
少自由度并联机构探析
2011-02-19 07:50于振文张亚杰
制造业自动化 2011年3期
于振文,张亚杰
YU Zhen-wen,ZHANG Ya-jie
(吉林农业科技学院,吉林 132101)
0 引言
机器人是一种具有人体上肢的部分功能,工作程序固定的自动化装置。基于并联机器人的多坐标数控机床研究已成为机器人研究领域以及机床制造领域的研究热点。目前,国内外所推出的各种并联机床大多数都是单纯利用并联机构原理来构造机床。
1 并联机构的特点和应用
并联机构,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式联系在一起来驱动的一种闭环机构。1962年,罗马尼亚人Gough[1]采用并联机构设计了一种六自由度的汽车轮胎测试机。1965年,德国Stewart[2]发明了六自由度并联机构,并作为飞行模拟器用于对飞行员的模拟训练。澳大利亚著名机构学教授Hunt[3]在1978年提出将六自由度的Stewart平台机构作为机器人机构(如图1所示)。从此推动了并联机器人发展的步伐,从此并联机器人机构被广为关注,20世纪90年代后期成为机器人方面新的研究热点。虽然并联机构组成的形式各不相同,但它们却具有相同的特点。
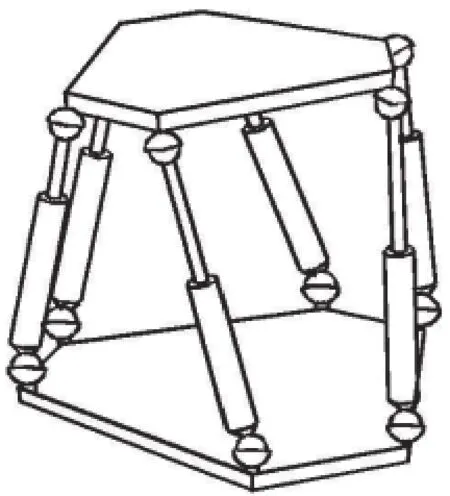
图1 Stewart并联机器人机构
相对于串联机构,并联机构特点如下:
1)并联机构具有桁架结构形式,每根杆件所受工作载荷时变形小,结构紧凑,机构整体刚度大;
2)并联机器人不需要中间传动系统,因此作为操作终端的动平台质量小,运动起来自然灵活,且运动速度快;
3)不论杆件尺寸大小,均具有较好的动态性能;
4)并联机构运动学正解复杂,反解却很容易;而串联机构运动学正解容易,反解复杂;
5)并联机器人的各个分支机构采用直接驱动,无中间环节的误差累积与及其放大,因而动平台的定位精度高。
目前,并联机构被广泛应用于航空工程、机械制造、医疗器械、食品包装、电子等多个领域,典型的应用实例是飞行模拟器和并联结构数控机床。例如:军事领域中的潜艇、坦克驾驶运动模拟器,新一代战斗机的矢量喷管、潜艇以及空间飞行器的对接装置、姿态控制器等;生物医学工程中的细胞操作机器人、可实现细胞的注射和分割;微外科手术机器人;大型射电天文望远镜的姿态调整装置;混联装备等。
20世纪90年代以来,并联机构又用于转位装置,并开始用于数控机床,被认为是“彻底改变了100多年来机床的结构配置和运动学原理,并将成为21世纪新一代机床的范例”[4]。
2 并联机器人研究现状
1994年,Giddings &Lewis公司在美国芝加哥IMTS’94博览会上首次展出了Variax型并联机床,这是机床结构重大改革的里程碑,引起了世界各国机床研究单位和生产厂家的高度重视[5]。目前,国内、外有许多公司和研究单位在研究并联机构机床。如美国的Hexel公司研制的Tornado并联机床,Ingersoll公司研制的HOH-600型卧式布局的六杆并联机床。
我国的并联机床研究起步虽然较晚,但成效却很显著。关于并联机器人的研究开发和应用正日益广泛,其中燕山大学是国内最早研究并联机器人的单位之一,1991年,燕山大学黄真教授研制出我国第一台并联机构机器人样机,并在此基础上作了很多并联机器人的理论研究;1994年研制出柔性铰链并联式六自由度机器人误差补偿器。清华大学也是国内最早开始进行并联机床研究的单位之一,从1995年开始进行并联机构机器人的研究,并于1997年12月25日与天津大学合作,共同开发出我国第一台基于Stewart平台机构的大型镗铣类并联机床原型样机VAMT1Y,其中部分理论成果填补了我国这项领域的空白。中科院沈阳自动化研究所研制出的五坐标并联机床,该机床正在中科院沈阳自动化研究所进行切削实验以对其性能做进一步的评价[6]。东北大学研制的DSX5-70型三杆并联机床是由三自由度的并联机构和两自由度的串联机构混联组成的五自由度并联机床。
3 少自由度并联机器人
少自由度并联机构近年来成为国际机构学和机器人领域研究的热点。少自由度并联机器人是指自由度数为三,四和五的并联机器人,由于自由度较少,较六自由度并联机构结构简单,使用灵活、位置分析简单、控制算法简便,因此具有很好的应用前景。
少自由度并联机器人机型较少,目前已有的少自由度并联机构主要是三自由度机构,包括1988年clave[7]提出的Delta三自由度移动机构,Tsai[8]提出的几种三维移动机构,Huang[9]讨论的多种三自由度立方角台机构。并联机器人的研究历史已超过20年,但目前国际上已综合出的较好的少自由度并联机器人机构只有上述的Delta和Tsai等五、六种。
三自由度并联机器人机构是并联机器人机构中的一个重要分支,是并联机器人机构中很有实用价值的一个种类,也是随着并联机器人技术的发展而发展起来的。这类机构既不像简单的单自由度机构的运动性是确定的,也不像六自由度并联机构运动那样可以完全按照需要任意给定。
