
长江宜昌航道CORS系统建设与应用
2011-04-30 01:56:46李新书
水利信息化 2011年3期
李新书
(长江宜昌航道局,湖北 宜昌 443002)
0 引言
连续运行卫星定位服务系统[1](CORS 系统)是利用全球导航卫星系统(GNSS)技术,建立永久性的连续运行参考站、系统控制和数据处理中心,利用计算机、数据通信、互联网技术将各参考站与系统控制和数据处理中心组成网络,共享参考站数据,系统自动向各类用户发布不同类型的 GNSS 原始数据、RTK 差分改正数据等,是现代 GNSS 的发展热点之一。
当前长江等内河水运发展已上升为国家战略。长江航道的建设和维护是长江航运发展的基础和先导,而高效的测绘是长江航道建设和维护的前提。航道 CORS 系统的建立不仅为长江航道测绘带来深刻的变革,而且也是促进数字航道、智能航运建设的基础工程。
2008 年底,长江宜昌航道测绘处建成航道全线第 1 套单基站 CORS 系统,已连续无故障运行了 2 年多,在葛洲坝近坝航道测量中发挥了重要作用。但由于单基准站和移动站之间,随着作用距离的增大精度却大幅下降,不能满足大范围高精度测量的需求。随着宜昌段数字航道建设的推进,有必要实施多基站 CORS 系统试验建设及应用,为航道的日常维护管理及其他用户提供高精度、连续的时间和空间基准服务,满足基础测绘、航标监控、船舶导航、航运管理等不同层次的应用需求,同时为今后 CORS 系统在航道全线的推广应用探索技术和管理经验。
1 CORS系统方案设计
1.1 系统概述
CORS 系统是建立于现代 GNSS、计算机网络、网络化实时定位服务、现代移动通信等技术基础之上的大区域定位与导航综合服务网络,是网络 RTK的 1 种形式。长江宜昌航道 CORS 系统是在辖区航道范围内建立永久性参考站,通过网络互联构成新一代的网络化的卫星定位综合服务系统。
系统设计建设参照国家的有关技术规范和行业标准,遵循先进性、可靠性、可拓展性、高性价比、易用性等原则[2]。
1.2 系统设计目标
1)以 GNSS 参考站为 1 级控制点,完成区域内GNSS 控制网的布设。为辖区航道各测量、施工部门提供 1 套统一的转换参数,并且进行规范管理,同时也为数字航道前端数据采集提供依据。
2)CORS 系统控制区域内动态双频 RTK 测量的内符合平面精度 3.0 cm、高程精度 5.0 cm 以内;事后平面精度 3.0 mm、高程 5.0 mm 以内的精度;同时也为单频、手持 GNSS,航标遥测监控提供差分服务,使之精度得到提高,平面精度优于 0.5 m。
