
参数自整定模糊PID控制器的设计与仿真
2011-03-02 07:37段五星张新政
五邑大学学报(自然科学版) 2011年3期
段五星 ,张新政,2
(1.广东工业大学 自动化学院,广东 广州 510006 2.广州科技贸易职业学院,广东 广州 511442)
参数自整定模糊PID控制器的设计与仿真
段五星1,张新政1,2
(1.广东工业大学 自动化学院,广东 广州 510006 2.广州科技贸易职业学院,广东 广州 511442)
为保证大时滞复杂系统的稳定性和抗干扰性,结合模糊控制和常规PID控制的优点,设计了一种参数自整定模糊PID控制器,根据其输出形式的不同,采用了位置式和增量式2种方法对时滞系统进行了有效控制,利用Matlab软件的Simulink和Fuzzy工具箱进行了仿真.结果表明:增量式输出方法时控制效果更好,并具有零超调、无静差、过渡时间短、稳定性好等特点.根据实验结果,总结出了调整模糊PID控制器各参数的一般规律和设计方法.
参数自整定;模糊PID控制器;位置式;增量式
PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器.传统PID控制器具有控制原理简单、使用方便、工作可靠等特点,但对现代工业工程控制中具有大时滞、非线性、时变、强耦合等特性的被控对象,其应用受到了限制[1-2].单纯的模糊控制具有简化算法、解决非线性问题方面的优势,但在控制系统精度、静差和稳定性方面效果不是很理想[3],模糊PID控制结合了传统PID控制和模糊控制的优点,控制时按照人的思维方式、根据系统输出在线实时调整PID的3个参数,不但加强了系统的适应性和稳定性,而且提高了系统的控制精度,改善了系统的动态特性和静态性能.[3-4]但与传统PID技术的成熟相比,模糊PID控制技术目前仍缺乏成熟完善的理论,而且一般研究都只针对特定对象进行单一分析,或者只把传统PID和模糊PID进行比较[5],缺乏针对模糊PID控制的系统性研究.基于此,本文主要根据模糊PID控制器输出形式的不同,采用位置式和增量式2种方法进行对比研究,并根据实验总结出模糊PID控制器设计和参数整定的一般规律.
1 模糊PID控制的基本原理
模糊PID控制[6]即利用模糊逻辑算法并根据一定的模糊规则对PID控制的比例(p)、积分(i)、微分(d)系数进行调整,以达到较为理想的控制效果.模糊PID控制在控制系统中的实现有多种结构形式,本文采用经典的参数自整定模糊PID控制形式,其结构框图如图1所示.模糊PID控制器共包括参数模糊化、模糊规则推理、参数解模糊、PID控制器等几个重要组成部分.其中模糊推理机根据系统的输入和反馈信号,计算实际值和理论值的偏差e( k)以及当前的偏差变化ec( k),然后根据模糊规则进行模糊推理,再对模糊参数进行解模糊,输出PID调节器的比例、积分、微分系数,最后通过传统PID控制器控制被控对象由此可见,整个模糊PID控制系统的关键就是设计合适的模糊控制器.
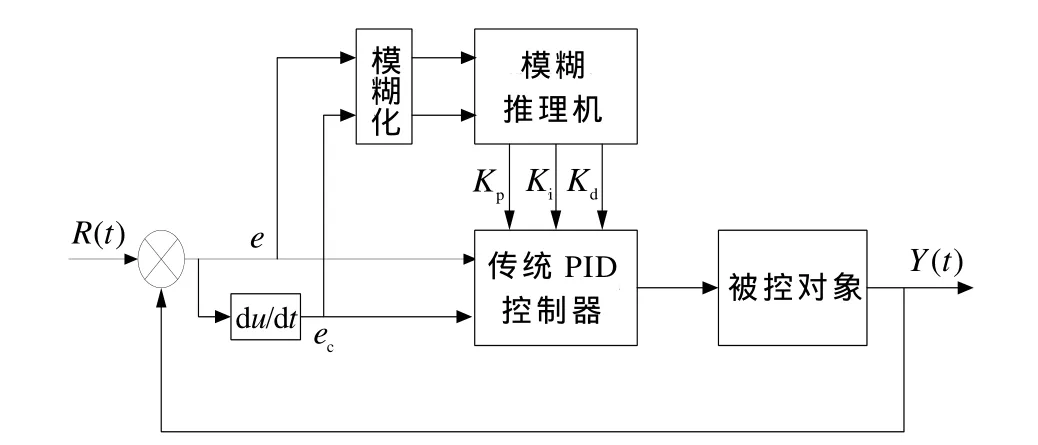
图1 模糊PID控制系统结构框图
2 模糊PID控制器的设计
2.1 模糊控制器的设计步骤
步骤1 设计模糊语言变量,其中包括:
1)确定输入、输出量的模糊语言变量名称.选定实际值和理论值的偏差e( k)以及当前的偏差变化ec( k)为输入量,传统PID调节器的3个参数Kp、Ki和Kd或其增量ΔKp、ΔKi和ΔKd为输出量.本文根据这2种参数形式,设计了2种不同的控制器进行对比分析.
