
声纳电子平台稳定及束控技术探仿
2011-04-03 02:00况贶吉雨冠刘超
船舶 2011年6期
况贶吉雨冠刘超
(1.海装驻上海地区军事代表局 上海 200083;2.中国船舶工业集团公司第七○八研究所 上海 200011;3.海鹰企业集团有限责任公司 无锡 214061)
声纳电子平台稳定及束控技术探仿
况贶1吉雨冠2刘超3
(1.海装驻上海地区军事代表局 上海 200083;2.中国船舶工业集团公司第七○八研究所 上海 200011;3.海鹰企业集团有限责任公司 无锡 214061)
声纳;电子平台稳定;束控;声基阵
介绍了声纳电子平台稳定及束控技术的一般实现方法,并针对声纳系统较常使用的声基阵——圆柱阵,分析了一种基于母线错层布阵的改进型电子平台稳定及束控方法。同时针对圆柱阵的不同成阵方式,对电子平台稳定及束控的效果进行模拟仿真。
0 引言
装载声纳的舰艇会因海上风浪的影响发生纵摇和横摇,这将使声纳波束偏离预定方向,造成性能下降、甚至丢失目标。传统声纳系统中采用机械平台稳定波束,但随着对声纳系统战术性能要求的不断提高,声纳基阵系统变得更复杂,基元数也大量增加,使得采用机械平台稳定波束的方法变得更加困难,而且也导致导流罩空间尺寸加大,降低了适装性。在数字波束形成系统中,可以较方便地利用计算机控制波束形成权系数,以保持波束的稳定,这种控制方法称为电子平台稳定。利用同样的原理,可以实现发射或接收波束的方向控制,这种方法称为束控。
本文给出电子平台稳定及束控的一般处理方法和过程;在此基础上给出基于母线错层布阵的改进型电子平台稳定及束控方法;最后给出圆柱阵的仿真结果,对比印证两种方法的优劣。
1 电子平台稳定及束控的一般方法
电子平台稳定及束控的关键是求出形成波束的各基元在波束指向参考坐标系中的位置。亦即求出各基元在参考坐标系中与波束形成参考点的声程差。这将涉及到声基阵所在舰艇平台坐标系和波束指向所在大地坐标系的相互转化,以及空间矢量与三维坐标系中参考点间距离的求解。
1.1 两种坐标系的变换
对于固定安装在舰艇平台上的声基阵,各个基元在舰艇平台坐标系XgYgZg中的物理位置是固定不变的。而波束指向的参考坐标系一般为大地坐标系XoYoZo。因此需要将大地坐标系XoYoZo中的波束指向转换到舰艇平台坐标系XgYgZg中来。这种转换是随着舰艇平台的摇摆而实时响应的。
设波束指向处于大地坐标系XoYoZo中,k号波束的俯仰角为φk。由于波束的水平指向与弦角相差一个航向角,为了表述方便,这里用弦角qk代替波束的水平指向。k号波束在大地坐标系中的方向以空间单位矢径表示,如图1所示。设基元处于舰艇平台坐标系XgYgZg中,OXg为舰艇平台艏艉线,YgOZg为舰艇平台肋骨面。

图1 波束指向与大地坐标系示意

1.2 基元相对波束指向参考点的声程差

对应声速c,相应的时间延迟τik为:

对于波长为λ的声波来说,对应的相移φik为:

