
超声红外复合测距系统设计
2011-04-10 02:23张邦成张玉玲韩跃营姜艳青
制造业自动化 2011年14期
张邦成,张玉玲,王 昕,韩跃营,姜艳青
ZHANG Bang-cheng,ZHANG Yu-ling,WANG Xin,HAN Yue-ying,JIANG Yan-qing
(长春工业大学 机电工程学院,长春 130012)
0 引言
近年来,移动机器人已成为高技术领域内具有代表性的战略目标,在现今的各个领域都有着越来越广泛的应用[1]。精确的测距是移动机器人实现其各种功能,完成相应任务的关键因素。测距系统不仅要性能稳定、精度高、鲁棒性高,而且要求其能在恶劣环境下进行作业,实现人机分离。目前,测距系统中广泛应用的传感器主要有视觉、红外、激光、超声波等[2]。其中,视觉传感器测距易受外界因素影响,存在目标缺失、模糊等问题,且激光和视觉传感器价格昂贵,对控制器要求较高,不利于其广泛使用。超声波传感器由于信息处理简单、距离分辨力强、实时性强和价格低廉等优点而广泛应用于各种移动机器人。但普通超声波传感器存在无法测量20cm以内的近距离测量盲区[3],且易受传播介质和反射介质的影响,波束发散严重,方向定位精度较差;红外传感器具有光束发散小,定向精度高,响应速度快等优点,可提高系统的测距和定向精度。现有的测距机器人大多以单一的传感器为主,难免存在着测距误差,而且不能实现人机分离,作业场所及范围都具有一定的局限性。
为了解决移动机器人动态测距存在的缺陷,在对超声波及红外线原理研究的基础上,结合超声波与红外线的优点,设计了一款多功能、低成本、高稳定性、重复性好,可人机分离作业的复合测距系统。它以超声波传感器为主,进行测量,同时采用红外传感器来补偿超声测量的盲区。以Mega16L单片机为控制核心,设计了发送电路、接收电路、无线传输模块以及系统设计等。采用无线通讯技术将系统测得的数据传送到PC机上,实现无线动态测距。
1 测距原理
1.1 超声波传感器测距原理
超声波传感器是利用压电效应将电能和超声波相互转化实现测距的功能,其原理如图1所示。
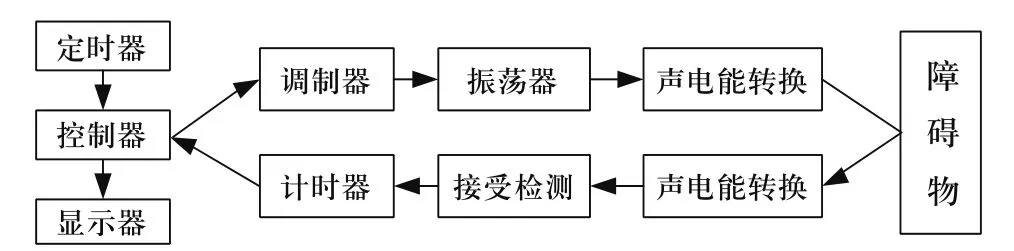
图1 超声波测距原理框图
超声波测距原理是通过检测超声波发射后遇到障碍物反射的回波[4,5],记录从发射到接收回波这一过程所用的时间t,然后计算出障碍物的距离S,距离计算公式为:

其中,c为声波在介质中的传输速率,S为障碍物与检测装置间的距离。在空气中超声波的传输速度易受空气中的温度、湿度、压强等因素的影响,其中温度的影响最大[6]。因此,计算距离时需要进行温度补偿。在已知温度T的情况下,超声波速度计算公式:

1.2 红外传感器测距原理
红外传感器包括红外发射器件和红外接收器件。红外传感器测距的基本原理为发光管发出红外光,通过判断反射光的有无确定前方是否存在障碍物,进而确定障碍物的距离[7]。
红外光电开关是目前使用较多的一种传感器,其发射频率一般在38kHz左右,探测距离较短。本测距系统采用的即为此种传感器。由于红外有发散性,常用红外测量障碍物,当发出信号后,碰到反射物被返射回,被测距仪接收到,由高低开关量在PC机上显示有或无,不需要复杂的处理。
2 系统总体硬件设计
超声红外复合测距的硬件系统主要由Mega16L单片机、超声波传感器、红外传感器、发送电路、接收电路、电源供电电路、无线收发电路等模块组成,布置在正前方的三个超声波和三个红外线传感器组成测距系统的测量部分,如图2所示。

图2 系统硬件示意图
