
单片机应用系统研究——轮式移动机器人控制系统设计与研究
2011-02-19 07:50米秀杰
制造业自动化 2011年3期
米秀杰
MI Xiu-jie
(长春职业技术学院,长春 130033)
0 引言
机器人技术是一种面向未来的现代化技术,机器人技术与网络技术、基因技术、通信技术、计算机技术等一样,属于高新技术。机器人的定义是多种多样的,在英文中机器人名为Robot,在1920年捷克作家卡雷尔·卡佩克(Karel Capek)的剧本《Rossum's Universal Robots》中首次出现,剧本中文意思为“罗萨姆的万能机器人”。Robot为剧中的机器人,在捷克语中意为“苦力”,“奴隶”,英文的Robot 由此而来。1979年美国机器人协会将机器人定义为:“可重复编程的多功能操纵器,设计成通过不同的编程动作为执行多种任务移动原料、部件、工具或专门的设备。我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。
1 轮式移动机器人控制系统的设计与研究
轮式移动机器人(Wheeled Mobile Robot-WMR)系统主要包括:机械结构、直流伺服电机、电源、测速元件、CCD摄像头、微控制器、功率驱动模块等。
1.1 移动机器人的体系结构
1.1.1 机械结构
机器人的移动方式有很多种,但大致就分为两种:车轮式和足步式两种,车轮移动方式的大部分技术比较成熟,控制也比较容易,而足步行走方式控制要困难得多,但随着传感器技术与微控制器的发展,已经有了很大的进展。
本文所研究的WMR采用车轮式移动机构。它有三个车轮,其中前轮为从动轮,为万向自由轮,选用直径为100mm的万向夹板轮;后两轮为驱动轮,固定式不可转向,且相互独立,选用硬橡胶夹板轮,直径为200mm。两个后轮各由一个200mm长的轴和轴承座固定在底板上,每个轮子有独立的电气驱动模块和变速机构,变速机构采用链条传动装置。
机器人总体结构较为简单,外观上主体有圆形底座、长方形保护壳与摄像头等。底座选用8mm厚的铝板,能够承受系统所需要的重量和强度,轮子、电机及传动装置与码盘等都固定在其上。保护壳为3 mm厚的铝板,上面固定有铝型材支架,里面装有控制驱动电路板和供电电源模块。总体结构如图1所示。
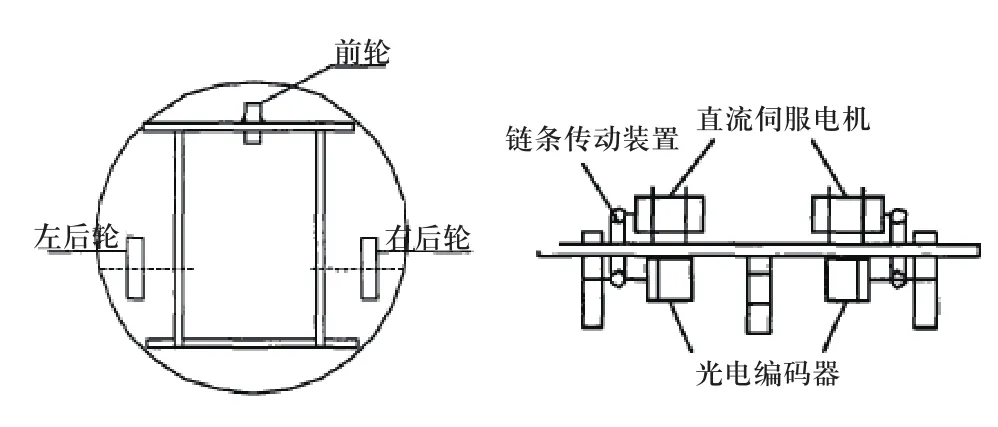
图1 WMR的总体结构
1.1.2 电气结构
轮式移动机器人的电气结构,包括电源模块、传感器及其接口、控制电路、CCD摄像头、直流伺服电机等。
1)电源
