
基于DSP的电机轴频信号实时故障检测系统研究
2011-04-10 02:23李宏伟耿丽清吴兴利
制造业自动化 2011年14期
边 琰,李宏伟,耿丽清,郑 桐,吴兴利
BIAN Yan,LI Hong-wei,GENG Li-qing,ZHENG Tong,WU Xing-li
(天津职业技术师范大学 天津市信息传感与智能控制重点实验室,天津 300222)
0 引言
对电机故障判断系统而言,需要在非常短的时间间隔内完成对故障信息的检测和判断并适时地给出起点信号。在实际电机故障检测中,目标信号总是淹没在大量的杂波或干扰中,先进的故障诊断算法十分关键,故障诊断算法设计必须满足以下两点要求:1)实时性要求。能否及时检测到目标信号是至关重要的,只有及时地检测到目标信号,才能为跟踪、定位故障创造条件。因此故障诊断算法必须具有实时性,必须快速完成。2)低信噪比要求。故障判断系统接收到的信号往往是淹没在噪声中的微弱信号,即信噪比很小的情况下能够检测目标并给出起点信号。
随着对电机运行参数的深入研究,传统单片机已经不能满足运行复杂算法的要求。本文设计了基于TI公司(Texas Instruments Inc.德州仪器)数字信号处理TMS320F2812的电机故障实时检测系统,该芯片是32位高性能数字信号处理器,能够实现复杂数字信号处理算法的同时,具有丰富的外设资源,集成了高性能数字信号处理与微控制器,为电机系统故障检测与故障处理提供了一个较为理想的解决方案。实验表明,相对传统单片机检测系统,利用数字信号微处理器设计的检测系统不仅在速度上具有优势,还能实现二阶功率谱算法等较为复杂的分析方法,提高电机轴频信号实时故障检测的准确性。
1 电机故障检测算法原理
