
计算机控制汽车电池实验系统
2011-02-28 05:10张蕴绮
网络安全与数据管理 2011年11期
张蕴绮
(常州工程技术学院,江苏 常州 213164)
HEV动力蓄电池的管理一直是混合动力电动汽车HEV发展过程中的一个非常关键的问题[1]。有效的电池管理系统在提高蓄电池寿命的同时,可以及时准确地估计蓄电池的剩余容量,当电池出现不一致性时对电池进行均衡控制,保护蓄电池。现有电池均衡控制方案大多以电压均衡作为标准,低电压电池的充电电流变大些,高电压电池的充电电流变小些。以电压的差异来衡量电池容量进行均衡控制,在一定范围内能起到均衡的效果,但实际情况中,由于单个电池内部结构的差异,在放电过程中,各单个电池表现出的电压方差值可能不同,方差大的电池电压可能小,但剩余容量却大,以电压一致为均衡目标的系统不但没起到均衡作用,还造成不一致性现象加重。因此本论文提出基于电功率K值作为衡量电池差异的方法。
1 基于电功率的电池组均衡充放电控制策略
电池组充放点均衡控制原理示意图如图1所示。电池组由E1,E2……En串联而成,电池组通过逆变器对电动机供电,发电机G电压通过AC/DC转换后,可向电池组充电,Kc为控制充电开关,DC/DC模块由电池组或者发电机提供能量,其输出电压为单体电池电压,对均衡器进行供电,均衡器由电池管理模块控制,能控制对单体电池均衡的能量值。
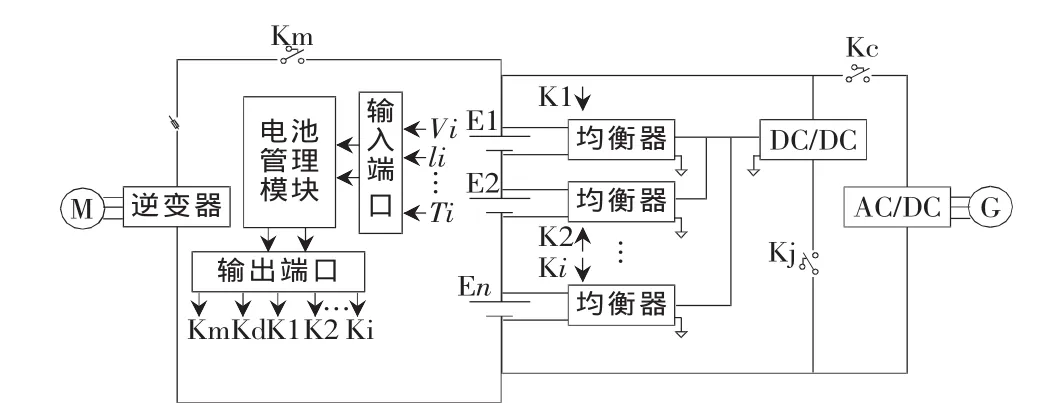
图1 电池组充放点均衡控制原理示意图
电池管理模块采集单体电池电压,电池组电流,温度值,计算出单体电池的电功率K值,并计算不均衡度,当检查到有某个电池Ei容量较低后,电池管理模块计算出相应的均衡力度,通过控制输出开关量Ki的占空比,调节均衡器对电池的均衡力度。
2 电池均衡控制实验系统
基于功能和成本考虑,电池单元模块采用AT89S51系列单片机,电池组管理系统采用AT89S8053系列单片机。AT89S51具有如下特点:40个引脚,4 KB Flash片内程序存储器,128 B的随机存取数据存储器(RAM),32个外部双向输入/输出 (I/O)口,5个中断优先级2层中断嵌套中断,2个16位可编程定时计数器,2个全双工串行通信口,看门狗(WDT)[2]电路,片内时钟振荡器。
通过寄存器WMCON可以方便设置看门狗时钟周期(16~2 048 ms),以及对 EEPROM进行读写操作。
2.1 时钟电路及复位电路
电池管理单元的时钟频率采用11.059 MHz晶振,AT89S51的时钟周期为90 ns。复位方式为上电复位和开关复位。电路图如图2所示。

