
基于模糊控制的料浆湿度自动控制方法探讨*
2011-03-17 10:32夏国宏
湖北理工学院学报 2011年3期
夏国宏
(黄石理工学院机电工程学院,湖北黄石 435003)
0 引言
在球磨机制备料浆的生产过程中,料浆的湿度(或料浆的水分含量)是一个十分重要的工艺参数。料浆的湿度过低会产生“糊磨”现象,此时球磨机功耗增加,产量下降,并且磨制成的材料细度达不到要求。如果料浆的湿度过高,细物料因水分较多包在研磨体的表层,这样就会减少钢球对物料的撞击力,容易产生“空磨”现象,这不但会减少球磨机的产量,而且也会加速球磨机中研磨体的磨损。总之,控制料浆的湿度在工业生产中有着十分重要的意义[1]。
在球磨机制备料浆的生产过程中,影响料浆湿度的因素有很多。料浆湿度具有非线性、惯性大、纯滞后的特点,难以建立精确的数字模型,但运用模糊控制就可以取得较好的效果。
1 自组织模糊控制理论
模糊控制,就是在被控制对象的模糊模型的基础上,运用模糊控制器的近似推理等手段,实现系统控制的一种方法。模糊模型是用模糊语言和规则描述的一个系统的动态特性及性能指标。在模糊控制系统中,模糊控制器的推理机理是由人们对生产过程或对象的模糊信息归纳后产生的控制规则确定的[2]。但是由于人们在对生产过程或对象进行经验总结时认识上的偏差以及总结方法不合适等因素的影响,且生产过程或对象是随着外界条件和本身的条件而有所变化的,这 2种情况促使人们考虑一种可以在运行中能自动对本身的参数进行调整,使系统的性能不断改善,以适应不断变化的情况,保持控制达到最佳效果的方法。
为了达到最佳的控制效果,可以采用对性能测量的校正、对控制量的校正以及对控制规则的校正 3种方法来实现。在料浆湿度模糊控制方案中,我们采用对控制规则的校正来改变模糊控制表,进行自组织自调整。图 1为双因子自组织自调整模糊控制系统。
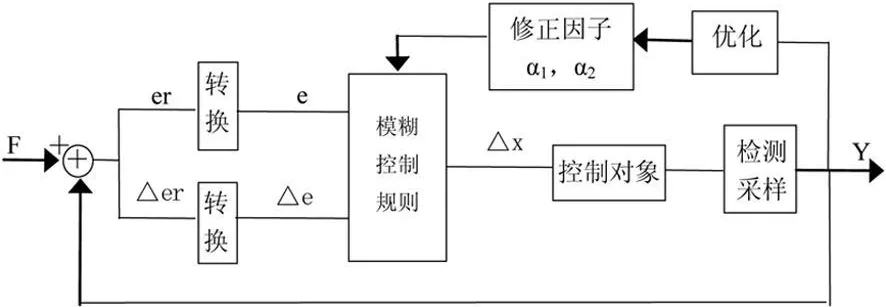
图1 双因子自组织自调整模糊控制系统
在图 1中,α1和 α2是修正因子。对常规的模糊控制表可按式(1)进行调整:

从式(1)可以看出,α1和 α2取值不同时,控制规则必不同,控制效果就有所不同。在实际运行中,不断修改 α1和 α2的值,就可以找到最优控制规则[3]。
2 预测控制理论
根据球磨机生产的实际情况,可以作出一些假定,运用自校正预测补偿控制(STPCC),可以取得较好的控制效果。自校正预测补偿控制方法比较适合于大滞后系统[4]。自校正预测补偿控制(STPCC)的算法如下:通过对输出平均值的预测和控制,计算出目标控制值,使其与设定值之间产生一个人为的差值,并利用这个差值自动地校正和补偿预测误差。再根据控制目标值与设定值之间的关系式确定最佳控制量。目标控制值与设定值的差值一般比较小,但事实上在生产过程中球磨机料浆的水分含量变化有时会很大,仅仅控制球磨机中料浆的水分含量无法达到使料浆池中总的水分含量也能达到要求的目的。
因此,我们采用的研究方法是将多因子自组织自调整模糊控制与自校正预测补偿控制结合起来解决球磨机料浆湿度的控制问题。
3 料浆湿度的模糊控制方法
要提高模糊控制器的精度,一方面可以设计多维模糊控制器,从理论上讲,模糊控制器的维数越高,控制越精细,但是维数越高,模糊控制规则会变得更加复杂,控制算法的实现相当困难;另一方面,可以采用多因子自组织自调整模糊控制,如可以采用双因子自组织模糊控制,还可以增加到 4个调整因子,文献[3]中提出了 6因子调整模糊汽车模型,随着调整因子的增加,控制系统的阶跃响应特性将随之改善。但随着调整因子的增加,模糊控制规则和计算量也大大的增加,算法的实现也将加难,程序将变得更加复杂。解决这个问题的另一种方法是在偏差 e和偏差变化率△e的论域内用不同的控制模式分区间来实现控制,即采用复合型模糊预测控制方法[5]。
