
采用 SMA驱动的小型空间磁悬浮飞轮锁紧机构
2011-03-16 09:20闫晓军张小勇聂景旭
北京航空航天大学学报 2011年2期
闫晓军 张小勇 聂景旭
(北京航空航天大学 能源与动力工程学院,北京 100191)
张绍卫
(北京控制工程研究所,北京 100094)
采用 SMA驱动的小型空间磁悬浮飞轮锁紧机构
闫晓军 张小勇 聂景旭
(北京航空航天大学 能源与动力工程学院,北京 100191)
张绍卫
(北京控制工程研究所,北京 100094)
磁悬浮飞轮锁紧机构在卫星发射时锁紧飞轮,减小其振动和冲击载荷;在发射后解锁,保证飞轮正常工作.目前已有的以火工品或步进电机驱动的锁紧机构具有冲击大、体积较大、不可重复使用等缺点.提出了一种采用形状记忆合金(SMA,Shape Memory Alloy)驱动的空间磁悬浮飞轮锁紧机构的设计方案,并在 Liang本构模型的基础上发展了机构驱动单元的设计方法.之后,完成了锁紧机构的样机研制和调试,并开展了地面的性能测试、振动试验和高温环境试验.研究结果表明:SMA锁紧机构安装体积小,在星载 28V电压下能在 6s内完全锁紧,在 1s内完全解锁,并能够通过振动和环境实验.SMA驱动的磁悬浮飞轮锁紧机构具有锁紧力大、同步性好、可重复使用、低冲击、无污染等优势,有很大的工程应用潜力.
形状记忆合金;磁悬浮飞轮;空间锁紧机构;本构模型;设计方法
目前,磁悬浮飞轮以其优越的控制精度和高可靠性从卫星姿态控制机构中脱颖而出[1-2].由于自由悬浮的需要,磁悬浮飞轮的静子和转子之间存在缝隙.因此就需要锁紧机构在发射时消除间隙、顶紧转子,减小磁悬浮飞轮在发射环境下的所受的振动和冲击载荷;在发射后通过指令解锁,使磁悬浮飞轮能正常工作.通常情况下,磁悬浮飞轮在真空环境里工作,因此,要求锁紧机构在工作状态变换时不能产生多余物;此外,磁悬浮飞轮一般多在小型卫星上使用,用于安装锁紧机构的空间比较狭小,要求机构的体积不能过大;如果为了减小单个锁紧机构的载荷而采用多个锁紧机构,则要求锁紧机构有很好的同步性(同步性是指 2个机构解锁时间或者锁紧时间的差值,时间差越大,说明同步性越差,反之则越好).可见,为了保障磁悬浮飞轮可靠工作,其配套的锁紧机构必须能够承受高负荷,并且具有可重复作动、体积小、作动时间短等特点.目前,国内外锁紧机构的驱动源主要用 2种,一种为火工品,另一种为电机,这也是目前航天机构中使用最多的 2种驱动源.
火工品驱动的锁紧机构以德国发展的利用火工品充气装置驱动波纹管[3]来实现锁紧的锁紧机构最有代表,该机构由充气系统和作动系统组成,通过充气系统对作动系统进行驱动,实现锁紧功能.由于需要火工品充气系统进行驱动,使得该机构在作动时不可避免的会产生冲击、生成污染性气体,而且只能一次作动;另外,当卫星和磁悬浮飞轮进一步小型化时,此类锁紧机构由于安装体积较大,限制了它的进一步使用.电机驱动以国内同济大学提出的磁悬浮飞轮自动锁紧系统[4]最有代表,该方案主要采用步进电机驱动螺杆-螺母结构来完成空间锁紧功能,该方案结构比较简单,可靠性高,但电机的扭矩较小,不能直接提供足够的锁紧力,需要变速系统减速以增加扭矩,使得体积相对增大,锁紧时间增长.无论是火工品驱动的充气方案还是电机驱动方案,当磁悬浮飞轮进一步小型化时(小型磁悬浮飞轮直径为 100mm左右),这 2类锁紧机构相对较大的体积将会严重制约其应用.
