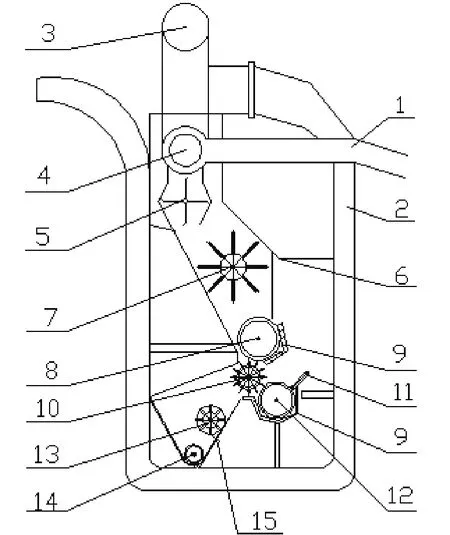
图1 清铃机结构示意图
输送系统将棉铃输送至清铃机顶部后,首先经过开松辊的敲打,使棉铃松散,之后落入刺条辊,由于刺条的钩拉,将棉花缠绕在刺条辊上,刺条辊缠绕棉花并将杂质通过格条栅去除,剩余的棉铃以类似的方式经过回收辊进行处理,干净的棉花就缠绕在回收辊上,在与二者相切的位置上安装高速旋转的拨棉辊,它的速度大于刺条辊和回收辊的速度,且方向相同,拨棉辊取下的棉花经过钉辊,在钉辊旋转的过程中,将拨棉辊甩出的籽棉再次抛甩,籽棉在被抛甩的过程中,籽棉的棉叶、棉枝、沙子等杂质就会再次分离,最后落入栅格板,从栅格中分出,然后通过螺旋输棉绞龙输送到出口,最后由风机将棉花吹入集棉箱。
2 清铃机传动传动系统设计
清铃机的动力来源于配套拖拉机,拖拉机的柴油机输出转速大约为760,经减速至120 左右时输入清铃机的排棉绞龙,然后经过一系列的传递至风机部位。由于皮带和链传动具有结构简单,噪声小,调节和安装比较容易,且农用机械要求较低成本和适应较恶劣工作环境,所以传动系统均采用带传动。要求皮带的安装位置要准确,偏差不应超3mm,皮带安装不应打滑,在皮带运动部位要有安全防护措施[6]。清铃机的传动示意图如图2所示,各参数如表1所示。

图2 清铃机传动示意图表
3 基于Adams的运动仿真
3.1 基于Pro/E清铃机整机建模
在Adams软件中运动仿真,首先要建立三维模型。模型建立一般有两种方法:一种方法是在Adams – View模块中直接建模;另一种方法是在其他三维软件中建好模型后导入Adams软件中。此处采用的是第二种方法,建模时运用的是Pro/E软件。
在Pro/E软件中建好清铃机整机的三维模型后,将其保存为“x-t”格式并存于全英文目录下,用Adams软件中的“Import”命令将模型导入Adams软件中,便可进行运动学仿真的相关工作。建好的清铃机整机传动三维模型如图4所示。

?

图3 清铃机整机传动三维模型
3.2 基于Adams的运动学仿真
将模型导入后,对刺条辊、拨棉辊、回收辊三者在Adams软件中进行添加运动副,然后进行运动学仿真。在对模型进行仿真的过程中,ADAMS/View自动计算模型的运动特性,如:距离、速度信息等。使用ADAMS/View可以测量这些信息以及模型中物体的其它信息。图4分别是刺条辊、拨棉辊、回收辊的速度,加速度,角速度,角加速度等数据:
由以上曲线的变化趋势可得出以下的一些结论:

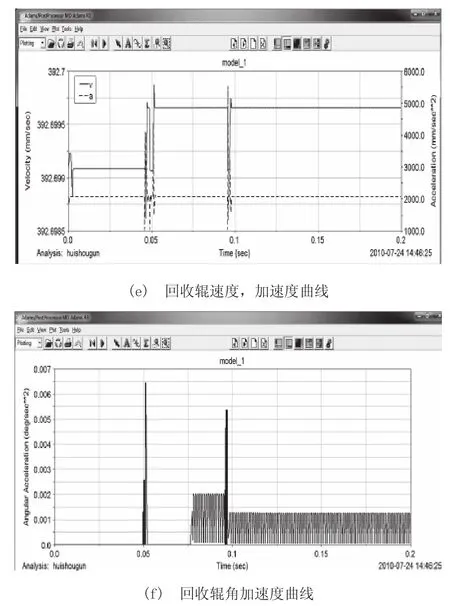
图4 运动仿真所得相关数据
1)刺条棍和回收棍的速度、加速度(图4a,e)变化趋势基本一致,可推知它们的受力状况基本相似,其原因是它们的功能相同,都是将棉铃的棉壳打碎,并收集棉花纤维。
2)拨棉棍的速度和加速度(图4-c)刚开始时与刺条棍和回收棍的变化趋势不同(拨棉棍的加速度刚开始无变化趋势),原因是刚开始工作时,刺条棍和回收棍上没有缠绕棉花,拨棉棍不工作。
3)拨棉棍的角加速度(图4-d)后面部分与刺条棍和回收棍的变化趋势不同(刺条棍和回收棍在震荡,而拨棉棍的角加速度为0),原因是刺条棍和回收棍上棉花层较薄时,拨棉棍不能将棉花刮下来,拨棉棍处于不工作状态,所以受力为零,角加速度也为零。
4)三者所测的角加速度变化频率较大,可知工作时受力情况较复杂,原因可能为棉花输入时不均匀。
5)三者的角加速度变化范围较小,可知力的变化范围较小,原因是棉花的密度较小。
由以上的数据可知,工作时的速度等参数满足设计要求。由分析可知,清铃机的核心部件刺条辊、拨棉辊、回收辊虽然受力状况复杂,但受力变化范围较小,所以其结构不再进行特殊设计或改进,按现有结构即可满足工作要求。
4 结论
本文通过对清铃机的组成,工作原理,传动系统设计以及建模和仿真,对清铃机进行了深入的研究,并通过计算验证了所设计的传动系统,通过仿真验证了整机的设计并获得了在虚拟环境下清铃机工作时的数据,由数据可得出结论,所设计的结构可满足清铃机的工作要求。
[1]陈发,阎红山,王学农,薛理.棉花现代生产机械化技术与装备[M].新疆:新疆科学出版社,2008.
[2]赵岩,王维新,等.FS4M一2R滚筒式软摘锭采棉机的设计[J].新疆农机化,2008(5):13-14.
[3]杨怀君,周亚立,刘向新,等.刮板毛刷式采棉机采摘部件的研究[J].农机化研究,2010.3(3):49-53.
[4]贾顺宁,王维新,张宏文.软摘锭采棉机清杂装置的设计[J].农机化研究,2009,12:114 -117.
[5]董伟.梳指式采棉机关键技术与研究[D].2006.
[6]仇建龙.采棉机的工作原理及设备选用[J].机械研究与应用,2008,21(1):114-116.
Design and simulation of qing-ling machine driving system
HUANG Shuai, YUAN Yi-ping, SUN Wen-lei, HUANG Shao-hua, LIU Guo-hao
针对梳指式采棉机在我国的技术还不是很成熟,而且目前机采棉清铃效率不够高的问题,本
文对梳指式采棉机的清铃机部分工作原理进行深入研究,并对其传动系统进行详细设计和验证。采用Pro/E对清铃机整机三维建模,利用ADAMS对清铃机进行运动学仿真,并利用仿真结果验证是否符合设计要求,为更深入的研究提供相关数据。
梳指式采棉机;清铃机;传动系统;仿真
黄帅(1987 -),男,四川南充人,本科,研究方向为数字化样机的建模与仿真。
TP391
A
1009-0134(2011)4(上)-0089-03
10.3969/j.issn.1009-0134.2011.4(上).28
2010-10-12
猜你喜欢
中国造纸(2022年8期)2022-11-24
少儿科学周刊·儿童版(2022年10期)2022-06-27
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
小读者(2020年4期)2020-06-16
电子制作(2018年10期)2018-08-04
中国棉花加工(2017年5期)2018-01-23
今日农业(2018年1期)2018-01-16
红领巾·萌芽(2015年6期)2015-08-14
中国棉花加工(2015年5期)2015-01-25
