
基于DSP的无刷直流电动机控制系统
2011-02-19 07:50朱贵宪
制造业自动化 2011年3期
朱贵宪
ZHU Gui-xian
(安阳工学院 计算机科学与信息工程系,安阳 455000)
0 引言
随着大功率开关器件、集成电路及高性能的磁性材料的进步,采用电子换相原理工作的无刷直流电动机得到了长足的发展。许多小型无刷直流电动机,在应用时往往需要精确的速度控制,尤其在高速运行场合,对信号反馈控制灵敏度的要求更为严格。而传统的微处理器如MCS-51、96系列在实现控制时,由于处理速度慢(微秒级),乘除法所用周期过多,外围电路数据转换速度慢,使无刷电动机的性能得不到充分发挥。美国TI公司TMS320LF2407A集数字信号高处理能力及适用于电动机控制的优化的外围电路于一体,可以为高性能转动控制系统提供可靠高效的信号处理与控制硬件。
1 PID技术在电动机控制系统中的应用
在绝大多数工业控制中,使用最多的控制方法一般是PID控制算法。虽然当前控制理论和控制技术在信息技术、集成电路技术的高速发展的推动下有了很 大的发展,但是PID控制作为一种稳定的、可靠的、实现简单的算法仍然得到了广泛的应用。随着计算机技术的发展,在传统的模拟PID控制基础上,出现了很多改进的数字PID算法,如微分先行PID控制、积分分离PID控制等。对于数字PID控制算法又可分为位置式PID控制算法和增量式PID控制算法。
将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,这样的控制器称为PID控制器。PID控制器分为模拟式PID控制器和数字式PID控制器。
首先设计一个数字PID控制器,现在假定它是一个对电机速度进行PID控制的系统,如图1所示为PID控制器的原理框图。

图1 PID控制器的原理框图
图中r(t)是电机速度设定值,c(t)是电机转速实际测量值,e(t)是输入控制器的偏差信号,u(t)是控制器输出的控制量,则PID控制算式如(1)式所示:

1)式中KP为比例增益系数,起比例调整作用;Ti是积分时间常数,它决定了积分作用的强弱;Td是微分时间常数,它决定了微分作用的强弱。在PID控制的三种作用中,比例作用可对系统的偏差做出及时响应;积分作用主要用来消除系统静差,改善系统的静态特性,体现了系统的静态性能指标;微分作用主要用来减少动态超调,克服系统振荡,加快系统的动态响应,改善系统的动态特性。上面(1)式是模拟形式的PID控制算式,现在采用LF2407A实现数字PID控制,则对上式离散化,得到PID控制的离散形式,如下面(2)式所示:

2)式中Ts为采样周期,这是位置式PID控制算式,为了增加控制系统的可靠性,采用增量式PID控制算式,即让LF2407A只输出控制量u(k)和增量 ∆u(k)。(2)式是第k次PID控制器的输出量,那么第 k-1次PID控制器的输出量如下面(3)式所示:

所以增量式PID控制算式如下面(4)式所示,Kd为微分增益系数。
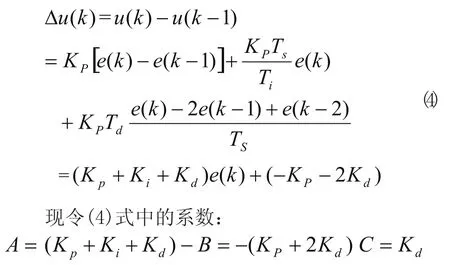
则最后结果形式如下面(5)式所示:

方程式(5)式就是本系统控制程序中用到的增量式PID控制算式,增量式PID控制与位置式PID控制相比仅是算法有所改变,但是它只输出增量,减少了DSP误操作时对控制系统的影响,而且不会产生积分失控。
2 无刷电动机的DSP控制系统设计
基于DSP的无刷直流电动机控制系统主要由DSP接口电路、功率驱动、三相逆变、逻辑控制电路及保护电路等组成,其控制系统硬件的构成如图2所示。
本系统采用PWM方式实现对无刷电动机的控制。其基本原理是交流输入经过整流、稳压后为逆变电路提供直流电源。转速给定由DSP的ADC口输入,经片内的A/D转换单元将模拟信号转化为数字信号。根据给定的速度信号,DSP产生一定的PWM波。通过调整PWM波宽度控制功率管的开关时间,实现对无刷直流电动机的控制。同时一旦产生故障,通过故障保护电路,封锁PWM的输出直至故障取消。
3 无刷电动机控制策略
由于无刷电动机相当于具有三片换向片的直流电动机。因此与直流电动机具有相似的简单的转矩与反电势公式,根据公式可以对无刷电动机进行有效的转矩和速度控制。