复合型模糊预测控制方法,一是在大偏差范围内,如偏差 e和偏差变化率△e分别在{±6,±2}范围内,可以采用双因子自组织模糊控制,在更高的控制精度要求时,可以采用4因子自组织模糊控制,在小偏差范围内,如偏差e和偏差变化率△e分别在{±2,0}范围内采用自校正预测补偿控制,二者的切换可以通过软件来实现,这样程序设计就比较简单。
因为切换工作模式时,偏差 e和偏差变化率△e的范围不同,所以这 2种工作模式可以分别进行设计和调试。切换点的设定是关键。从双因子自组织模糊控制模式到自校正预测补偿控制模式,切换点要选得恰当,如果太小,就会过早地进入自校正预测补偿控制而影响系统的响应速度;反之如果选得太大,在太接近目标值时切换,会有引入模糊控制器不能消除系统静态误差的缺陷。因此要找到一个相对最优点,或者根据系统的特点要求来选取。根据专家经验,在从双因子自组织模糊控制模式到自校正预测补偿控制模式切换时,可选在偏差e和偏差变化率△e分别为{±1,0}时,切换至自校正预测补偿控制模态。
4 料浆湿度模糊预测控制方案研究
料浆湿度模糊预测控制研究的总体方案如图2所示。
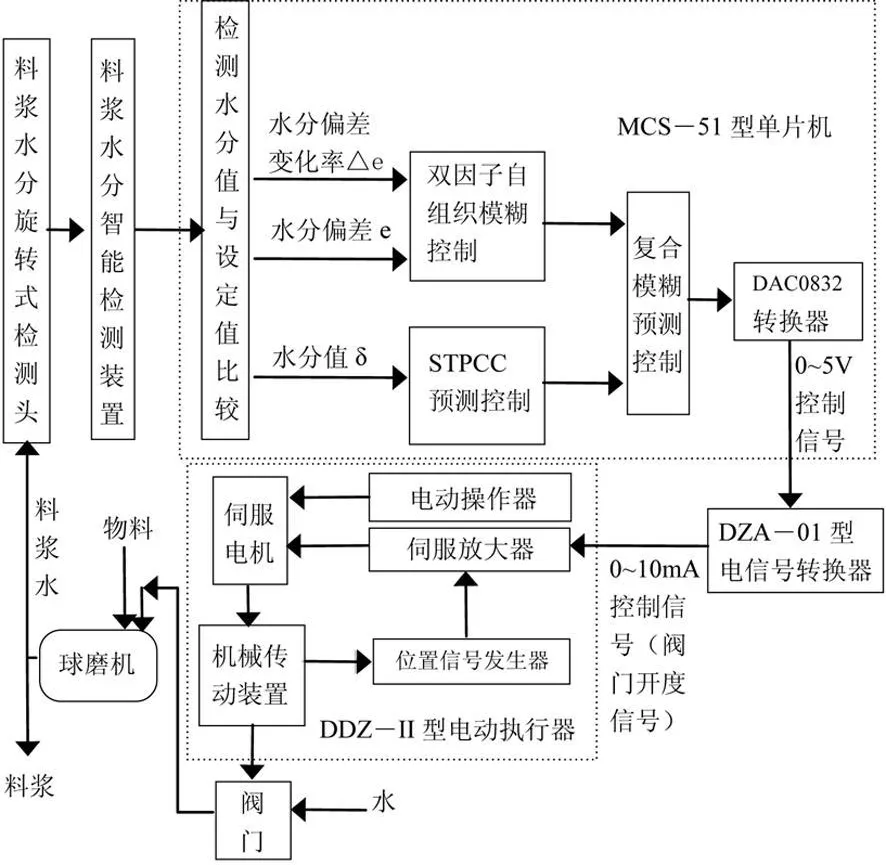
图2 料浆湿度模糊预测控制方案图
料浆湿度预测模糊控制方案工作原理:
第1步:单片机8031接受AD 574传来的数字信号并进行数据处理,求出偏差 e和偏差变化率△e,然后根据偏差e和偏差变化率△e的大小,决定是工作在多因子自组织模糊控制状态,还是工作在自校正预测补偿控制状态。通过查询对应的模糊控制表求出模糊控制量△x,最后单片机将送来的模糊控制量△x送给DAC0832转换器。
第2步:DAC0832转换器进行D/A转换,把该模糊控制量△x的数字信号转换成模拟信号[6]。
第3步:由DAC0832转换器给出的直流电压控制信号,经电信号转换器转换成电流控制信号。通过伺服放大器和伺服电机来控制阀门,从而正确地控制给水量。
5 结论
针对料浆湿度这样具有非线性、惯性大、纯滞后的特点且难以建立精确的数字模型的对象,采用复合型模糊预测控制方法,相对于多因子自组织模糊控制和自校正预测补偿控制来说,程序将变得简单,算法也比较容易实现,同时还可以取得较好的控制效果。
[1] 夏国宏.料浆水分自动测控仪的研制与应用[J].仪表技术与传感器,2006(10):15-17
[2] 李洪兴.变论域自适应模糊控制器[J].中国科学:E辑,1999,29(1):32-42
[3] 尹念东,余群.六因子调整模糊汽车模型的研究[J].农业机械学报,2003,34(1):25-27
[4] 夏国宏,张林仙,张立民.料浆水分含量的自校正预测补偿控制[J].黄石理工学院学报, 2006,22(6):32-34
[5] 郝晓弘,粘坤,张帆,等.模糊预测控制在新型干法水泥生产线的应用[J].计算机仿真,2010, 27(5):281-283
[6] 胡乾斌,李光斌,李玲,等.单片微型计算机原理与应用[M].武汉:华中科技大学出版社,2005
猜你喜欢
防爆电机(2022年2期)2022-04-26
湖南电力(2021年4期)2021-11-05
初中生世界·九年级(2020年9期)2020-09-21
石油化工建设(2019年6期)2020-01-16
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
电测与仪表(2016年14期)2016-04-11
通信电源技术(2016年5期)2016-03-22
地震地质(2015年3期)2015-12-25
新疆钢铁(2015年1期)2015-11-07