有效的电机轴频信号实时故障检测算法是电机故障检测的关键,本文以二阶功率谱算法作为检测算法对轴频信号实时检测。该方法的实现步骤如下:
1)在实际应用中,电场传感器将接收的电机信号转化为电信号,经过放大、滤波后对信号实时采集,将采样数据进行分段,每段为N(N=1)秒时间内采集到的数据,每两段之间有部分数据重叠;
2)求出N秒时间内数据的功率谱,将功率谱最大值和它附近两个点的功率谱值的平均值作为特征量,然后计算下一段数据的特征量;
3)求出前W段特征值后,将前W段特征量的平均值Pave的u倍作为阈值,若n时刻特征量Pn大于n时刻之前W时间内特征量的平均值的u倍,即Pn>u×Pave,则认为检测到目标一次,为防止由于干扰产生误检测,若在n+1时刻和n+2时刻,仍能检测到目标,即Pn+1>u×Pave,Pn+2>u×Pave,则故障诊断程序启动。
对采样数据进行滑动取值,由于以 次特征量的平均值作为阈值,可有效地去除实际数据中的随机成分,提高电机轴频信号实时故障检测的准确性。
2 实时检测系统结构与功能实现
2.1 系统总体结构
电机故障系统结构如图1所示:
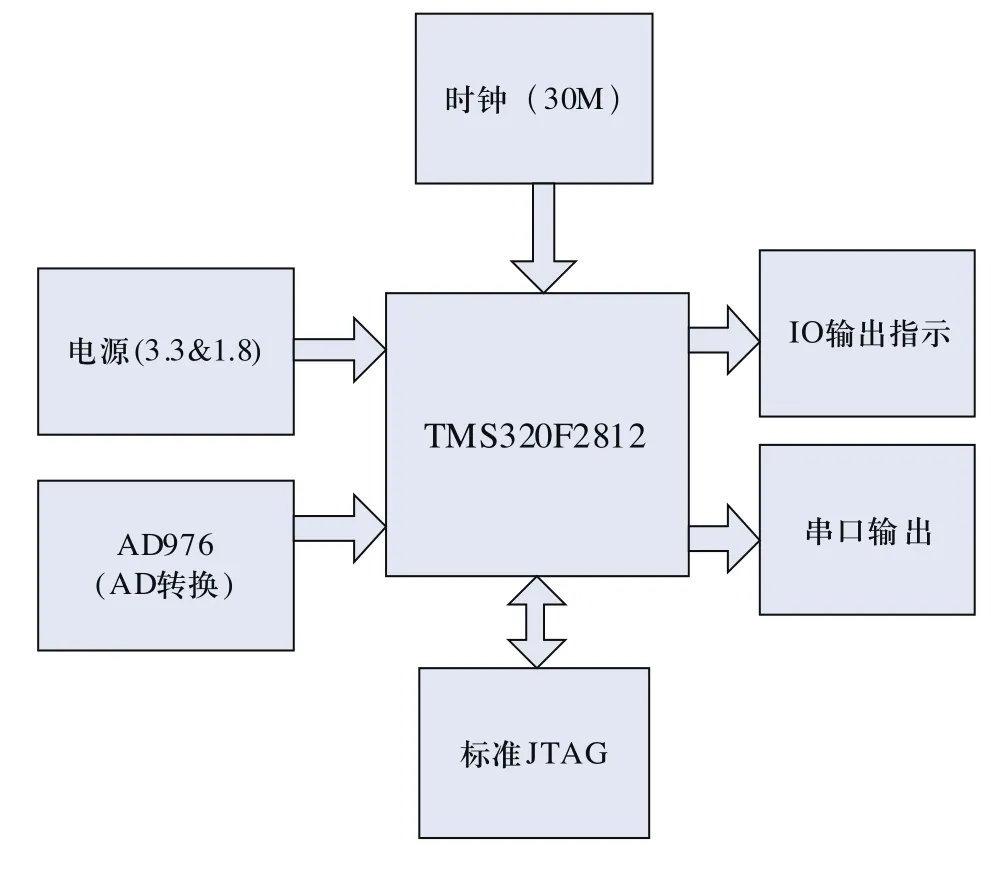
图1 系统结构图
系统主芯片DSP采用了TI公司的TMS320F2812,F2812是32位高性能精简指令集(RISC)CPU,是目前控制领域比较流行的处理器之一,芯片内核为32位C28x CPU,具有高达150MHz的工作频率和8级指令流水线。AD采集芯片采用 ADI公司的AD976,它是一种高分辨率16 位的AD转换芯片;输入范围为-10V~+10V,单极5V电压供电,采样率可达100K。AD976与DSP之间采用并行通信方式,16位的转换结果直接连到16位数据总线,DSP通过映射外部存储空间读取数据。