WMR是独立行走的系统,控制电路板和光电编码器需要有+5 V的电压,功率驱动模块需要有12V电压,电机额定电枢电压和励磁电压为24V。本课题中选用了4个12V的蓄电池,分为两组,一组串联为电机提供驱动,一组通过电源模块为控制器和传感器供电。
2)传感器
本课题中采用的光电编码器用来检测机器人移动速度,检测机器人所处环境及状况的是外部传感器,用来摄取环境信息的摄像头,用来检测当前障碍物距离的超声波传感器,有轨引导中使用的电磁感应器,都是外部传感器。
3)控制电路
控制系统中主要采用了ATMEL公司的AT90S8515微控制器,主要因为它有两路PWM输出,非常适合用来控制两个直流伺服电机。控制电路中还包括光电编码器计数模块、串行通讯模块、电机驱动模块、按键模块等。
4)CCD摄像机及镜头
CCD摄像机采用台湾敏通公司生产的MINTRON6482PD型摄像机,工作电压为直流12V。将它安装在移动机器人的正前方,镜头的视场范围为车体前方大约0.5米到10米。摄像机安装在车体前端的柱子上,高度可以自由调节,镜头的安装位置根据目标的质心高度来定,考虑到搜索目标主要是地面目标,镜头稍微向下倾斜。为了使目标成像能有一定的清晰度,本课题中选用了焦距为6mm的固定焦距镜头,有很大的景深,调好像距范围后,就能使目标在镜头前0.9~10m的范围内有良好的清晰度。
1.2 机器人控制系统设计
1.2.1 控制系统结构
本文主要研究移动机器人系统的移动控制,未涉及机械手操作等特定任务实现控制。移动机器人系统本身对位置伺服的要求比较高,对速度也有一定的控制要求,所以一般都采用闭环控制。控制系统结构框图如图2所示。
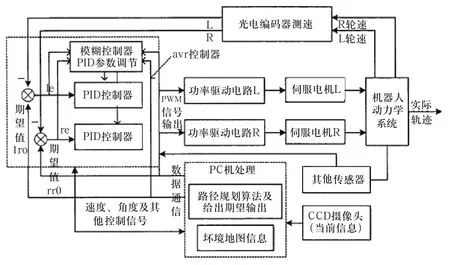
图2 移动机器人控制系统结构框图
1.2.2 AT90S8515控制器介绍
AT90S8515是基于AVR增强性能、RISC结构的低功耗、CMOS技术、八位微控制器(Enhanced RISC Microcontrollers)。AVR核为32个通用寄存器与丰富指令集。32个寄存器全部与运算逻辑单元连接,使得可以在一个时钟周期内执行一条指令访问到两个独立寄存器。
AT90S8515具有8K字节可下载的Flash存储器,512字节的RAM,32条通用I/O线,512字节EEPROM,带比较模式的灵活性定时器,可编程的串行UART,内部及外部中断,带内部晶振的可编程看门狗(WDT)定时器;一个为下载程序而设计的SPI串行口,以及2个可通过软件选择的省电模式。四个8位双向I/O口A,B,C,D,A,B,C口中每个引脚内部都有上拉电阻,输出缓冲器可以吸收20mA的电流,A,C口除可用作通用I/O口功能外,还可以类似51系列一样,使用外部SRAM时,前者作为复用的地址/数据口,后者作为地址输出,D口还具有其它许多功能。