系统以Mega16L单片机为控制核心,通过它来接收超声及红外传输来的数据,再利用无线传输把测量数据传到PC机,通过数据融合方法得到更加精确的数据。下位机设计的控制系统采用先进的实时操作系统,提高了系统的实时处理能力和工作可靠性。
3 硬件设计
3.1 传感器选择
超声波传感器都存在一定的测量盲区,同时超声测距还存在反射、噪声、交叉等问题。根据系统测距精度要求及传感器性能比较,采用美国SensComp公司的Smart Senor 600紧凑型超声波传感器。
基于红外传感器测距时存在的盲区问题,本设计中仅把红外测距作为超声测距的补充,用来补偿超声测距的盲区。所以选用的红外传感器的测距范围确定为超声波的测距盲区,约为0到0.5米。
3.2 发送电路设计
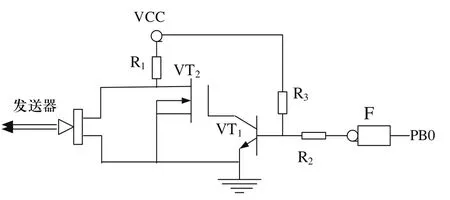
图3 发送信号电路
发送信号必须经过功率放大器才能驱动发送器,发送电路如图3所示,从ATmega16L单片机输出的信号经过缓冲器F和功率放大器(VT1、VT2)驱动发送器。VT1采用小功率晶体管,VT2可选功率场效应管。
3.3 接收电路设计
接收信号电路主要包括以下6部分:输入保护电路、阻抗匹配及电流放大器、两极电压放大器、带通滤波器、输出级放大器和电压比较器。
信号在传播过程中,其能量会随传输距离的增大而减小[8],从远距离障碍物反射的回波信号一般比较弱,经超声换能器变换为电信号后一般为 mv级,必须经过放大才能使用,接收换能器输出阻抗非常大,第一级放大电路必须有足够大的输入阻抗,所以采用高输入阻抗的运算放大器TL061型单运放。
电压比较器选用LM339(现仅用其中一路)。带通滤波器中的中心频率应与接收器的中心频率相同。调节电位器可改变接收灵敏度,提高抗干扰能力。常态下LM339输出高电平,当接收到超声波脉冲的第一个上升沿时就输出低电平,送至ATmega16L单片机的接收引脚,使内部定时器停止计数。红外传感器弥补超声波传感器较近测量的盲区,只发送接收信号即可,在上位机上显示有无。
3.4 无线传输模块
随着未来网络通信市场的成熟,无线技术将获得充分的发展空间,而在技术逐渐成熟和应用领域进一步细分的基础上,各种无线技术将在自身优势基础上得到更好的发展。本系统选用低功耗、高可靠性,体积小,重量轻的FC-201/SP微功率无线数传模块,故可采用单片射频集成电路及单片MCU,外围电路少,可靠性高,可以方便地嵌入用户的电路板上;连接PC机和下位机进行短距离无线数据传输。
FC-201/SP提 供了 TTL、RS232、RS485三种接口方式,本论文选择RS232接口方式。
3.5 测距系统总体设计
ATmega16L单片机的高速、高集成、高性能等优点,适合于要求速度快、精度高、扩展功能强、动态连续的超声波及红外测距系统。ATmega16L单片机是采用先进的RISC结构[9],超声、红外测距系统的很多功能均可由该芯片实现,针对测距系统的特点和要求,在超声波红外测距系统中使用ATmega16L单片机,可使系统所需扩展电路及芯片大大减少,从而使系统再扩展成为可能,而且具有线路简单、便于维护的优点,因而有利于提高系统得稳定性和可靠性。故可采用ATmel公司的Mega16L单片机做下位机进行超声波和红外两种距离探测传感器的数据处,具体如图4所示。

图4 基于ATmega16L单片机的检测电路图