图2 系统实现流程图
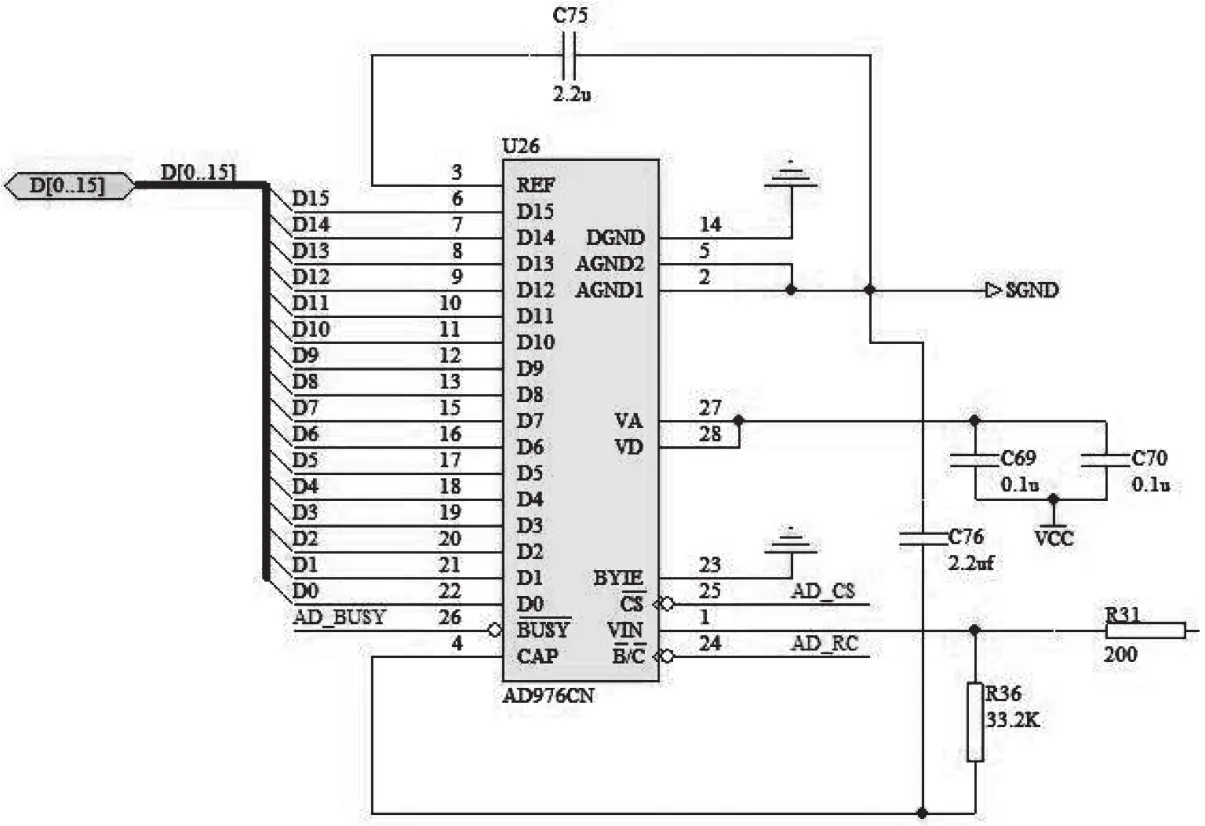
图3 AD转换电路图
2.2 系统功能实现
系统故障检测功能实现过程如图2所示。
2.2.1 AD转换的实现
AD 转换的实现电路如图3所示。
AD转换实现流程图如图4所示。
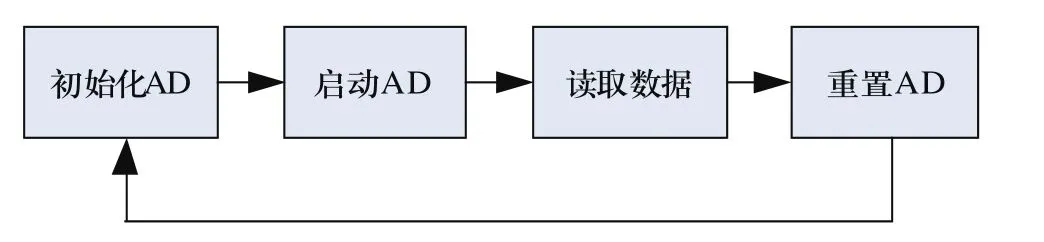
图4 AD转换流程图
AD 转换模块的实现主要包含初始化、启动、读取数据、重置AD四个步骤,其中初始化AD时,将CS,RC,BUSY引脚均置1,然后将CS,RC置0,稍微延时将BUSY置0,延时80ns后,RC置1,即启动AD,启动AD后,延时大概5us后,一次转换完成,将BUSY置1,数据在数据总线上可读,读取数据时,RC设为高电平,CS设为低电平。系统的采样率由定时器中断控制,在DSP的CPU工作在150M下时,设置中断频率为100,中断一次在中断函数中完成一次AD转换,即将中断频率设置为系统的采样率。
2.2.2 FIR低通滤波器的实现
数字滤波器相比模拟滤波器有更高的信噪比,更好的可靠性;IIR滤波器相对可以使用较少的阶数实现FIR的滤波效果,但 FIR 滤波器具体严格的相位特性,这是IIR滤波器不具备的。FIR滤波器的结构计算公式如(1)所示:

在DSP中复杂的滤波计算部分使用汇编代码实现,以提高程序的运行效率。