转矩公式为

(8)式中N为电动机每相的匝数;l为转子的长度;B为转子的磁通密度;ω为电动机的角速度;L为自感系数;θ为转子的转角;R为相电阻;i为电动机电流。
在转矩公式中,前两相为磁阻转矩部分,第三相为电磁转距部分,也就是由无刷直流电动机产生的转矩部分。通过公式可以看出,无刷电动机的感应电势与电动机的转速成正比,转矩与相电流成正比。由此可得到无刷电动机速度与电流控制框图,如图3所示。从图3可以看出,给定转速与速度反馈量形成偏差,经速度调节后产生电流参考量,它与电流反馈量的偏差经电流调节后形成PWM占空比的控制量,实现电动机的速度控制。
3.1 位置检测和速度检测
位置信号是通过三个霍尔传感器得到的,每一个霍尔传感器都能够产生180°脉宽的输出信号。三个霍尔传感器的输出信号互差120°相位差。这样它们在每个机械转中共有六个上升或者下降沿,正好对应着六个换相时刻。将DSP设置为双沿触发捕捉中断功能,就可以获得这六个时间。
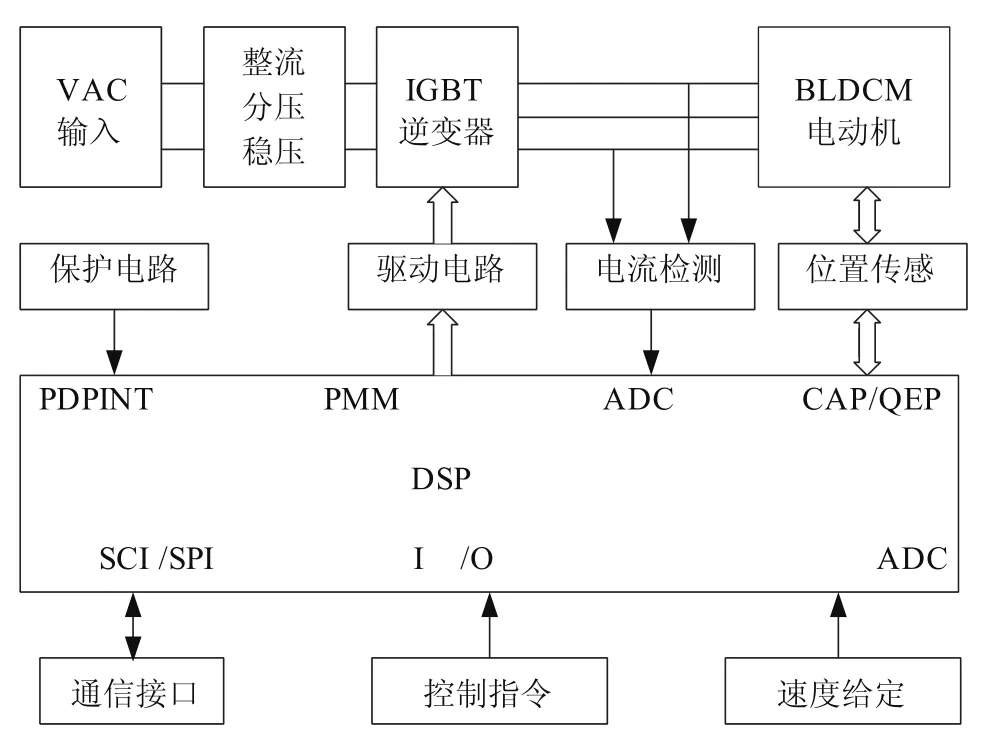
图2 系统框图
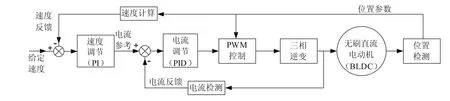
图3 基于TMS320LF2407A DSP的PID控制器实现框图
通过将DSP的捕捉口CAP1~CAP3设置为I/O口、并检查它们的电平状态,就可以得到哪一个霍尔传感器触发捕捉中断,即:捕捉口的电平状态提供换相信息。每个机械转有六次换相,每转过60°机械角就有一次换相。测得两次换相所间隔的时间∆t,根据式(8)就可以计算出两次换相之间间隔时间的平均角速度。

