精密单点定位在线GNSS数据处理精度比较分析①
2011-04-27 07:26吕翠仙
全球定位系统 2011年3期
高 攀,郭 斐,吕翠仙,唐 龙
(武汉大学测绘学院,湖北 武汉430079)
0 引 言
精密单点定位(Precise Point Positioning,简称PPP)指的是利用单台GNSS接收机采集的伪距和载波相位观测值以及由IGS等组织提供的精密卫星星历及卫星钟差产品,综合对各项误差进行改正来实现高精度的定位技术[1]。目前,随着PPP技术和网络技术的迅速发展,国内外已经有不少科研机构相继推出了自己的在线网络定位服务,这些服务大部分都面向全球用户免费开放。普通用户只需按其协议,将接收机的原始观测数据转换并压缩成标准的RINEX格式上传至在线定位服务系统,系统便会在较短(解算完毕)的时间内将定位结果以邮件形式发送给用户,方便了GPS用户的内业处理,同时也降低了作业成本[2]。这些在线服务系统的出现将在GPS差分参考站和GPS控制点的建设、偏远地区GPS基站的建立、超长基线测量、GPS高程测量和GPS控制网解算等领域具有广阔的应用前景[3]。首先对GNSS在线PPP服务系统进行了简单介绍,并着重针对当前比较成熟的四款在线PPP服务系统进行了比较,采用若干IGS跟踪站的实测数据进行PPP解算,比较分析了各系统的数据处理能力及其精度状况。
1 PPP在线定位服务
PPP在线定位服务系统将网络技术和精密单点定位技术结合到一起,可以全天候自动为用户提供高精度的PPP定位服务。用户只需要登陆相应网站,将观测数据上传到指定的服务器,系统便自动下载相应的精密星历和精密钟差自动解算,并将最终定位结果以邮件的形式反馈给用户。其服务流程如图1所示[4-5]。这种无需基准站同步观测的在线PPP技术,不但降低了成本,而且使外业操作更加灵活。这一模式使得普通用户能够方便快捷的使用精密单点定位服务,有利于PPP技术的推广。

图1 在线PPP服务流程
PPP在线定位服务是一种重要的数据处理手段。GPS用户可以通过使用在线PPP技术能够获取任一测点在全球框架下的精确位置、对流层延迟等信息。目前全球主要有四大在线PPP服务系统,分别是加拿大自然资源部的CSRS-PPP、加拿大新伯伦瑞克大学的GAPS、美国喷气动力实验室的APPS以及西班牙GMV公司的magicGNSS。下面分别加以简要介绍:
1)CSRS-PPP是加拿大自然资源部(NRCan-Natural Resources Canada)大地测量部2003年10月开发了一套免费的后处理在线定位服务系统,方便GPS用户获取加拿大空间参考系统(CSRS)坐标。
2)GAPS(GPS Analysis and Positioning Software)是由加拿大新伯伦瑞克大学开发的一个在线定位服务系统,尽管该系统主要是为定位服务的,但也可以为广大用户在电离层延迟估计偏差、卫星钟差、多路径误差方面提供免费服务。
3)APPS(Automatic Precise Positioning Service)是由美国喷气动力实验室(Jet Propulsion Laboratory-JPL)开发的一个在线PPP服务系统,该系统采用JPL提供的一些国际最先进的GPS定位技术,接收GPS观测文件,对GPS接收机进行高精度动态或静态定位,APPS支持 RINEX2、RINEX2.11输入文件,GIPSY TDP文件。该系统提供以下四方面服务:①实时GPS卫星轨道和钟差产品;②每日及每周的高精度GPS轨道和钟差产品;③处理GPS观测数据的GIPSY-OASIS软件。④免费提供AutoGIPSY(AG)服务,静态后处理服务。
4)magicGNSS是由西班牙GMV公司维护的一个在线精密单点定位服务系统,能够实时处理GPS和GLONASS的RINEX格式的数据,目前该系统仅支持双频PPP[6]。
2 PPP在线定位精度比较与分析
2.1 数据获取
随机选取2011年3月1日(年积日DOY 060)中国、美国、欧洲以及非洲境内四个IGS跟踪站的观测数据进行静态模拟动态解算。四个跟踪站分别是WUHN、BRUS、NIST和WIND。这四个跟踪站的观测数据从IGS网站上获取,并从SOPAC网站获取了四个跟踪站的精确坐标,将其作为后续静态、动态解算的参考真值。
2.2 处理策略
由于各PPP在线服务系统是由不同的机构所维护,在数据处理中所采用的数据处理策略有所不同,如表1所示。