3)控制区内的测量作业依靠移动终端,无需额外架设参考站,从而减少由于架设参考站而导致的重复建设和资源浪费,提高生产效率。
4)实现 GNSS 数据的空间数据和数字航道系统的无缝对接,实现共享,为数字航道提供可靠的空间数据。
5)通过 CORS 系统为水位、航标监控及船舶监控功能提供服务。通过 Internet 向航道范围内提供事后精密定位服务功能。
1.3 系统性能指标
系统要求达到表1 所示的各项性能指标[3]。
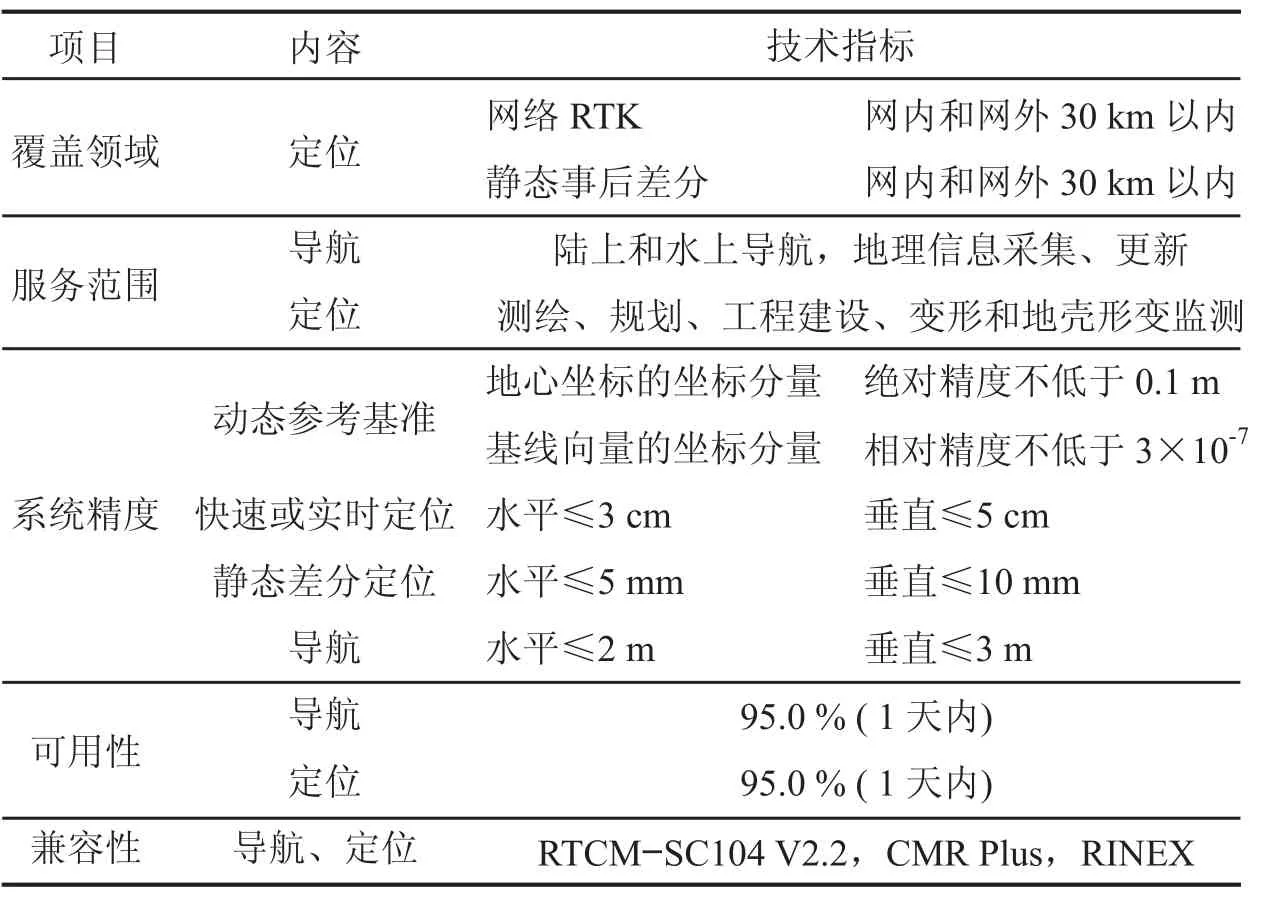
表1 系统性能指标
1.4 系统原理和流程 [4]
1.4.1 系统原理
CORS 系统主要由 GNSS 基站、网络和用户系统组成,系统原理如图 1 所示。
1.4.2 系统作业与数据流程
1)系统工作流程
基准站连续不间断地观测 GNSS 的卫星信号,获取该地区和时间段的“局域精密星历”及其他改正参数,按照用户要求把静态数据打包存储,并把基准站的卫星信息送往服务器上 NRS 软件的指定位置。
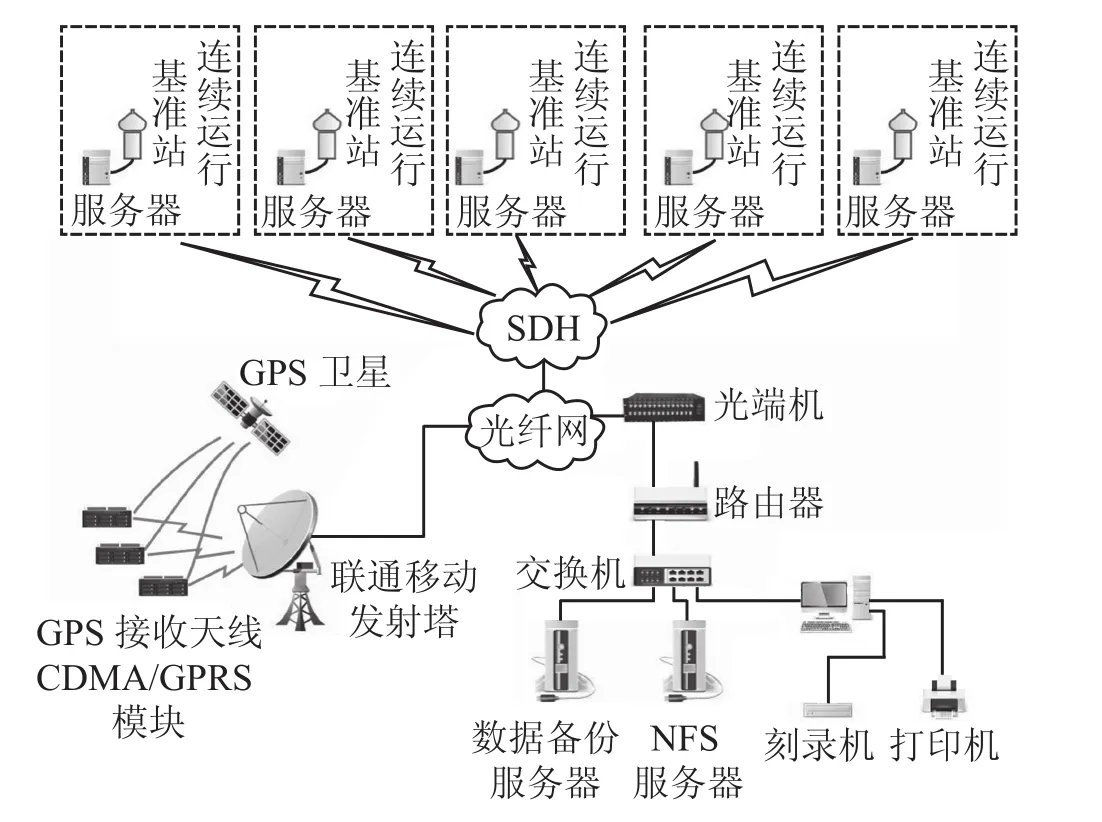
图1 CORS 系统原理图
用户单元接收定位卫星传来的信号,并解算出地理位置坐标。
用户单元的数据通讯模块通过因特网,从服务器的指定位置获取基准站提供的差分信息后,输入用户单元的 OEM 板进行差分解算。
用户单元在野外完成后差分测量后,可以从指定位置下载同步时间的基站静态数据进行基线联合解算。
2)GNSS 硬件系统总体数据流程
GNSS 系统总体数据流程图如图 2 所示。
2 基准站建设
2.1 基准站选址原则
CORS 基准站选址是 CORS 系统整体技术设计的重要内容,关系到整个 CORS 系统能否良好运行。CORS 基准站选址原则如下[5]:
1)远离周边的高大建筑、树、水体、海滩和易积水地带,距离应不小于 200 m;
2)应有 10° 以上的地平高度角卫星通视条件;
3)远离电磁干扰和雷击区,距离应不小于 200 m;
4)避开铁路、公路等易产生振动的地点;
5)应避开地质构造不稳定区域,如断层破碎带,易发生滑坡、沉陷等局部变形,以及易受水淹或地下水位变化较大的地点;
6)应便于接入公共通信网络;
7)具有稳定、安全可靠的交流电电源。

图2 GNSS 系统总体数据流程图
2.2 基准站布局