形状记忆合金(SMA,Shape Memory Alloy)是最近几十年内发展起来的新型智能材料,与一般金属材料相比,具有许多独特的力学和物理性能,其中最重要的就是形状记忆特性(SME,Shape Memory Effect)和超弹性性能[5].本文提出利用 SMA的记忆特性来设计一种新型的空间磁悬浮飞轮锁紧机构(以下简称 SMA锁紧机构).SMA的“形状记忆特性”是指:材料被拉伸变形,卸载后其变形不能完全回复留有残余变形,但是只要对其加热到某一温度之上,则变形消失,回复到原来的形状.当有约束阻止其回复时,SMA就会产生很大的回复力,以 NiTi合金为例,当其预变形量达到 8%时,对其加热,它最大能产生约600MPa的回复应力[6].此外,SMA丝的电阻很大,可以直接给其通电来加温,所需的电流和电压条件和目前航天器上的供电条件能够兼容,使得其特别适合在航天器机构设计中使用.
1 结构设计
1.1 设计目标
典型的磁悬浮飞轮结构如图 1所示,转子 2通过轴承 3安装在定子 4上,而定子 4连接在基座 1上,轴承和转子之间存在一个很小的间隙(此次研究中的间隙为 0.2mm).利用形状记忆合金设计锁紧机构,存在以下几个难点:
1)在发射过程中,飞轮可能在 3个方向(x,y,z)振动载荷都很大,可能达到几十个重力加速度,因此,要求锁紧机构能够在消除间隙的同时,能够在 3个方向上提供支撑力,以克服来自各个方向上的大载荷.
2)完成飞轮的锁紧和解锁,需要 SMA作动,而 SMA的作动距离和本身的总长度相关(一般最大为总长度的 6%~7%左右).为了确保飞轮在解锁状态旋转可靠,要求完成锁定和解锁需要的作动行程较大,即:SMA丝有较长的安装空间,但实际的安装空间狭小,需要采取特殊的 SMA“绕线”方式和结构设计措施.
3)当载荷较大,需要采用多个机构同时完成锁紧工作时,要保证多个机构工作的同步性.
4)SMA锁紧机构尽可能只安装在飞轮和基座(如图 1所示)之间的狭小空间中.

图1 磁悬浮飞轮结构示意图
1.2 方案设计
为达到设计目标,本文提出了图 2所示的SMA锁紧机构方案,机构工作时的解锁功能和锁紧功能分别由解锁驱动单元和锁紧驱动单元交替工作来完成.为了减小每个 SMA锁紧机构的载荷,采用 4个机构均布在飞轮下面的设计方案,如图 3所示,共同实现飞轮的锁紧和解锁.
解锁驱动单元由楔块 4,弹簧 3,SMA丝 2,构成,锁紧驱动单元由楔块 5,弹簧 6,SMA丝 8构成.SMA锁紧机构的工作原理为:图 2是解锁状态,图 4是锁紧状态,当锁紧指令发出后,对 SMA丝 8通电,SMA丝 8收缩,将楔块 5拔出,同时压缩弹簧 6,这时楔块 4在预压缩的弹簧 3作用下,向右运动,将 SMA丝 2拉伸,同时将弹性爪 9顶起,完成对飞轮的锁紧.当解锁指令发出后,对SMA丝 2通电,SMA丝 2收缩,将弹簧 3重新压缩,同时将楔块 4拉回,弹性爪 9随之下落,解除对飞轮的锁紧.当楔块 4运动到特定的位置时,楔块在弹簧的作用下掉入楔块的槽中,将楔块锁住,完成机构的一个完整的工作过程.
