高功率因数整流器控制策略仿真研究
2011-03-19 03:43康尔良曹亮亮
黑龙江大学工程学报 2011年1期
康尔良,曹亮亮
(哈尔滨理工大学 电气与电子工程学院,哈尔滨 150080)
0 引 言
整流器作为各种电力电子装置与电网的接口,其发展方向是将变流技术与微电子技术和自动控制技术相融合,实现对电网无污染的 “绿色”电能变换。随着电力电子装置的广泛使用,由此引起的谐波污染问题逐渐受到了人们的重视。目前,大部分的电力电子装置所使用的直流电源是通过不控整流或相控整流得到的,这些功率器件大多工作在开关状态,设备在运行中对电网注入了大量的谐波和无功,造成了严重的电网污染[1-3]。传统的二极管不控整流和晶闸管相控整流有许多不足[4]。整流装置是谐波主要的来源,因此有必要研制高功率因数、低谐波整流器以降低谐波污染,并满足功率控制系统的高性能、高效率、高稳定性等要求。
将PWM(Pluse Width Modulation)控制技术[5]与整流技术结合在一起,形成的新型整流器称为PWM整流器。PWM控制技术应用于整流器始于20世纪70年代末。国内外已发表了大量研究报告并从不同方面对可逆PWM整流器技术作了深入而全面的研究,PWM整流器技术日趋成熟[6]。可逆PWM整流器由于能量可双向传输及其优越的控制性能,近年来在电力电子装置中获得了广泛应用,并受到学术界的关注[7-9]。采用PWM整流可获得单位功率因数和正弦化输入电流。与相控整流相比,PWM整流器对电容、电感这类无源滤波元件或储能元件的需求大大降低,动态性能也有很大的提高。本文根据PWM整流的原理和结构特点,应用矢量脉宽调制的控制策略,在Matlab2009b/ Simulink软件上搭建仿真平台,仿真结果验证了文中控制系统设计的可行性。
1 电压型PWM整流器数学模型
三相电压型 PWM整流器 (Voltage Source Rectifier,VSR)主电路拓扑结构见图1。
网侧电路采用对称的三相三线制结构,功率开关管采用全控型器件IGBT和续流二极管并联组成。其中Ek(k=a,b,c)是交流侧电源相电压, ik为交流侧电源相电流,Lk是交流侧滤波电感, Rk是交流侧电感寄生电阻,C为直流侧滤波电容。考虑到电路对称性,令L=Lk,R=Rk。假设IGBT和二极管均为理想器件。
设三相电网电源时域表达式为:


图1 三相电压型PWM整流器拓扑结构Fig.1 Main circuit of three-phase voltage source PWM rectifier
定义整流器的逻辑开关函数sk为:
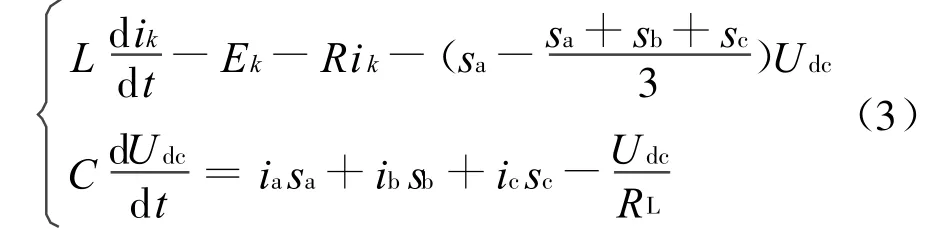
根据图1所示的三相电压型PWM整流器的主电路结构,由基尔霍夫定律可以得到三相静止坐标系abc下的开关函数数学模型如式(3)所示。
在abc坐标系下三相电压型PWM整流器交流侧均为时变量,不利于控制系统设计。可以通过坐标变换将三相静止坐标系abc转换成以电网基波频率同步的两相旋转坐标系dq。经过变换,三相坐标系中正弦量为
将变成两相旋转坐标系中直流量,从而简化控制系统设计。运用三相对称静止坐标abc到两相旋转坐标系dq间的变换矩阵

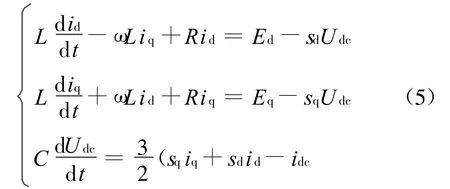

图2 两相旋转坐标系中三相电压型PWM整流器模型结构Fig.2 Three-phase voltage source PWM rectifier model structure on two-phase rotating coordinate system
2 双闭环PI调节器设计
PID调节器中有比例积分PD、比例积分PI、比例积分微分PID 3种类型。PD调节器构成超前补偿,可以提高系统的稳定性与动态响应,但系统精度较差。PI调节器构成滞后补偿,可以提高系统稳定性,但系统动态响应速度较PD慢。PID调节器可实现超前与滞后补偿,包括了PD与PI两者的优点,可以全面提高系统性能,但具体实现与调试复杂。一般系统都以系统稳定性和系统精度为主要调试目标,为简化系统设计,本文采用双闭环PI控制结构设计三相电压型PWM整流器,即电压外环和电流内环。电压外环控制主要获得稳定的直流输出电压,电流内环是电压外环的输出指令进行电流控制,提供高品质的电流响应,实现单位功率因数控制。
2.1 电流PI调节器设计
电流内环由于对称性,dq坐标系下两环电流控制方法相同,故只设计一环即可。因此,下面以的控制为例设计电流调节器。考虑到电流内环采用延时和PWM控制的小惯性特性,按典型Ⅱ型系统设计的电流内环简化结构见图3。其中KiP,KiI分别为电流PI调节器的比例和积分系数,且KiP为PWM开关周期,KPWM为PWM等效增益。