表1 各PPP在线服务系统动态数据处理策略
2.3 动态结果比较
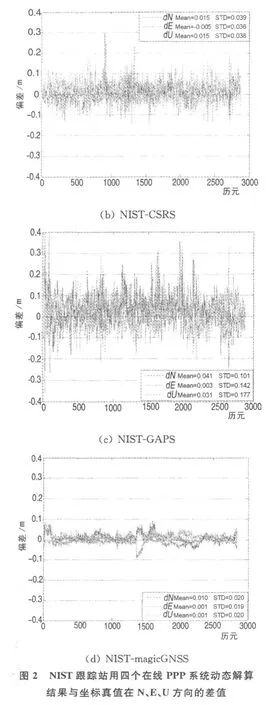
处理BRUS、WUHN、NIST和WIND四个IGS测站的观测数据得到了各个测站随时间变化的三维坐标序列,为了使结果更直观,将四个在线处理软件解算得到的坐标与参考真值进行求差,并将其差值转换至N(北)、E(东)、U(高)方向进行比较。值得注意的是,APPS解算得到的是天线相位中心的位置,并非参考点的坐标,其余三款软件解算的结果则是基于地面参考点的坐标。因此,若直接进行比较,APPS对应的坐标在U方向有较大的系统偏差。为方便比较,首先将APPS定位的结果统一至地面参考点(扣除其天线高及天线偏心),绘制各在线处理软件解算偏差(dN、dE、dU)的时序图,限于篇幅,在此仅列出NIST和WUHN跟踪站的误差时序图,如图2所示。

图2中从上至下依次为APPS、CSRS、GAPS和magicGNSS的处理结果。分析图2可以看出,APPS解算的结果比较稀疏,其解算频率仅为5 min间隔,而其余三款软件则是根据用户所提供的原始观测文件的采样率逐历元解算。从偏差均值来看,采用静态模拟动态方式,几乎所有软件在平面与高程方向均能满足cm级的定位精度;从标准差角度,不同软件解算的结果差异较大,其中GAPS解算结果N、E、U方向的标准差达到1~2 dm,CSRS与magicGNSS解算结果相对较好,其标准差优于1 dm。总体而言,采用上述四款在线PPP处理软件均能够实现1~2 dm的动态定位精度。
类似地,图3中的时序图是跟踪站WUHN分别用APPS、CSRS、GAPS和magicGNSS的处理结果,图中显示,采用APPS解算结果偏差相对较小,在平面方向上偏差在1 cm左右,GAPS解算结果相对较差;从标准差角度来看,除了GAPS解算结果在高程方向(U方向)超过1 dm,其他软件解算结果在N、E、U方向均优于1 dm.