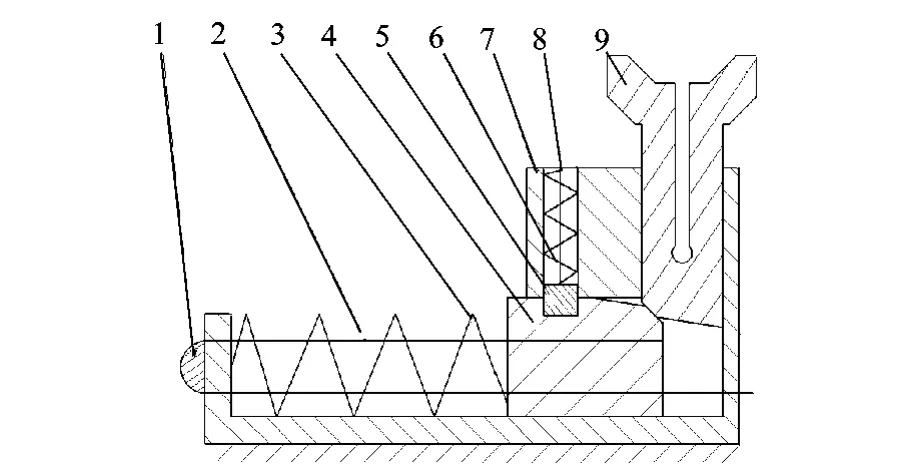
图2 SMA锁紧机构工作原理示意图

图3 SMA锁紧机构分布图
在机构设计中,还采取了多处新颖的结构设计.根据上面的技术难点,归纳如下:
针对 SMA锁紧机构要同时承受来自 x,y,z 3个方向的振动载荷的技术难点,本文设计了弹性爪进行支撑,如图 2中 9所示.弹性爪中间开槽,在支撑时可以通过自身形变的自适应调节,使得两爪都很好的对轮缘进行支撑.将 SMA锁紧机构按照如图 3所示的分布,安装 4个 SMA锁紧机构后就可以提供x,y,z3个方向的支撑力.为了保证弹性爪支撑不发生松动,本文将弹性爪楔角 β控制在自锁角范围内,如图 4所示.

图4 锁紧状态图
针对过长的 SMA丝在狭小的空间中安装的问题,本文通过采用“分段斜面”和特殊的 SMA丝绕线方案来解决.“分段斜面”是指将弹性爪和楔块的接触面设计成 2个斜率不同的斜面,如图4所示,大角度斜面用于消除弹性爪和轮缘之间的空程,小斜面用于实现自锁.大角度斜面的设计可以有效减小了 SMA丝的作动距离,从而减小SMA丝的安装长度,减小锁紧机构的体积.另一方面在结构设计中采用了绝缘滑轮来绕 SMA丝(见图 2),也使其安装空间缩小了近一半.
针对多个 SMA锁紧机构的同步性问题,通过在解锁和锁紧驱动单元选用不同丝径的 SMA丝来解决.解锁驱动单元选用了电阻较大、加热效率较高的小丝径 SMA丝,从而保证了较短的作动时间,提高了锁紧同步性.
从上面 SMA机构的工作原理和关键的结构设计方案可以看出,SMA丝和弹簧(驱动单元)的设计将直接关系到机构锁紧和解锁功能的实现,更重要的是驱动单元的输出位移、输出负载直接影响了 SMA锁紧机构的锁紧性能,因此驱动单元的性能直接关系到锁紧机构的功能,其设计非常重要.
2 驱动单元设计
2.1 设计原理与方法
图2中,机构解锁单元由 SMA和弹簧组成,楔块的运动主要取决于 SMA与弹簧之间的力关系:低温下弹簧力大于 SMA丝的低温屈服力,将SMA拉伸,楔块右移;当温度上升时,SMA丝收缩,丝的回复力大于弹簧力,楔块左移.若温度下降,工作块再次右移,恢复到初始状态,从而实现“SMA-弹簧”驱动单元的双程作动,其模型可简化如图 5所示.驱动单元在作动过程中,弹簧的安装载荷由 SMA丝低温屈服力决定,而弹簧的工作载荷由 SMA丝的高温回复力决定,但 SMA丝的高温回复力与弹簧刚度有关,也就与弹簧的安装载荷和工作载荷之差有关,因此整个设计过程应该是一个 SMA丝回复力和弹簧输出力相互匹配的过程.本文在 Liang本构模型[7]和压缩弹簧设计原理的基础上[8],发展了一种 SMA-弹簧驱动元件的设计方法和流程,该方法可以根据已知的作动距离、负载、SMA丝的力学参数,在要求的几何空间内设计出满足要求的压缩弹簧和与之相配的SMA丝径和丝长,方法的流程如图 6所示.