超声波传感器与PA口相连,PB口与红外传感器相连。MAX232的R1IN和T1 OUT分别与PD0(RXD)以及PD1(TXD)相连。每次测距时,Mega16L单片机通过PA口与PB口接收超声及红外传感器传输来的数据,再由PD口传输到MAX232,并经其转化后,将数据传送给无线模块,利用无线通讯技术将数据传送到PC机上,实现上下位机之间的无线通讯,并在上位机上进行处理示,完成整个测距过程。当被测物体与传感器距离低于0.2m时,由于声波在空气中传输时间太短,接收芯片无法正常响应,则采取红外线测量。
4 实验结果与分析
在使用超声红外复合测距系统对前方障碍物进行检测时,20cm内的障碍物目标通过红外传感器探测完成,20~300cm之间的障碍物目标由超声波传感器探测完成。
为提高测量精度,数据采集的周期尽量选择的长一些,这样可以避免数据值得抖动,便于上位机进行读取。该系统在实际应用中,测量0~300cm范围内的距离时,其误差都在0~±2 cm之内,所测障碍物的测量距离与实际距离之间的误差有些偏大,为了进一步提高其测量精度,基于Bayes估计的数据融合方法,对所得数据进行数据融合处理,处理后得到的测量数据与实际值的误差为0~±1mm之间。
5 结论
本文以超声波传感器为主,红外传感器作为超声测量盲区补偿,设计了超声红外复合测距系统。克服了单一传感器测距系统的不足,使系统的测距精度和定向精度都有了一定的提高,进一步提高了测量精度,采用基于Bayes估计的数据融合方法对数据进行处理。利用无线通讯技术实现了上下位机之间的无线通讯以及人机分离操作,扩大了复合测距系统的应用范围,并具有良好的人机界面,利于数据的实时显示。测量误差由原来的±2cm降到±1mm。实际应用结果明,所设计的复合测距系统达到了设计要求。
[1] 李磊,叶涛,谭民,等. 移动机器人技术研究现状与未来[J]. 机器人. 2002. 24(5): 475-480.
[2] 曹小松,唐鸿儒,杨炯.移动机器人多传感器信息融合测距系统设计[J]. 自动化与仪表. 2009.5: 4-8.
[3] 刘升平,王剑,葛红.超声波测距系统的开发与研究[J].计算机工程与应用.2009.45(25): 78-81.
[4] 张春光.基于单片机的超波测距系统的设计[J].机床与液压.2008.36(7): 208-211.
[5] 仇成群,胡天云.基于超声波的汽车防撞报警系统的设计[J].制造业自动化.2009.31(4): 75-77.
[6] 杨振宇,李琳,陈文芗.一种微控制器的倒车雷达系统的设计[J].计算机测量与控制.2007.15(1): 68-70.
[7] 杜洪超,李邓化,高晶敏.基于超声和红外传感器的探测系统设计[J].微计算机信.2010.26(22): 95-99.
[8] 管彦滨,贺西平,樊安仓,等. 20kHz大距离超声测距仪硬件设计[J]. 陕西师范大学学报(自然科学版). 2009.37(3):47-50.
[9] 韩宇龙,於正强,赵安璞,等. 基于垂直双轴结构太阳能光电跟踪系统研究[J]. 半导体技术. 2010. 35(11): 1122-1125.
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
创新作文(1-2年级)(2019年4期)2019-10-15
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2017年7期)2017-06-05
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