2)根据实际要求确定模糊语言变量的模糊论域与基本论域,将模糊论域离散化,并且确定其量化等级、量化因子及比例因子.由于选用单位阶跃为系统的输入信号,根据一般控制系统无静差的要求,设模糊语言变量的基本论域为[-1,1],其模糊论域为[-6,6].误差变化率的实际论域很难确定,可以根据系统响应速度的要求以及系统的稳定性情况具体调试,此处暂选取[-1,1],也将其模糊论域定为[-6,6].初步选定模糊控制器的3个输出量为Kp、Ki和Kd或ΔKp、ΔKi和ΔKd的基本论域都为[-0 .6,0.6],模糊论域都为[-6,6].由公式:可得对应的量化因子由于模糊控制器的精度限制和系统的非线性性质,在仿真和具体实现时需要进行调试.

综合考虑系统精度和算法快速性,用7模糊子集覆盖以上每个模糊论域.模糊子集分别为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大).
步骤2 确定模糊控制规则
总结工程设计人员的技术知识和实际操作经验,并综合考虑在不同时刻3个参数的作用及相互之间的互联关系,得到模糊控制规则,如表1所示.

表1 ΔKp、ΔKi、ΔKd模糊控制规则表
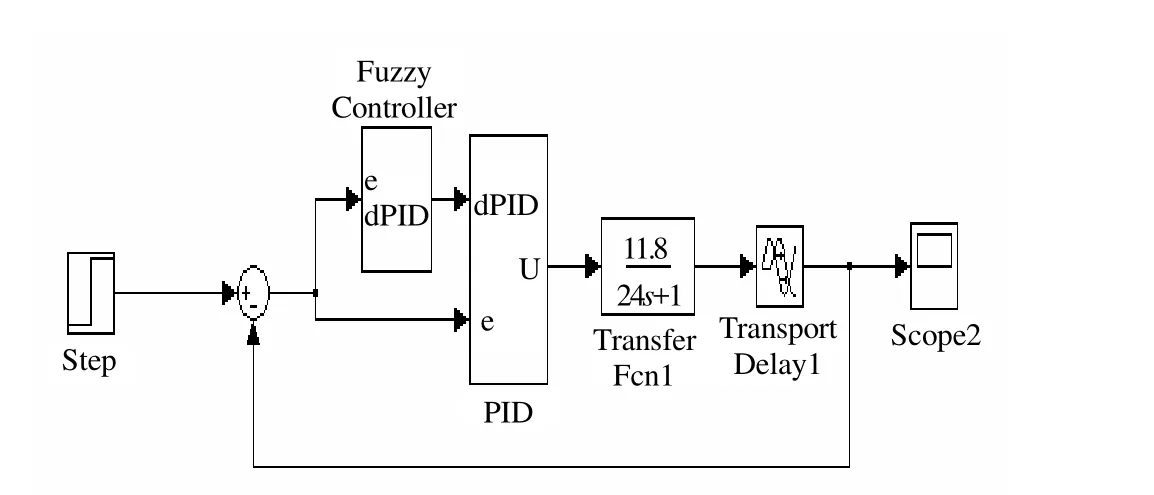
图2 参数自整定模糊PID控制系统
2.2 参数自整定模糊PID控制系统的搭建
在Matlab的Simulink工具箱中设计参数自整定模糊PID控制系统如图2所示,其中包括模糊控制器子系统和PID控制子系统,根据模糊控制子系统输出量的不同形式,得出不同的PID控制子系统.
2.3 模糊PID控制器的设计方法
根据模糊控制器输出量形式的不同,可以设计不同的算法.本文主要设计位置式和增量式2种方法进行对比.