图3 WUHN跟踪站用四大在线PPP系统动态解算结果与坐标真值在N、E、U方向的差值
2.4 静态结果比较
为了进一步分析 APPS、GAPS、CSRS以及magicGNSS四个在线PPP服务的精度,我们随机选取了BRUS、NIST两个IGS跟踪站2009年1-12月的观测数据进行了静态解算,随机选取每一个月的第18天的观测数据进行静态解算。同理,将静态解算结果转换至N、E、U方向上,得到两个跟踪站在N、E、U方向随时间变化的坐标差dN、dE、dU的时序图,如图4~图9所示。
图4~图9显示,用CSRS处理 BRUS和NIST这两个跟踪站的观测数据时,绝大部分的数据处理结果都相当好,N、E、U三个方向的偏差均在5 cm以内,而少数时段的处理结果较差,其偏差达到了0.5 dm左右。究其原因,这可能是由于软件本身对数据粗差的抵抗能力较差所致。除CSRS之外,其余三款在线PPP软件静态定位的精度在平面方向为2~3 cm,高程方向优于5 cm.至于图中测站各方向的定位偏差呈系统性偏差和一定的趋势项,尤其是图6、图7最为明显,这主要是因为解算时间跨度较大(一年),而选择的参考坐标是基于某一固定的历元时刻,而测站所处板块的运动使得其参考坐标并非固定不变。
对图4~图9中的定位结果进行均方差统计,得到各在线PPP处理软件静态精密单点定位的精度如表2~3所示。

表2 静态模式下BRUS跟踪站在N、E、U方向上精度/m

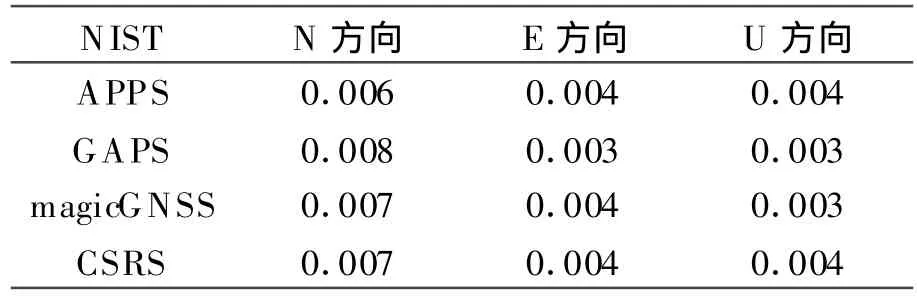
表3 静态模式下NIST跟踪站在N、E、U方向上精度/m

从表2和表3可以看出,在静态模式下四个在线PPP服务系统均具有较强的数据处理能力及较高的定位精度,可以满足一般工程测量等应用需求。
3 结 论
比较分析了APPS、GAPS、magicGNSS以及CSRS四款在线PPP处理软件的数据处理能力及精度,结果表明,利用不同软件处理相同的数据,其处理能力与精度有所差异,这主要是由于不同软件所采用的定位算法及处理策略不一致。但总体而言,四大在线PPP软件在静态、静态模拟动态的方式下均具有较高的数据处理能力和较高的定位精度,可以满足一般工程测量等应用需求。此外,定位精度的高低取决于GPS原始观测数据、IGS轨道、钟差等产品的质量以及处理软件所采用的算法优劣。因此,用户可根据精度需要及实际作业条件选择合适的在线PPP服务系统,必要时还可进行相互检核提高定位结果的可靠性。
[1] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009.
[2] 徐 莹,聂桂根,吕乔森.GNSS在线数据处理系统的比较与分析[J].测绘通报,2010(12):30-33.
[3] 李 黎,王潜心,李 旋,等.CSRS-PPP在线定位服务系统精度分析[J].城市勘测,2008:70-72.
[4] Yves M,Pierre T,Franois L,et al.Online precise point positioning a new,timely service from natural resources canada[J].GPS WORLD,2008(9):1-10.
[5] Ebner R,Featherstone W E.How well can online GPS PPP post-processing services be used to establish geodetic survey control networks[J].Journal of Applied Geodesy 2,2008:149-157.
[6] The Precise Point Positioning Software Centre.Online PPP services[EB/OL].Natural Resources Canada,[2011-02-15].http://magicgnss.gmv.com/ppp.
猜你喜欢
商界评论(2022年1期)2022-04-13
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
云南画报(2021年8期)2021-11-13
建材发展导向(2021年12期)2021-07-22
北京航空航天大学学报(2021年6期)2021-07-20
学生天地(2020年6期)2020-08-25
草原(2018年2期)2018-03-02
电子制作(2017年20期)2017-04-26
专用汽车(2015年1期)2015-03-01