数据∆u(k)是从捕捉中断发生时读定时器2的T2CNT寄存器的值来获得。然后,得到速度值作为速度反馈量参与速度调节计算。
3.2 电流检测
位于桥式整流电路的低电压端与地之间的高精度采样电阻R用于检测主回路上的电流,每隔一个PWM周期对电流采样一次。因为在PWM周期的“开”的瞬间,电流上升并不稳定,也不易采样。所以电流采样时刻应该在PWM周期的“开”期间的中部。所以,通过DSP定时器采用连续增减技术方式时周期匹配时间启动ADC转换来实现。采样电阻上的电压经过DSP的ADC单元,变为数字的电流信号。在新PWM波产生之初,载入电流检测值,与给定的参考电流值一起来控制PWM波宽度,产生新的PWM波。同时,当电流检测值超过所允许的最大值即主电路过电流的时候发出中断信号,产生中断,执行相应的中断处理程序就可以启动过流保护程序,封锁所有驱动信号的输出,直至故障排除。
3.3 转速调整
反馈的速度信号与给定的速度信号相减得到速度差,通过一简单的PI算法可得到新的参考电流:

(9)式中Id为速度调节器的输出电流;Kp为比例系数;Ki为积分系数;T为速度采样周期;Ek为当前时刻感应电势值;Ek-1为前一时刻感应电势值。
3.4 电流调整
电流的调整过程也就是PWM信号产生的过程。通过调整PWM波的宽度就可以调整电流平均值,PWM波的宽度由参考电流Ir与检测电流Im的电流差决定。

(10)式中Ie为参考电流与检测电流的电流差;(11)式中dn为调整后的脉冲占空因数,d0为调整前的脉冲占空因数,K为与电动机参数和主线电压和电流有关的比例系数,在电动机与逆变器类型一定时是常数。
Ie经过PID调节器产生一定宽度的PWM波。电流误差Ie的大小正负决定了PWM波的宽度。当 Ie为零时,PWM的宽度不变,当Ie过大即参考电流大于实际电流很多,使得PWM宽度大于控制周期时,就令PWM的宽度为控制周期,此时输出最宽的PWM波以最快地增大转速;当Ie过小(为负值)即参考电流小于实际电流很多,使PWM宽度小于零,就令PWM的宽度为零,此时以最快的速度降低转速。由DSP输出的六相PWM波,经由功率驱动电路控制功率逆变器晶体管的开关模式,进而控制无刷直流电动机的转矩和转速。
4 结论
实验证明,基于TMS320LF2407A 的无刷直流电动机控制系统,遵循上述基本控制策略对无刷直流电动机进行控制,可以得到良好的控制性能及动态特性,具有广阔的应用前景和推广价值。
[1]刘和平,等.DSP原理及电机控制应用[M].北京航空航天大学出版社,2006.
[2]谢瑞和.摩托罗拉微控制器与嵌入式系统基础[M].清华大学出版社,2003.
[3]张卫宁.TMS320C2000系列DSP原理及应用[M].国防工业出版社,2001.
[4]张雄伟,等.DSP芯片原理与应用[M].机械工业出版社,2005.
[5]贾新力,等.基于DSP的转速测量[J].科技信息,2008.
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
通信电源技术(2016年1期)2016-04-16
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
医学研究杂志(2015年5期)2015-06-10
人生十六七(2015年5期)2015-02-28
中国塑料(2014年12期)2014-10-17