图5 驱动器简化模型
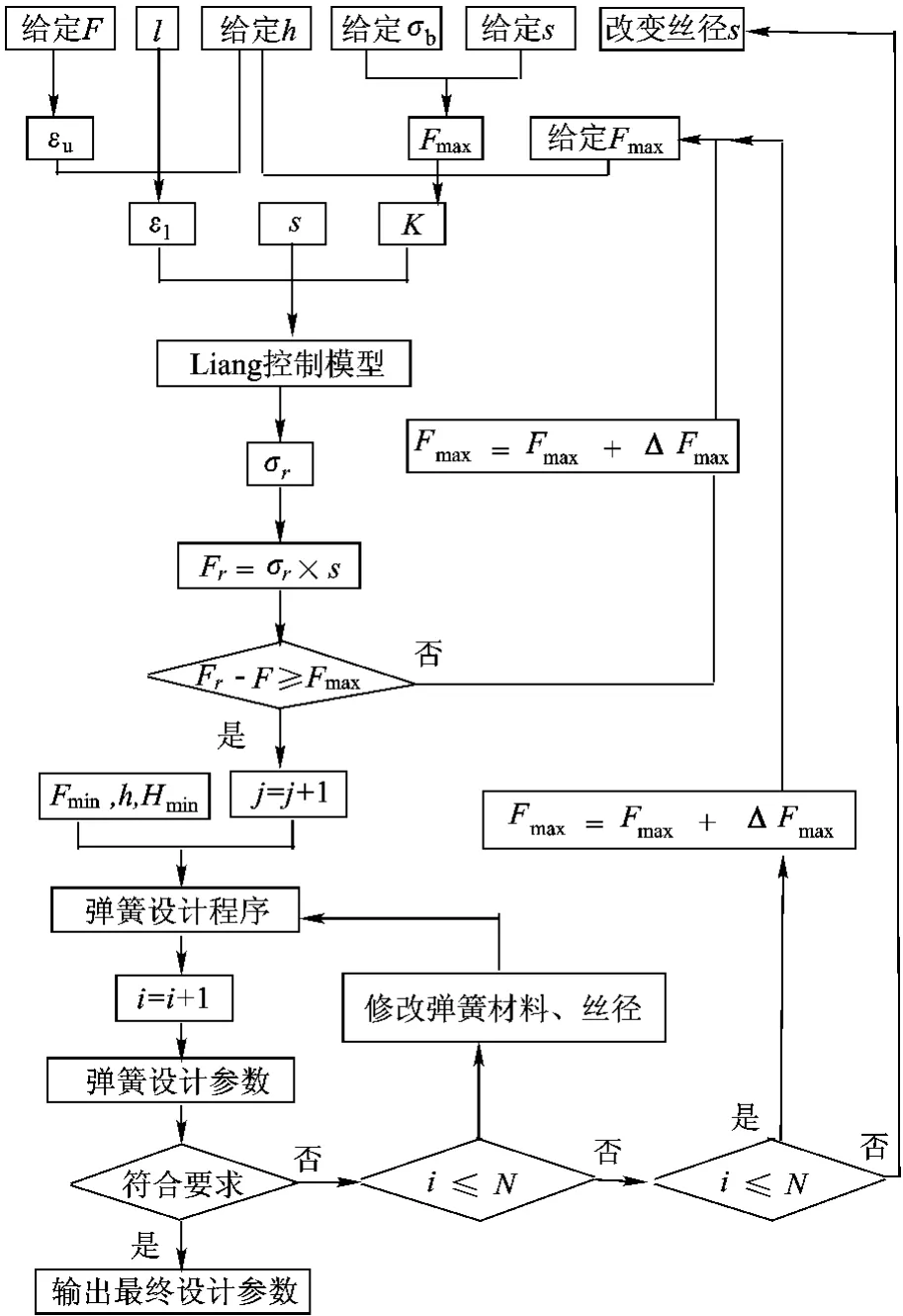
图6 设计方法流程图
2.2 Liang本构关系
驱动单元设计过程中,需要用到本构模型对SMA丝的回复应力进行预测,从而完成 SMA丝回复力和弹簧输出力的相互匹配.由于 Liang本构模型简单明了且计算结果相对较准确,本文选用 Liang本构模型对 SMA丝回复应力进行预测.图 5所示边界条件下的 Liang本构模型通常叫做控制回复模型,如式(1)所示.