总之,以AT90S8515作为嵌入式高效微控制器,无需额外的程序存储器、数据存储器、PWM控制专用芯片,大为简化了系统的硬件,其内部的看门狗电路及相应指令控制,提高了系统的可靠性和安全性,与51系列单片机相比,性能上要强得多。
1.2.3 硬件设计
课堂中,教师提供实验器材,鼓励学生自主设计实验,小组讨论制定实验方案。同时,教师巡视指导,选取实验方案展示,并组织其他小组进行讨论、补充、修正,确定方案。最后,教师可以选择用表格的形式(表1)直观呈现实验步骤,使学生认识到确定、控制变量与设计实验之间的关系,促进学生对控制变量的理解和运用,帮助其领会实验设计思路,提高科学思维能力。
1)LEC5OE光电编码器及测速
光电编码器俗称码盘,是一种通过光电转换将轴上的机械几何位移量转换成脉冲或数字量的传感器。光电编码器的基本结构由旋转轴上的编码圆盘以及装在圆盘两侧的发光元件和光敏元件组成。圆盘上规则地刻有透光和不透光的线条或孔,当圆盘随着转轴旋转时,光敏元件接收的光通量强弱随着光线条同步变化,光敏元件波形经过整形输出变为脉冲输出。一般圆盘上还设有定相标志,产生零信号,每转一圈产生一个,又称基准脉冲。此外为判断旋转方向,可提供A,B两路相位相差90°的脉冲信号。
本系统中所采用的是增量式光电编码器LEC-2400BM-GOSE作为WMR的速度检测传感器。它的主要技术指标为:
(1)每转输出2400个幅值为5V、占空比为50%的脉冲信号
(2)零位脉冲信号宽度:1±0.5p
(3)信号位置精度:0.1p
2)光电编码器的计数与鉴向
本系统采用的增量式光电编码器,在同等精度下较绝对式编码盘有结构简单、价格便宜,设计硬件电路简单等优点。光码盘主要有两种基本的计量方法,方法一,根据A(B)相脉冲信号的逻辑电平值进行计数操作,并判断出光码盘的运动方向,若为高电平,则认为光码盘正转,计数器加1;若为低电平,则认为光码盘逆转,计数器减1。硬件实现时,该方法只需一组双向可逆计数器。方法二,光码盘正转时,A相脉冲上跳沿对应B相脉冲为高电平,则一组计数器加1;光码盘逆转时,B相脉冲上跳沿对应A相脉冲为高电平,则另一组计数器加1,两组计数器的结果相减即可确定绝对位移量和方向。这种方法需要二组计数器,且不能直接给出方向状态信息或最终方向结果。
1.3.1 键盘扫描程序