基于系统需求,结合宜昌航道辖区分布,拟在辖区内布建 4 个 CORS 参考站,其中 1 个是已经在宜昌航道测绘处楼顶的单基站,另外 3 个选址在枝江、枝城、秭归。最短边 35 km,最长边 65 km,网内覆盖面积超过 3000 km2。考虑到宜昌测绘处地处雷击频发区,故将宜昌测绘处基站移至宜昌航道局办公楼楼顶。
2.3 基准站测试
为了考察各个拟选基准站的站址环境、基准站网软件的解算能力,以及流动站 RTK 作业的效果,对以上 4 处进行了实地数据采集,外业观测的标准为采样率 15 s,观测 24 h。分析测试位置的卫星覆盖情况、采样数据历元、周跳、接收机时钟、多路径影响、所获取卫星信号的信噪比。
以宜昌基准站为例,测试结果如下:
1)宜昌站具有良好的卫星跟踪条件,测站视场开阔,无阻碍物,10° 以上成功跟踪接收 100 % 的卫星数据,通过数据完整性测试,有少部分时段只有 9 颗卫星,位置精度强弱度 PDOP 值基本小于 2,满足了系统建设最低要求,宜昌站卫星数如图 3 所示,24 h PDOP 值如图 4 所示。

图3 宜昌站卫星数
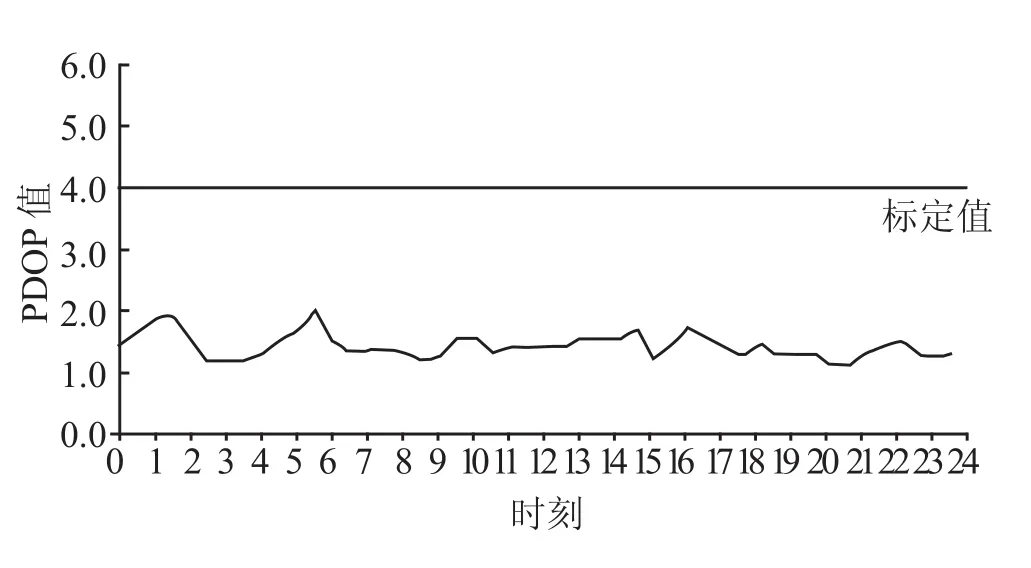
图4 宜昌站 24 h PDOP 值
2)无数据缺失;
3)通过“周跳测试”,24 h 内仅有 30 个周跳;
4)通过“历元数据测试”,记录的所有历元100 % 数据完整;
5)通过“接收机时钟测试”,没有接收机时钟复位和时钟漂移;
6)通过“多路径测试”,该站多路径影响非常小,MP1 RMS 值为 0.04 m,MP2 RMS 值为 0.05 m。
其余枝江、枝城、秭归 3 个基准站,0° 以上至少成功跟踪接收 99.6 % 的卫星数据,通过数据完整性测试,有少部分时段只有 8 颗卫星,均无数据缺失,24 h 内最多有 12 个周跳,记录的所有历元 99 % 数据完整,没有接收机时钟复位和时钟漂移,TEQC 检查数据质量 MP1 RMS 值最高 0.26 m,MP2 RMS 值最高 0.25 m。
通过分析,各测站接收卫星数目满足建立基准站的最低要求,数据有用率高,多路径效应影响很小,历元数据获取率高,适合建立连续运行的基准站网络。4 个基站相邻站最大间距约为 65 km(秭归—枝城),最短基线距离为 37 km(枝城—枝江),平均基站距是 48.7 km,网内覆盖面积超过 3000 km2,覆盖范围适中;充分利用原有的单基站资源,投入资金少,能够满足宜昌航道基础测绘、船舶导航、航标监控等需求。