滤波器系数计算使用MATLAB数字信号处理工具箱中的滤波器辅助设计工具FDAtool获得,选择FIR滤波器选择相应参数后 使用tool下生成c头文件选项,生成的头文件系数即为滤波系数,可以实现相应的滤波效果。图5和图6是一个正弦混合信号通过一个100阶FIR滤波器的滤波效果对比图。其中,图5是频率分别为5Hz、8Hz和10Hz的正弦混合信号,在这个信号通过截止频率为6.5Hz的FIR低通滤波器后,输出信号中只保留了频率为5Hz的正弦信号,其他频率被衰减,取得了较好的滤波效果。因电机轴频信号频率也较低(一般小于5Hz),因而设计的数字滤波器能够满足系统要求。
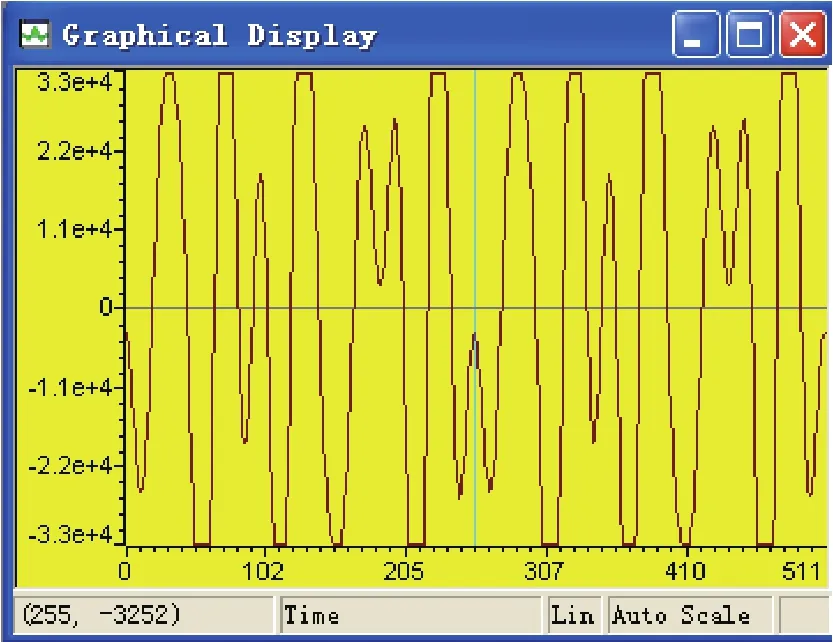
图5 正弦混合信号
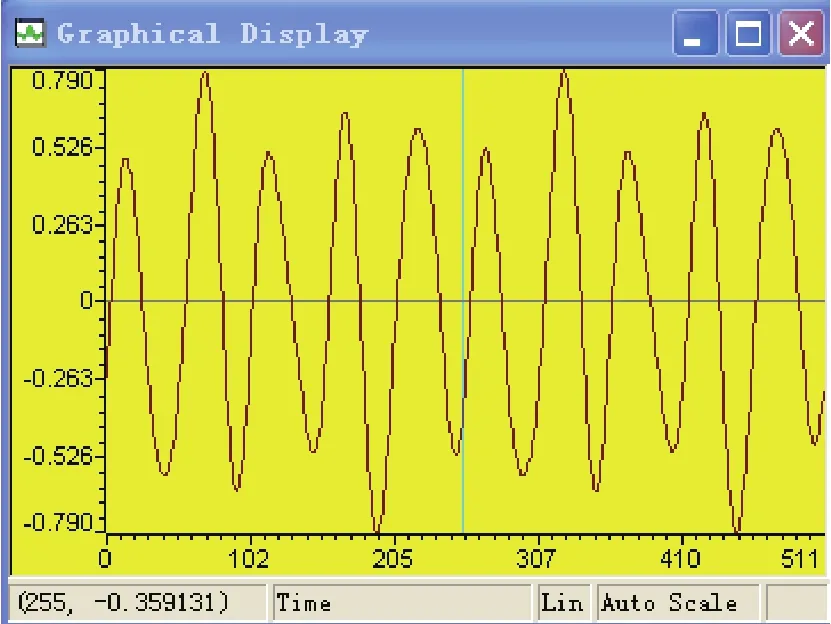
图6 通过滤波器后的输出信号
2.2.3 故障检测算法的实现
故障检测算法的关键是计算序列的二阶功率谱,系统中使用快速傅里叶变换(FFT)计算功率谱,使用TI提供软件工具包中为TMS320F2812专用的快速傅里叶变换的lib,该Lib中封装了FFT计算所需函数,最大能计算1024点傅里叶变换,考虑检测信号主要集中在低频部分,系统采样率不高,因此使用256点的傅里叶变换,计算的结果保存在MAG 数组中,通过对结果数组做出判断,将检测结果用于IO口控制,可以将故障的检测结果显示,并启动相应的应急方案。采集的一段数据的功率谱如图7所示。
由于对采样数据进行滑动取值,由于以W次特征量的平均值作为阈值,可有效地去除实际数据中的随机成分。阈值在每个时刻都是变化的,在故障出现时,曲线变化很明显,提高了故障特征的提取精度。
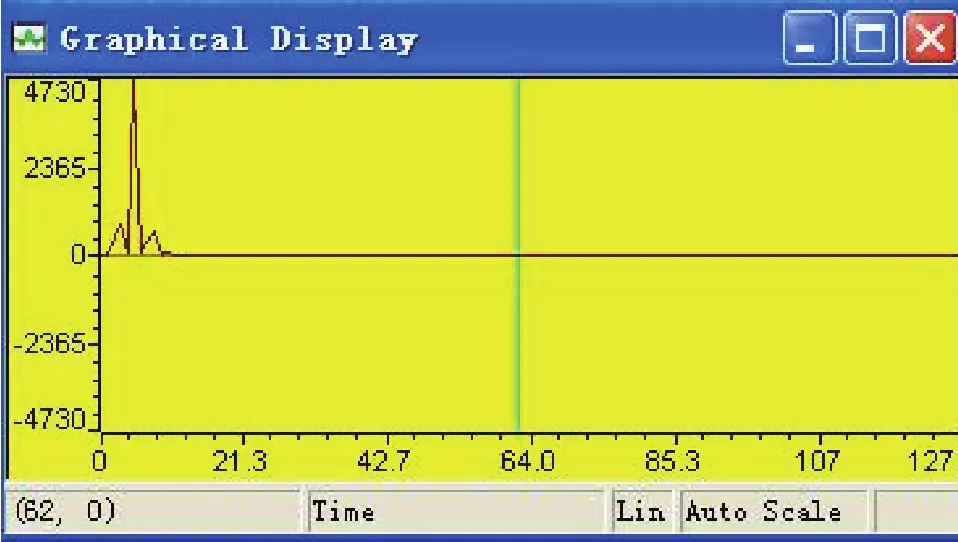
图7 采集数据的功率谱