图2 时钟电路、复位电路原理图
2.2 A/D转换电路设计
对电池管理系统来说,电压的精确采集直接影响多电池组均衡控制的效果,因为电池端电压下降值在几伏左右,而且基于电功率的均衡控制策略,需要考虑电池间微小电压的影响,因此对A/D转换器[3]的精度要求较高。本系统采用8位的ADC0809作为A/D转换器
A/D转换电路如图3所示。其中74LS74对来自51 ALE引脚的时钟脉冲进行2分频后,作为ADC0809的时钟信号。
采集第i路信号时,地址为iD,本系统采用查询法对A/D转换器的转换信号进行读取。
2.3 I/O电路设计
电池管理系统通过开关量输出,控制均衡器的工作状态,当输出1时,均衡器的功率MOSFET接通,均衡电路工作,当输出0时,均衡器停止工作。
均衡器工作电流较大,因此需要增加光电隔离电路,以免对单片机系统产生干扰。
I/O输出电路如图4所示,系统选用8位同相芯片74LS374作为驱动芯片,采用TP521作为光耦隔离电路,通过对74LS374不同位写1或者0,可以控制8位12V电压开关量的输出。

图3 A/D电路原理图

图4 I/O电路原理图
2.4 CAN通信电路设计
本系统采用CAN总线系统[4]智能节点方式,CAN通信控制器采用SJA1000,CAN总线驱动器采用82C250,光耦隔离电路采用高速光电耦合器6N137。以80C51单片机作为CAN总线网路通信的节点的微处理器,采用SJA1000作为CAN控制器,PCA82C250作为CAN收发器和物理总线的接口,通过6N137高速光耦实现总线上各CAN节点间的电气隔离。另外在两根CAN总线输入端和地之间分别接了一个防雷击管,防止在两输入端与地之间出现瞬变干扰时,放电起到一定的保护作用。82C250的Rs脚上接有一个斜率电阻,电阻的大小可以根据总线通信速度适当调整,一般在16~140 kΩ之间。系统选用47 kΩ斜率电阻,如图5所示。
2.5 RS232串口通信电路设计
工业设备通信通常希望执行简单的串行命令,并希望这些命令同个人计算机或者附加的串行端口板上的标准串行端口兼容。RS-232是目前PC机与通信工业中应用最广泛的一种串行接口。电路图如图6所示。