2.4 基准站功能
4 个永久性的基准站,均设计为无人值守型,设备应尽可能少,连接要可靠。4 个基准站采用 NET-S8 主机。基准站为分体式,主机天线置于屋顶,主机置于室内,采集的数据直接显示在服务器上。基准站保存工作机(和监测机)采集的 GNSS 数据,目前主要在计算机硬盘上保留至少 60 d 的数据。基准站按设定的时间间隔自动将 GNSS 观测数据通过 SDH 网络将数据传输给系统控制中心。在断电情况下,基准站能靠自身的 UPS 支持 2 h 以上。系统控制中心通过远程方式,设定、控制、检测基准站的运行。
2.5 基准站结构与设备
基准站由仪器室和观测墩 2 部分组成。
观测墩用于支撑 GNSS 观测天线。观测墩柱体内预埋 PVC 管道,用于铺设天线电缆。仪器墩外部进行保温和防风处理,顶部安装强制对中装置。对强制对中器顶部中心点施测水准。观测墩需做隔热、隔震等处理。室外天线防雷接地使用观测墩所在大楼的防雷地网,防雷地网对地地阻必须小于 5 Ω,采用提前放电式避雷针,避雷针的引线采用双接点与防雷带或建筑物的主筋焊接,焊接点做好防锈措施。天线采用扼流圈天线,支持精确度为 0.1 mm,能够有效抑制多路径效应的影响,结合不妥协的稳定的相位中心(小于0.8 mm)可以抑制射频干扰。采用铝材质的扼流圈和 1 个 Dome#Margolin 偶极元件,低噪音,低功耗,还拥有同步频率选择功能。
仪器室用于安置基准站设备。离观测墩距离不超过天线电缆的许可长度,并提供可靠的电力供应和网络接入,此外安装防盗设施并保证良好的通风散热。市电做好防浪涌保护措施,并联装在给 UPS供电的市电前。机房内所有设备均做接地处理。基站主机采用 SOUTH-NET-S8,是针对 CORS 系统应用的高性能 GNSS 接收机。NET-S8 采用坚固耐用的铝合金封装,提供了 2 个串口和以太网接口,并配备液晶显示屏,便于对接收机进行参数更改设置及远程控制。
3 控制中心建设
系统控制中心是整个 CORS 系统的神经中枢,主要由内部和外部网络、数据处理软件、服务器等组成,通过 SDH(同步数字体系)专线实现与基准站间的有线连接,通过路由器实现内网与外网服务器的数据通讯。系统控制中心的功能有数据处理、信息服务、网络和用户管理等。
3.1 数据处理
主要对各基准站采集并传输过来的数据的质量进行分析和评价,并对这些数据进行多站数据综合和分流,建立系统综合误差模型,进行 RTK 实时计算和服务,实现数据存储,该功能主要是由 NRS Net 软件实现。系统控制中心可输出的数据如下:
1)RTCM V2.3 伪距差分修正信息,服务于亚米级差分和米级定位导航的用户;
2)RTCM V2.3/RTCM V3.0/CMR 相位差分修正信息,服务于厘米级、分米级定位的用户;
3)RINEX V2.0/2.1 原始观测数据,服务于测绘、规划建设的高精度控制测量和重要设施的变形监测等事后差分定位。
3.2 信息服务
用于实现向各类用户提供数据服务,系统控制中心由 NRS Server 软件通过外网服务器进行播发,支持 TCP/IP 和 NTRIP 协议。登录方式支持 Internet/GPRS/CDMA 登录播发差分数据给用户。
3.3 网络管理
系统控制中心系统由城域网(LAN)连接和广域网形成,作为网络中心,内部与外部网络物理隔离,以提高整个系统的网络安全性。网络管理采用专用服务器,实现对网络监视、运行及管理。
3.4 用户管理
系统控制中心对所服务的各类用户进行管理,包括以下内容:用户测量数据管理,用户登记、注册、撤消、查询和权限管理。
4 系统测试与运行
全部 CORS 系统集成工作结束后,系统进入最终调试、测试阶段,分别进行了 GNSS 信号线测试(存储 GNSS 数据,分析 2 根线缆信噪比)、基准站坐标解算确认(对基准站进行高精度 ITRF 框架坐标解算)、RTK 可用性(测试网络 RTK 在 24 h 内的工作状况,对系统进行完备性检核)和精度测试(通过流动站观测对全市范围内一定分布的多个静态点进行连续观测,进行内、外精度符合测试)。
系统运行稳定,内外符合精度达到设计要求,网内精度分布均匀,初始化时间普遍小于 40 s。网络 RTK 在整个覆盖区域内精度稳定。系统 RTK 测试的外延性较好,网外 28 km 处流动站设备仍能完成初始化,且内外符合精度平面小于 3.0 cm,高程小于 4.5 cm。各种通讯方式(GPRS,CDMA)都满足用户终端对通讯能力的要求。系统对第三方设备兼容性好,能够兼容国内外主流所有品牌的 GNSS 接收机。
2010年8 月中旬完成了系统测试后,正式开始试运行,到目前为止系统一直稳定运行,卫星及差分改正信号稳定,没有出现任何故障,达到或优于技术要求。
5 结语
长江宜昌航道 CORS 系统投入运行以来,经过长江中游和库区航道维护、对外工程、葛洲坝枢纽航道等测量的实际应用检验,初步显现一定优势和效果,在长江航道全线具有广阔的推广应用前景。
具体优势和效果如下:
1)测量周期明显缩短,测量效率显著提高。在实际观测过程中,整个作业周期缩短 30 % 左右,尤其是在外业作业准备时间上,减少 70 % 左右的时间,在作业周转、调度准备的时间上,也大大节约。
2)传输信号的稳定性大大提高。在测量过程中,没有出现任何信号中断的情况,卫星及差分改正信号稳定,在测量区域任何地点,应用效果良好。基准站系统运行正常,流动站获得固定解时间也大大缩短。
3)定位精度可靠,系统维护成本低。由于系统工作稳定,始终能够在测量区域接收到稳定的差分信号,平面精度达到 3.0 cm,高程精度达到 5.0 cm,同时不需要多余的人工干预,设备维护成本大大降低。尤其在航道维护应急测量方面,其优势更加明显,其测量成果对航道维护工作指导作用将更强。
4)通过 GPS 移动设备在测量中的运行,为今后测量设备的购置提供稳定的设备选型基础,节约设备选型前期投资费用。
[1]刘经南,刘晖. 连续运行卫星定位服务系统——城市空间数据的基础设施[J]. 武汉大学学报 (信息科学版),2003 (6): 259-264.
[2]张志文,王文旭,黄立人,等. 天津市 GPS 连续运行参考站网系统[J]. 城市勘测,2007 (6): 51-55.
[3]郭万里,张永,王小刚,等. 城市 GPS 连续运行参考站网 (CORS) 应用综述[J]. 人民珠江,2008 (1): 65-67.
[4]肖建华,王泽民,周剑,等. WHCORS 的建设与应用研究[J]. 地理空间信息,2006 (4): 1-3.
[5]唐文刚,王建辉,金元德. 虚拟参考站系统的设计与建立[J]. 现代测绘,2004 (2): 13-15.
猜你喜欢
党员生活·下(2022年1期)2022-04-23 21:23:01
当代音乐(2021年12期)2021-12-15 09:55:43
学生天地(2020年31期)2020-06-01 02:32:24
三门峡职业技术学院学报(2019年1期)2019-06-27 07:32:56
留学(2017年5期)2017-03-29 03:03:54
中华奇石(2016年9期)2016-12-15 14:20:46
电测与仪表(2016年6期)2016-04-11 12:07:16
汽车维修与保养(2015年2期)2015-04-17 01:30:33
淮南师范学院学报(2015年3期)2015-03-22 01:16:13
水道港口(2014年1期)2014-04-27 14:14:38