Tricept并联机构作为一种少自由度的并联机构,在许多领域得到了广泛的应用,特别是在并联机床上的应用已经取得了巨大的成功。就可重构和多功能而言,目前并联机器人家族中最为成功的范例当属Neumann博士在1988年发明的Tricept混联机械手模块,该模块原型(Tricept605)为一种带有从动支链的三自由度并联机构与安装在其动平台上的三自由度转头串接而成的六自由度混联机械手,具有工作空间范围大、刚度/重量比高、可重构能力强,且可实现末端位置全闭环反馈等优点。可重构并联装备是为了适应快速变化的市场需要而出现的现代制造装备。这类制造装备可以快速重构为不同的并联机器,以适应不同的工作需要和工作环境。
目前,波音、大众、通用、Ope1、Aicoa、英国航空航天公司以及美国别克汽车公司(中车)等国际著名飞机和汽车制造商均利用Tricept模块多功能和可重构性强的优点,构建出各种装备用于大型铝结构件和大型模具的高速加工、白车身激光焊接、发动机和汽车部件总成装配等(如图2所示)。
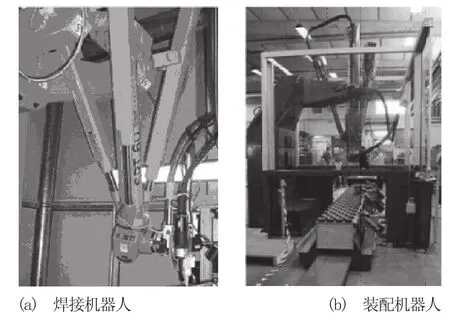
图2 Tricept机器人多种应用
4 并联机器人动力学研究
并联机器人的动力学研究包括机构的动力学模型的建立、机构受力分析、构件惯性力计算、动力平衡、动力响应等方面,他们在六自由度并联机器人的设计与控制中起到非常重要的作用,是确定并联机器人主要结构参数的基础。
并联机器人的动力学及动力学建模是并联机器人研究的一个重要分支,其中动力学是研究物体的运动和作用力之间的关系,动力学模型是并联机器人实现控制的基础,因而在研究中占有重要的地位。
并联机器人,特别是少自由度并联机器人的动力学研究开展得相对较少,但所使用的研究方法却比较多,几乎涉及所有力学方面的原理。目前常用的建模方法主要有牛顿-欧拉(Newton-Euler)法,拉格朗日(Lagrange)法,凯恩方程(Kane)法,虚功原理法,高斯原理(Gauss)法等。
Fichter在忽略腿部惯量影响的情况下建立了Stewart平台的动力学方程。Geng等对并联机器人的几何形状和惯性扰动作了简化假设,然后利用拉格朗日法建立了并联机器人的动力学方程,Ji考虑了腿部惯量对Stewart平台的影响,建立了Stewart平台的动力学方程。
[1]V.E.Gough,S.G.Whitehall.Universal Tyre Test Machine.FISITA Ninth International Technical Congress,1962:117-137.
[2]D.Stewart.A platform with six degrees of freedom[C].Proceedings of the Institution of Mechanical Engineering(Lond on),1965,180(15):371-386.
[3]K H Hunt.Kinematic Geometry of Mechanisms[M].Oxford:Oxford University Press,1978.
[4]张曙,Heisel U.并联运动机床.北京:机械工业出版社,2003.
[5]言川宣.机床结构的重大创新VARIAX机床问世[J].世界制造技术与装备市场,1995,1:16-17.
[6]王奇志,谭民,等.一类县有对称结构并联机器人的工作空间[J].机器人(ROBOT),2001(4):322-325.
[7]Clavel,R Delta.A fast robot with parallel geometry[C].//Proceedings of the International Symposium on Industrial Robots,1988:91-100.
[8]TsaLung W I.The enumeration of a class of three-dof parallel manipulators[J].Proc of 10th IFTOMM Conf,1999,3:1123-1126.
[9]Huang Z,Fang Y F.Kinematical characteristics analysis of 3-DOF in-parallel actuated pyramid mechanism[J].Mechanism and Machine Theory,1996,31(8):1009-1018.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
中国设备工程(2022年12期)2022-07-11
黑龙江大学自然科学学报(2022年1期)2022-03-29
中学生数理化·中考版(2021年10期)2021-11-22
制造技术与机床(2019年2期)2019-03-06
制造技术与机床(2017年11期)2017-12-18
制造技术与机床(2017年9期)2017-11-27
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