图5 CAN通信电路原理图

图6 串口通信电路原理图
2.6 电压信号调理电路设计
输入通道的结构框图如图7。

图7 采集通道原理框图
对于电池单元模块,需要采集6个电池的电压信号,因为电池电压值大于10伏,而ADC0809的输入电压范围为0到5伏,因此需要对输入电压进行变换,本系统采用差动输入的方式,选用的运放为LM324。如图8所示。
3 电池管理系统软件设计
设计基于51单片机汇编语言的控制算法程序。程序利用Keil uvision2平台进行调试。
电池管理系统的整体流程如图9所示。在上电后,首先进行看门狗时钟设置,这样能大大提高整个单片机系统的抗干扰能力。
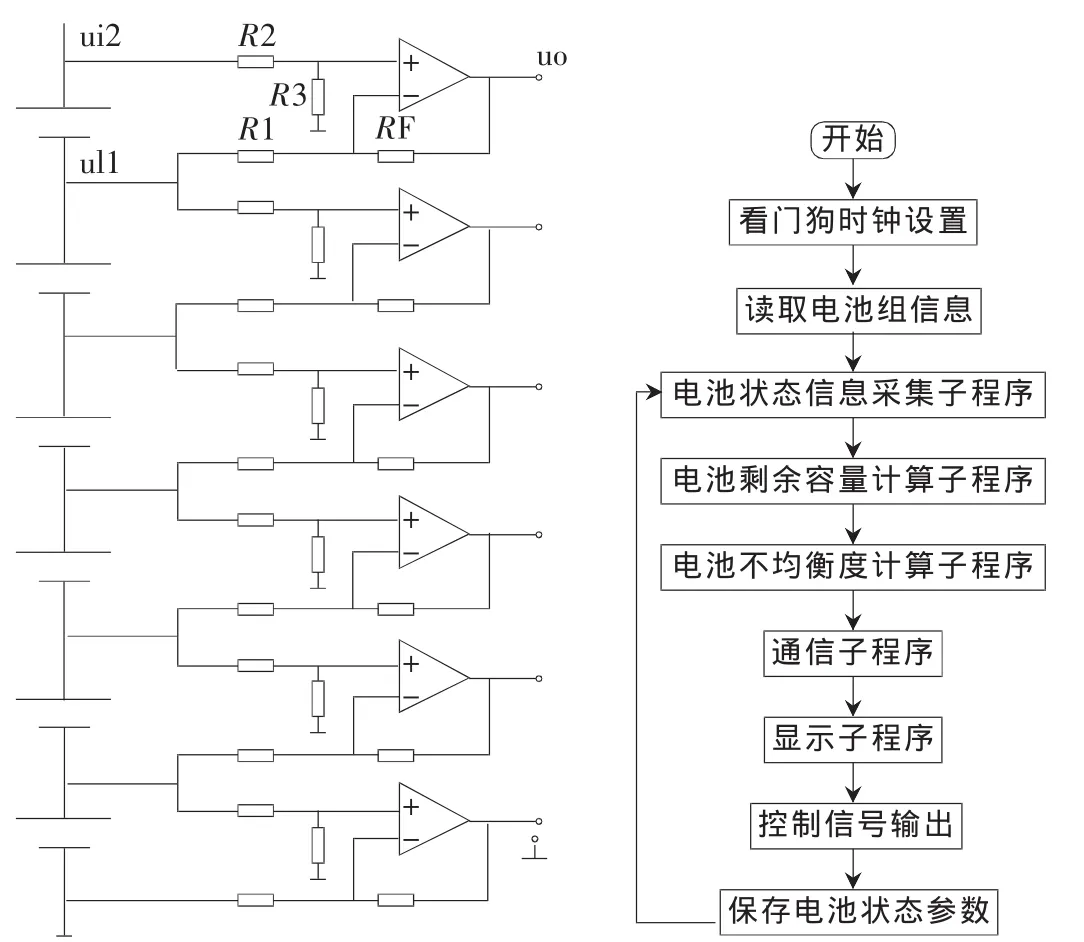
图8 电压采集信号调理电路图 图9 控制算法程序结构图
在系统初始化后,读取存放在数据存储器中电池组信息。该段信息包括上一次断电后电池组剩余容量状态,电池组不均衡信息等,通过8253的非易失性EEPROM保存。
电池管理系统的主程序包括5个子程序:
(1)电池状态采集子程序
负责对电池组中单个电池的电压,电流温度等状态量进行采集,并进行中值滤波,剔除采集通道受干扰得到的奇异值。
(2)电池剩余容量计算子程序
电池剩余容量计算子程序负责计算每个电池的剩余容量,并且为均衡控制策略进行数据预处理。
(3)电池不均衡度计算子程序
通过判断电池组中各电池输出的电功率,判断电池组的不均衡性,如果电池组出现预定的不均衡状态,程序返回不均衡电池的标号值,不均衡度值,由之后的控制输出程序控制均衡器工作。
(4)通信子程序
包括CAN总线收发和RS232通信两部分。CAN总线收发程序负责电池管理系统与多能源控制器间的信息交换,RS232负责电池管理系统与PC机的信息交换。
(5)显示子程序
通过数码管显示电池剩余容量和均衡控制器工作状态。
论文设计了基于电功率的均衡充放电控制模块,确定了单片机算法的实现方法;研制了有一定的准确性和可靠性又比较简单的动力电池均衡控制实验系统。对动力电池管理系统电池剩余容量判断模型的理论研究具有重要的现实意义。
[1]陈清泉,孙立清.电动汽车的现状和发展趋势[J].科技导报,2005(4).
[2]彭芬.单片机应用系统设计中的看门狗技术探究[J].武汉职业技术学院学报(综合版),2006(5).
[3]房慧龙.A/D转换技术及其发展[J].中国西部科技,2007(7).
[4]韩晓东,车京春,吴波,等.基于 32位单片机电池管理系统的 CAN通信设计[J].电气应用,2006(9).
猜你喜欢
电子与信息学报(2022年6期)2022-06-25
电光与控制(2022年4期)2022-04-07
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
数学大王·中高年级(2017年2期)2017-02-08
电子与信息学报(2016年9期)2016-10-13
学苑创造·A版(2016年4期)2016-04-16
电源技术(2016年9期)2016-02-27