图3 电流环控制结构图Fig.3 Diagram of the current control loop

以PI控制器零点抵消电流控制对象传递函数的极点校正后,即τi=L/R,电流内环的闭环传递函数Φ(s)变成典型二阶系统:

传统组操作步骤与超声刀组基本一致,术中主要采用单极电刀切割术区的肌肉、脂肪组织等,用电刀电凝止血、血管钳钳夹或丝线结扎。
2.2 电压环PI控制器设计
在进行电压环设计时,假设电流环已实现完全跟踪。参照文献 [7-8]电压环可设计如图4,设电压环采用时间常数,图中,分别为电压环PI控制器的比例和积分系数,且τv。

图4 电压环控制结构图Fig.4 Diagram of the voltage control loop
按典型Ⅱ型系统设计电压PI控制器,电压环开环传递函数为:


在考虑系统跟随性和抗扰性的同时,工程上中频宽h一般取5,代入式(9)中,可得到电压环PI控制器参数。电压环的调节速度不能太快,否则正常电压输出波动会加深电流畸变。为保证电压环带宽小于电流环,实现电流完全跟踪,一般取电压环的开环宽度小于开关频率的1/5。
综合以上各式,dq坐标系下变量已实现解耦,可得到三相电压型PWM整流器的控制系统,见图5。
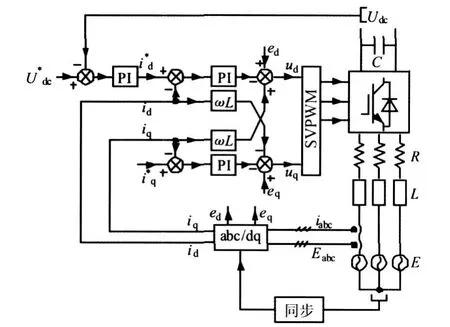
图5 三相PWM整流器控制系统Fig.5 Control system of three-phase PWM rectifier
3 Simulink仿真实验
系统在离散模型由下可变步长算法ode23tb采样,步长幅值5e-5,仿真时间0.7 s,在0.3 s时另并联电阻8 Ω,仿真得到的波形输出见图 6~图8。

由图6和图8可见,系统从0.02 s开始进入整流状态,在0.1 s以后整流电压稳定在325 V,整流电路稳定在20 A。由图7可见,此时网侧相电压和相电流为正弦波且达到同相位。图9表示整流后功率因数波形,系统进入整流状态后,实现了单位功率因数控制。在0.3 s突然增加负载,负载电阻值由原来的16 Ω再并联一个同样的负载。整流电压由于PI控制器的调节,在0.5 s以后重新稳定在325 V,相电流很快恢复正弦波状态,功率因数也很快恢复1。

图9 功率因数波形Fig.9 Power factor waveforms
整流电流跃变为40 A,系统输出功率增加一倍,图10与图11所示为负载变化前后相电流频谱分析,此时谐波总畸变率T HD由3.41%降为2.87%。验证了文中所设计的PWM整流器系统具有良好的系统鲁棒性与快速动态响应。

4 结 论
由仿真实验结果可见,采用SVPWM调制和双闭环PI控制器设计的三相电压型PWM整流器,可以实现单位功率因数控制。仿真实验波形表明本文设计的电压型PWM整流器在实现快速跟踪的同时,保证了系统的抗扰性。该设计方法为工程实际应用中提供了参数运算依据,如柔性交流输电,可再生能源并网发电等。
[1]王兆安,杨 君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998:325-348.
[2]张文斌,勒 希.12脉波整流电路MAT LAB Simulink仿真及谐波分析 [J].华东电力,2008,34(4): 70-72.
[3]G.Narayanan,Rajapandian Ayyanar.Space Vector Based Hybrid PWM Techniques for Reduced Current Ripple[J].IEEE T ransactions on Industrial Electronics,2008,55(4):1 614-1 627.
[4]易 娜,唐雄民.不可控整流回路参数优化设计的研究[J].电力电子技术,2007,41(1):90-91.
[5]王兆安,黄 俊.电力电子技术:第4版 [M].北京:机械工业出版社,2008:150-169.
[6]武志贤,蔡丽娟.三相高功率因数整流器的研究现状及展望[J].电气传动,2005,35(2):3-7.
[7]张 兴.PWM可逆变流器空间电压矢量控制技术的研究[J].中国电机工程学报,2001,21(10):102-109.
[8]张崇巍,张 兴.PWM整流器及其控制[M].北京:机械工业出版社,2003:123-125.
[9]徐金榜.三相电压源PWM整流器控制技术研究[D].武汉:华中科技大学,2004:11-19.
[10]陈伯时.电力拖动自动控制系统—运动控制系统:第3版[M].北京:机械工业出版社,2009:165-184.
猜你喜欢
科学家(2021年24期)2021-04-25
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
电源技术(2015年1期)2015-08-22
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年12期)2015-04-09
电测与仪表(2015年3期)2015-04-09