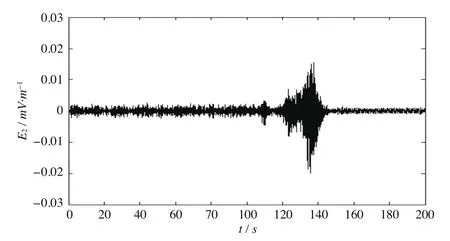
图8 轴频信号故障曲线图
3 结论
本系统使用32位高性能数字信号处理器作为电机故障检测、分析,相对传统单片机检测系统,不仅在速度上具有优势,由于数字信号处理器更具有优异数字信号处理能功能,能实现较为复杂的分析算法,在故障分析上同样可以做出详细诊断。同时,TMS320F2812还是一块高性能控制器,具有丰富的外设资源与通信端口,能方便控制外部设备作为应急方案,利用丰富的通信端口,可以实现远程控制功能。因此该方案具有很好应用前景与实用价值。
[1] 沈标正,电机故障诊断技术[M]. 机械工业出版社,1996.
[2] 王靖,王震洲,王静云,等. 基于DSP的电机断条故障在线检测系统设计[J]. 河北工业科技,2010,27(1): 1-3.
[3] 简远鸣,晏福平,刘念,等. 基于DSP 的高速数据采集与处理系统[J],微计算机信息,2009,25(2) : 130-132.
[4] 程佩青,数字信号处理教程(第三版)[M]. 清华大学出版社,2006.
[5] 张龙,李鹏飞,贺小伟. 基于TM S320F2812 高速数据采集系统的设计与实现[J]. 西安工程科技学院学报,2007,21(2): 219-221.
[6] 李靖,刘微,等. 基于Fourier变换的异步电机故障诊断研究[J]. 石家庄铁路职业技术学院学报,2010,9(3): 68-70.
猜你喜欢
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
能源(2016年2期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