2.3.1 位置式PID控制器

图3 位置式PID控制子系统
2.3.2 增量式PID控制器
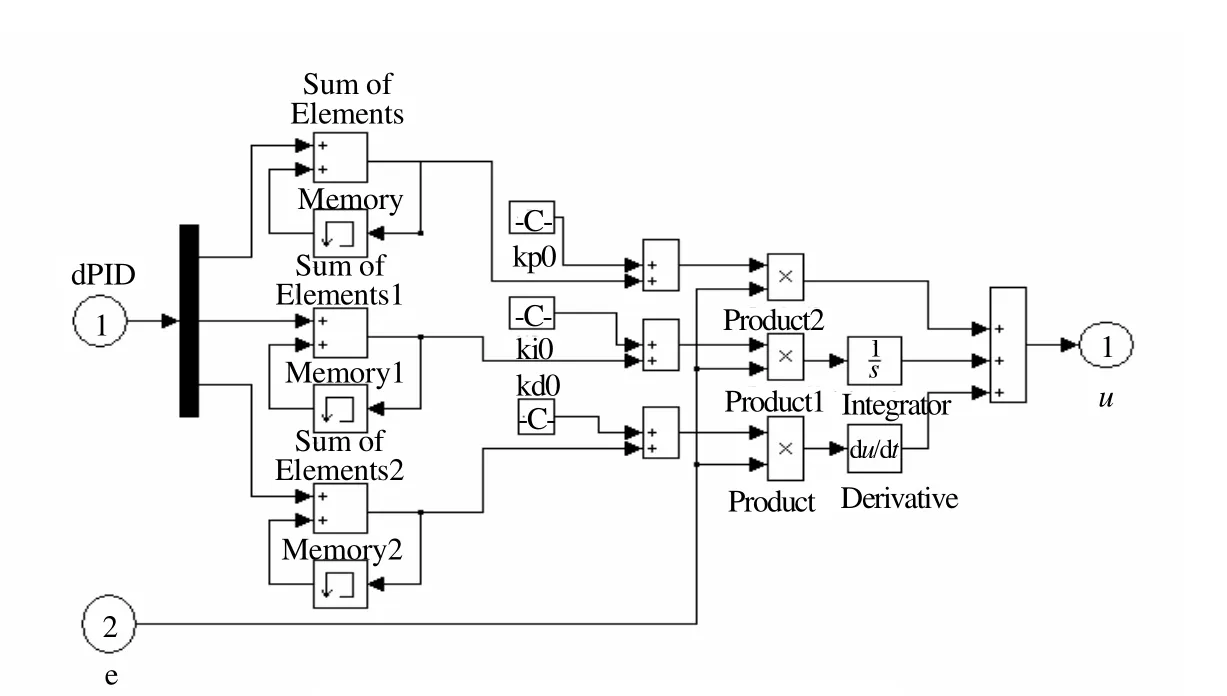
图4 增量式PID控制子系统
3 系统仿真及分析
3.1 仿真调试
实验表明,系统的量化因子、比例修正系数和参数的初值对模糊PID控制系统的性能影响较大.同时,由于控制系统模型的近似性和模糊控制器的非线性,目前没有完全成熟的理论来确定这些参数值,但通过实验和经验,总结出调整各个系数的规律如下.
1)增大误差e的量化因子,相当于不改变误差e大小的基础上增大了误差e模糊论域的对应数值,从而能加快系统的上升速率、增大超调量.当其过分大时,可能导致系统发散或震荡;但太小时,会增加系统的调节时间、降低系统的稳态精度.
2)增大误差的变化ec的量化因子,能提高系统对应状态变化的能力;但过分小时,会加快系统的上升速率、影响系统的稳定性.
3)比例修正系数和初值主要影响3个参数Kp、Ki和Kd的大小,确定其大小时主要根据3个参数间的相互作用和它们对PID控制器的影响来进行修正.增大Kp可以加快系统的响应速度、降低系统的稳态误差,但是过大则导致系统震荡或发散;Ki主要影响系统的稳态误差,增大Ki可以减小系统的调节时间,而过大则可能导致系统不稳定,反之亦然;Kd主要影响系统的动态性能,增大Kd可以抑制偏差的变化,但是过大则会延长调节时间、降低系统的抗干扰能力.
具体进行调试时,根据输出的变化情况,并结合如上的控制规律对参数进行调整.