式中,σ为应力;σ0为初始应力值;T为温度;T0为初始温度;ξ为马氏体含量;ξ0为初始马氏体含量;Θ为热弹性系数;Ω为相变系数;k为弹簧刚度;s为 SMA丝横截面积;l为 SMA丝原始长度.由式(2)可以看出,SMA丝的高温回复应力与弹簧刚度 k有关,进一步验证了 2.1中提出的设计方法.
SMA在升温过程中应力与温度关系表示为

式中,TM为升温初始温度;σ0为相应的初始应力;为应力作用下奥氏体相变开始与结束温度 ;σAs,σAf为相应应力 .
2.3 驱动器设计及性能分析
根据 2.1中提出的 SMA丝-驱动单元设计方法分别对解锁单元和锁紧单元进行设计,得出弹簧参数表如表 1所示.

表 1 驱动单元弹簧设计参数表
根据表 1中的设计参数,用 Liang模型对解锁单元驱动性能进行分析.选用对 SMA丝通电加热及热辐射方式传导,通电电压为 7.0V,得到设计参数下的“作动距离-时间”关系曲线,如图 7所示.由图可知,驱动单元最大作动距离为 5.6mm对应时间为 4.5s,可知解锁驱动单元能在 5.0s内完成解锁(只要作动位移大于 5.5mm即可完成解锁),而且作动位移略大于设计行程 5.5mm,使得驱动单元在作动位移上有一定的裕度.

图7 解锁单元作动距离-时间仿真实验对比图
3 试验分析
在上述设计工作基础上,完成了 SMA锁紧机构的的零件加工与装配.为了验证 SMA锁紧机构能否满足作动距离、锁紧时间、锁紧同步性、振动和高温环境的技术要求,本文对 SMA锁紧机构分别进行了性能测试、振动试验和高温环境试验.
性能测试表明:单个 SMA锁紧机构平均解锁时间为 5.6 s,锁紧时间为 0.9s,多个 SMA锁紧机构锁紧同步性小于 0.5 s,解锁同步性小于 1.0s.从图 7可知,解锁单元作动距离实验值和仿真结果吻合得很好.
用 4个 SMA锁紧机构共同锁紧一个飞轮,飞轮重 7.5kg,并将飞轮安装到振动试验台进行试验,在振动前后磁悬浮飞轮的固有频率基本没有发生变化,说明在振动试验过程中,SMA锁紧机构没有发生松动.高温环境试验显示 SMA锁紧机构在温度低于 90℃内锁紧不失效.
4 结 论
本文实现了利用 SMA丝驱动的空间磁悬浮飞轮锁紧机构的研制,在机构设计中采用了多处新颖结构设计,并发展了 SMA丝-弹簧驱动单元设计方法,对解锁和锁紧单元进行了设计,最终研制出了 SMA驱动的小型空间磁悬浮飞轮锁紧机构,并完成了相关的地面性能测试、振动试验和高温环境试验.研究结果表明:此次发展的 SMA锁紧机构安装体积小,在星载28V电压下能在6.0s内完全锁紧,在 1.0 s内完全解锁,并能够完全通过振动和环境实验.SMA驱动的磁悬浮飞轮锁紧机构具有锁紧力大、同步性好、可重复使用、低冲击、无污染等优势,有很大的工程应用潜力.