键盘扫描程序流程图如图3所示。初始化时将PD4、 PD6定义为输出、高电平,PC4~PC7定义成输入,正常情况下为高电平。当扫描按键时,依次将PD4和PD6置为低电平,读PC4、PC7值,从而识别有无键按下以及哪个键被按下。相应键的功能定义有:启动、停止、直行、绕行、左转弯、右转弯、加速、减速(均在预先设置的速度等信息情况下)。
1.3.2 光电编码脉冲计数转速读取程序
转速读取程序流程图如图4所示。
1.3.3 主控程序
给出程序流程如图所示。系统的初始化在进行Il0口初始化,定时器/计数器初始化,数据参数初始化包括给定转速初始化,默认移动机器人行进方式初始化、PID参数初始化等。程序设计中,为了避免使用浮点数出现大量代码而执行效率低,在数据运算处理中,大多采用整型。在很多情况下,能忽略小数点部分对整个数值的影响,就省略小数点部分,改为整型数。如果中间变量为浮点型且不能忽略小数点,可将中间变量乘以2n或更直观的10n,转换为长整型数,其中乘以2 n可以使用移位方式实现,速度快,而乘以10n生成的代码量较大而速度较慢。在最后运算时除去相应的2n或10n恢复原值。程序经ICE200仿真调试验证无误后,使用RF810编程器写入AT90S8515。
流程图如图5所示。
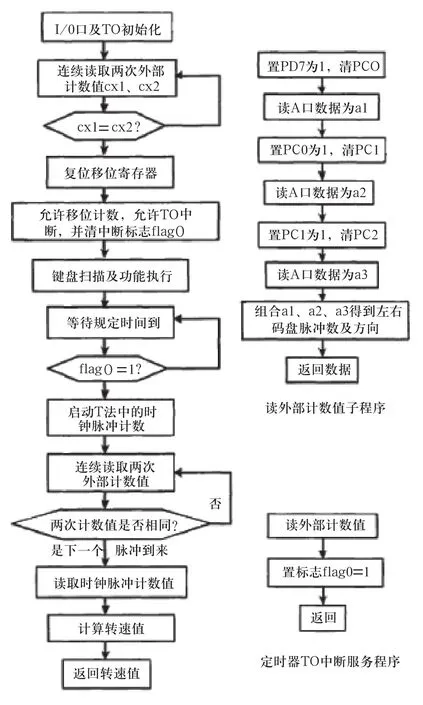
图4 转速读取程序流程图
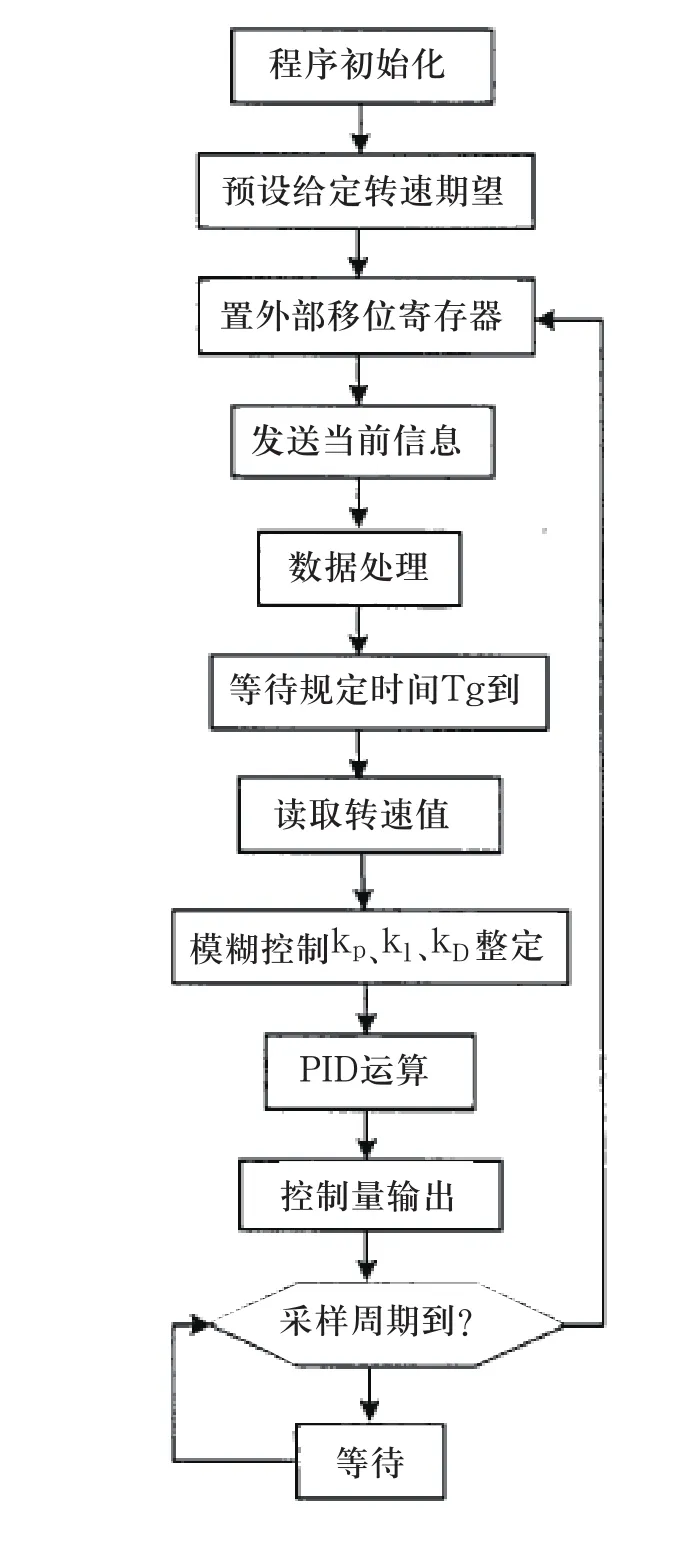
图5 主控程序流程
2 结束语
机器人能做许多人类无法做的工作,它无需像人类那样的工作环境,只要机器不坏,可以长时间的进行工作。但机器人在自由度,灵巧度,传感能力等方面有其局限性,相信在不断的发展中,这些方面将得到逐步的改善。
[1]吴瑞详.机器人技术与应用[M].北京:北京航空航天大学出版社,2000.
[2]蒋新松.机器人与工业自动化[M].石家庄:河北教育出版社,2003.
[3]朱世强.机器人技术与应用[M].杭州:浙江大学出版社,2000.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
煤气与热力(2022年2期)2022-03-09
山西电子技术(2022年1期)2022-02-28
湖北师范大学学报(自然科学版)(2020年2期)2020-06-30
科技传播(2019年15期)2019-08-22
制造技术与机床(2017年3期)2017-06-23
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
科技创新与应用(2016年7期)2016-10-21
小猕猴学习画刊(2016年6期)2016-05-14