为了在大地坐标系XoYoZo某一方向形成一稳定的波束,对每一个基元输出的信号所需的时间延迟或相位延迟。对于宽带波束形成而言,可以对基元输出信号进行延时dik、幅度加权后相加,得到波束形成的输出值。对于窄带波束形成或频率合成波束形成,可以对基元输出信号的不同频率分量分别移相φik、加权后相加,得到波束形成输出[1]。
1.3 对某型圆柱阵的仿真
针对已知圆柱阵,建立如图2所示舰艇平台坐标系。
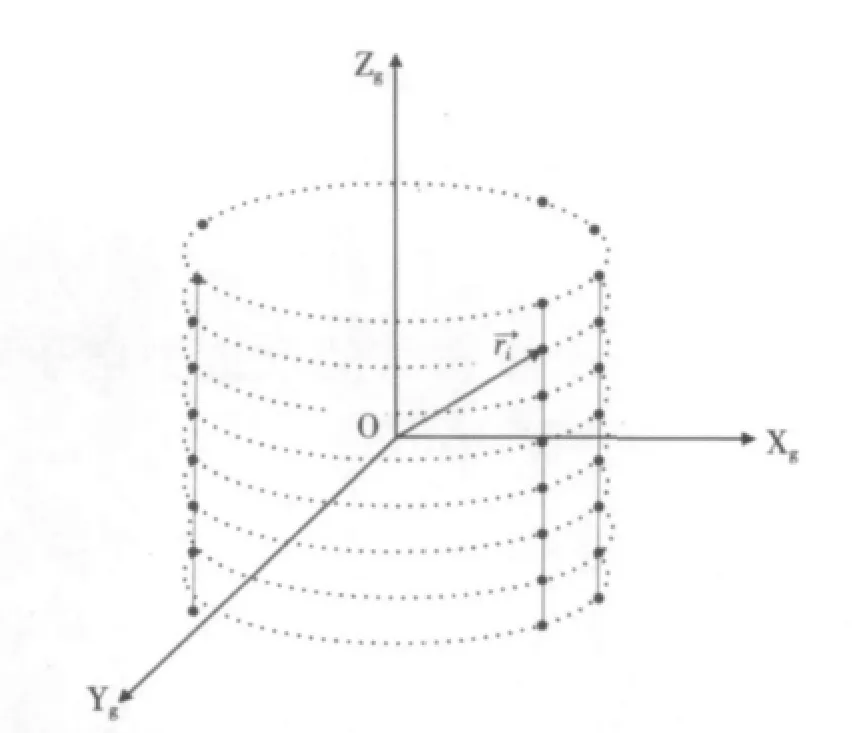
图2 圆柱阵在舰艇平台坐标系中位置示意
舰艇平台坐标系原点O与基阵几何中心重合,OXg轴与基阵母线相互垂直,OZg轴与基阵母线平行。由于基阵相对于舰艇平台坐标系的位置不变,所以可预先求出各基元的矢径模值和方向角余弦,存于结构表中,再根据导航信息中的纵横摇角度和预形成波束指向,即可求出实时变化的时延和相移值。
在上述公式中,很多变量都可以预先求得。实时计算时,更新一次纵横摇角度需计算12次乘法、5次加法、2次余弦、2次正弦;计算参与某个波束的一个等效基元相对参考点的时延τik,需要求4次乘法、2次加法。
依据1.1、1.2节的方法,采用时域波束形成法,得到母线8个基元分4层时波束形成的仿真结果,如图3。由该图可以看出,舰艇平台的摇摆或波束指向的俯仰,会使得波束的主瓣、旁瓣的幅值和指向发生变化。若母线分层数不够多的话,还会出现较大的栅瓣,影响波束形成的效果,进而影响声纳系统的功能和性能指标。这里不作详细讨论。

图3 仿真结果
2 基于母线错层布阵的改进型电子平台稳定及束控方法
圆柱阵是主动声纳系统普遍采用的声基阵成阵方式。本节将以圆柱阵为分析对象,给出一种基于母线错层布阵的改进型电子平台稳定及束控方法。
2.1 改进型电子平台稳定及束控方法分析
如图4所示,圆柱阵一般由水平360°方位内等间隔排列的M条线列阵构成,每条线列阵(母线)又由N个垂直方向上等间隔排列的基元构成。在圆柱阵声纳系统中,一般在水平360°方位内等间隔形成若干个波束,每个波束在垂直方向上的束宽和指向性由母线上的线列阵决定。若要实现电子平台稳定和束控,必须对母线上的基元进行分层。

图4 母线不同布阵方式圆柱阵局部示意图
根据线列阵波束形成原理,若波束在空间一个扇面内转动指向时,这个扇面的宽度实际上不是任意的,存在一个极限值。当扇面超过这个极限时,将会出现方位模糊[2]。若要避免这种模糊,则扫描的扇面宽度θs、声波波长λ以及基元间距d须满足:

可见,对于给定的声波波长λ,中心非模糊扇面的大小取决于基元间距d。以图4所示圆柱阵为例,对于给定的母线上基元间距和基元个数,若要增大垂直方向中心非模糊扇面,则基元分层越多越好,亦即各个分层上若干个基元组成的等效阵元间距越小越好。若母线上分层数为K,则声纳系统通道数将由M个变为M·K个。显然,这将使设备的规模和复杂度大大提高。
针对圆柱阵,改进型电子平台稳定及束控方法采用一种母线错层布阵的方法,使得圆柱阵在母线分层较少的条件下,也能取得常规布阵(母线等高)、母线分层较多时的效果。如图4所示,左侧图为母线等高布阵圆柱阵,右侧为母线错层布阵圆柱阵。
若母线上基元间距为d,8个基元分为4层、等效为4个等效阵元,则相邻等效阵元间距为2d。对于母线等高布阵的圆柱阵,母线水平展开后如图5a所示,各条母线上等效阵元的声中心处在同一水平面上。对于母线错层布阵的圆柱阵,母线水平展开后如图5b所示,相邻母线上等效阵元的声中心垂直距离为d,水平距离为r。若将相邻两条母线上等效阵元综合考虑,则可以近似认为等效阵元声中心垂直距离为因此,在垂直分层数相同的情况下,只要满足r<1.7d,依据公式5,母线错层排列的圆柱阵在垂直方向上中心非模糊扇面就会大于母线等高布阵的圆柱阵,亦即母线错层排列的圆柱阵的电子平台稳定效果和束控范围将优于母线等高排列的圆柱阵。