References)
[1]吴刚,刘昆,张育林.磁悬浮飞轮技术及其应用研究[J].宇航学报,2005,26(3):385-390 Wu Gang,Liu Kun,Zhang Yulin.Application and study ofmagnetic bearing flywheel technology[J].Journal of Astronautics,2005,26(3):385-390(in Chinese)
[2]周洁.用于卫星飞轮的磁悬浮驱动技术研究与展望[J].微电机,2003,36(2):43-46 Zhou Jie.Survey on the research and development of bearing less driver used as flywheel in satellite system[J].Micro Mortor,2003,36(2):43-46(in Chinese)
[3]Privat M,Costa AD.Pneumatic locking device for magnetic bearing reaction wheel[C]//Harris R A.Proceedings of the 10th European Space Mechanisms and Tribology Symposium.San Sebastián,Spain:ESA Publications Division,2003:121-128
[4]刘晓东,余立辉.磁悬浮飞轮自动锁紧系统的研制[J].机械与电子,2007,1(3):33-36 Liu Xiaodong,Yu Lihui.Development of automatic locking system for magnetic bearing flywheel[J].Machinery and Electronics,2007,1(3):33-36(in Chinese)
[5]Razov A,Cherniavsky A.Application of SMAs in modern spacecraft and devices[J].EDP Sciences,2003,112:1173-1176
[6]杜彦良.自动探测裂纹和主动控制裂纹扩展的智能材料结构研究[D].北京:北京航空航天大学能源与动力工程学院,1993 Du Yanliang.AResearch on intelligent material structures for active detecting and control the growth of cracks[D].Beijing:School of Jet Propulsion,Beijing University of Aeronautics and Astronautics,1993(in Chinese)
[7]Liang C,Roger C A.A one-dimensional thermo mechanical constitutive relation of shapememory materials[J].Journal of Intelligent Material Systems and Structures,1990,1(2):207-234
[8]成大先.机械设计手册[M].北京:化学工业出版社,2004:325-350 ChengDaxian.Mechanical design manual[M].Beijing:Chemistry Industry Press,2004:325-350(in Chinese)
(编 辑 :张 嵘)
Prototype SMA actuated locking device for small space magnetic bearing flywheels
Yan Xiaojun Zhang Xiaoyong Nie Jingxu
(School of Jet Propulsion,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Zhang Shaowei
(Beijing Institute of Control Engineering,Beijing 100190,China)
Based on magnetic levitation principle,the magnetic bearing flywheel is a new type of inertial actuator used in satellite attitude control.A locking device was used to eliminate thegap between the rotor and stator of magnetic bearing flywheel so as to protect it from shock and vibration damage during launch phase.The present pyrotechnical or motor actuated locking devices have the disadvantages of high shock,large size and un-resetable.A prototype shapememory alloys(SMA)actuated locking device for small space magnetic bearing flywheel was developed in this investigation.A method and procedures to design the actuator element based on Liang's constitutive model was presented.Then the SMA locking device was as sembled and the function,environment and vibration tests were carried out.Test results show that the device can complete lock function within 6s and release function within 1s under satellite powersupply of28V.Itcan also undergo the environment and vibration tests which simulate the launch phase.It is concluded that the new SMA locking device owning advantages of great locking force,small size,low shock and easy to reset has a potential use in space engineering.
shapememory alloy;magnetic bearing flywheel;space locking device;constitutivemodel;design method
V 47
A
1001-5965(2011)02-0127-05
2009-12-17
全国优秀博士学位论文作者专项资助项目(200351);新世纪优秀人才支持计划(NCET-06-0178)
闫晓军(1973-),男,教授,yanxiaojun@buaa.edu.cn.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
一重技术(2021年5期)2022-01-18
有色金属加工(2021年5期)2021-10-20
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
小学科学(学生版)(2021年4期)2021-07-23
会计论坛(2020年2期)2020-08-14
导弹与航天运载技术(2020年1期)2020-03-27
无损检测(2019年10期)2019-10-31
中国临床医学影像杂志(2019年1期)2019-04-25
浙江临床医学(2018年7期)2018-09-20