3.2 仿真结果

图5 扰动作用下模糊PID控制系统的输出
运用M语言在Matlab下编程[7],计算2种方法下系统的性能指标,如表2所示.由表2的结果可知,位置式和增量式模糊PID控制器都能实现零超调、无误差,但是增量式模糊PID控制系统的上升时间和调节时间短、响应快,同时表现出更好的抗干扰能力.由此可以得出结论:和位置式控制相比,增量式控制方法细化了参数变化的范围,提高了系统的控制精度,通过调节PID调节器的3个参数增量的细微变化,在保持零超调和无静差的前提下,可以进一步提高系统的响应速度.同时,控制器中具有记忆功能的存储装置也提高了系统的安全性和鲁棒性.
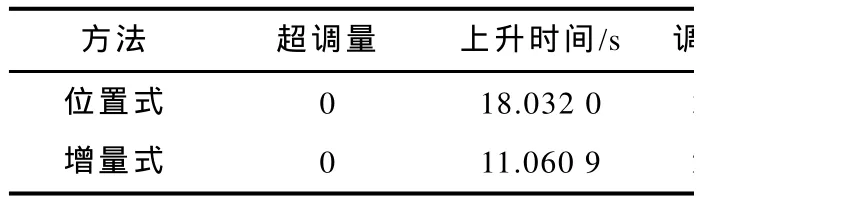
表2 位置式和增量式模糊PID控制系统性能指标
4 结束语
在实际工程应用中,很多被控对象的结构复杂、模型不确定,传统的PID控制技术在控制大时滞复杂系统时效果不佳.本文结合智能控制中先进的模糊控制技术,设计了参数自整定模糊PID控制器,一方面,通过对位置式和增量式2种方法的对比研究,运用由易到难的思路,由浅入深地分析了控制器的设计和优化过程,使控制器得到了更好的控制效果,提供了一种有效地分析问题的方法,也较好地实现了传统控制技术和先进智能控制技术的有效结合;另一方面,以大时滞系统为例进行仿真实验,也体现了参数自整定模糊PID控制器广阔的应用前景.
[1]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[2]DESHPANDEP B.Improve quality control on-line with PID controllers[J].Chemical Engineering Progress,1991, 88(5):71-76.
[3]席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[4]BLANCO J S.Hybrid self-learning fuzzy PD+I control of unknown linear and nonlinear systems[C]//Computer Science and Proceedings of the Fifth Mexican International Conference.[S.l.]:[s.n.],2004:233-240.
[5]张泾周,杨伟静.模糊自适应PID在高空模拟舱中压力控制的应用研究[J].工业仪表与自动化装置,2010, 25(1):21-24.
[6]韩启勇,王蕊.模糊PID控制器MATLAB仿真探讨[J].中国仪器仪表,2009(增刊):78-81.
[7]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
Design and Simulation of the Parameter Self-tuning Fuzzy PID Controller
DUAN Wu-xing1,ZHANG Xin-zheng1,2
(1.Automation Institute,Guangdong University of Technology,Guangzhou 510006,China; 2.Guangzhou Vocational College of Technology&Business,Guangzhou 511442,China)
A parameter self-tuning fuzzy PID controller combined with fuzzy control with conventional PID control is designed to guarantee the interference suppression and stability of the Complex Large Scale Time Delay System.And according to its different output form,two methods,the position type and incremental type,are developed to control a time lag system effectively.Then the Simulink and Fuzzy tool boxes of Matlab are used to conduct computer simulation.The results show that the incremental type is better with zero overshoot,no static error,shorter transient time and superior stability.Finally the general rules for adjusting the parameters and the main methods of designing the fuzzy PID controller are obtained.
parameter self-tuning;fuzzy PID controller;position type;incremental type
?
TP273
A
1006-7302(2011)03-0051-05
2011-03-28
广东省产学研项目(2010B090301042)
段五星(1988—),男,湖南邵阳人,硕士研究生,研究方向为大系统的优化、控制及管理;张新政,教授,博士生导师,通信作者,研究方向为复杂大系统的建模与控制、变结构控制.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
煤气与热力(2021年12期)2022-01-19
中学生数理化·中考版(2019年9期)2019-11-25
西南交通大学学报(2016年3期)2016-06-15
电信科学(2016年9期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
筑路机械与施工机械化(2014年4期)2014-03-01