图5 母线不同布阵圆柱阵母线水平展开示意图
2.2 母线两种布阵方式下电子平台稳定和束控效果仿真
针对图4所示的圆柱阵,按本文第1节中给出的方法和计算公式,在相同条件下,分别对母线等高布阵和母线错层布阵的圆柱阵进行波束形成垂直方向上的仿真计算,得到如图6所示的仿真结果。
不难看出,在相同条件下,母线上8个基元分4层、错层布阵(图6c)时,电子平台稳定及束控效果和母线上8个基元分8层、等高布阵(图6a)时电子平台稳定及束控效果基本相当,仅在波束主瓣幅值、主旁瓣比上略有差别,但通道数减少一半。而在同等条件下,母线上8个基元分4层、等高布阵(图6b)时,电子平台稳定及束控效果明显不及图6a所示的效果[3]。由此可以得出,在母线上基元分层且错层布阵时,可以减少声纳系统的通道数,而获得较好的电子平台稳定及束控效果。
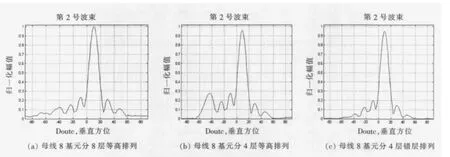
图6 相同条件下,母线不同分层和布阵方式下电子平台稳定和束控效果
3 结语
本文给出了声纳系统电子平台稳定及束控的一般计算方法,并针对圆柱阵,分析了一种基于母线错层布阵的改进型电子平台稳定及束控方法。需要特别指出的是,对于不同的声纳系统,在采用电子平台稳定及束控手段时,需要在1.1节所述坐标变换中,考虑舰艇平台摇心位置的影响。
第2节介绍的改进型电子平台稳定及束控方法,会使声纳系统预形成的多个波束极大值指向和理论值发生偏差。一般情况下,系统可以容忍这种偏差,也可以通过加权或另一种母线分层和母线错层布阵方式来纠正这种偏差。本文在此不作讨论。
[1]刘孟安.水声工程[M].浙江:浙江科学技术出版社,2002.
[2]田坦,刘国枝,孙大军.声纳技术[M].哈尔滨:哈尔滨工程大学出版社,1999.
[3](美)尤立克RJ著,洪申译.水声原理[M].哈尔滨:哈尔滨船舶工程学院出版社,1990.
Discussion on sonar electronic platform stabilization and shading
KUANG Kuang1JIYu-guan2LIU Chao3
(1.Military Representative Office of Naval Armament,Shanghai200083,China;2.Marine Design&Research Institute of China,Shanghai200011,China;3.Haiying Enterprise Group Co.,Ltd.,Wuxi214061,China)
sonar;electronic platform stability;shading;sonar array
This paper introduces the general technique of sonar electric stabilization and shading,and analyses a modified method based on bus bar stagger array for the cylindrical array,which is often adopted in sonar system.Meanwhile,the platform stabilization and shading effect are simulated for various arrangements of cylindricalarray.
U665.26
A
1001-9855(2011)06-0054-04
2011-06-08;
2011-06-21
况贶(1979-),男,汉族,工程师,研究方向:舰船及设备管理。
吉雨冠(1959-),男,汉族,高级工程师,研究方向:观通和作战系统研究。
刘超(1979-),男,汉族,工程师,研究方向:水声信号处理。
猜你喜欢
兵工学报(2022年2期)2022-05-22
兵工学报(2021年4期)2021-06-19
动漫界·幼教365(中班)(2021年3期)2021-04-06
考试与评价·八年级版(2020年5期)2020-10-29
兵工学报(2020年12期)2020-02-06
科学导报(2018年30期)2018-05-14
小雪花·成长指南(2017年4期)2017-06-12
小雪花·成长指南(2017年5期)2017-06-07
火控雷达技术(2016年2期)2016-02-06
棋艺(2014年2期)2014-05-23
