认知不确定性的谐波齿轮减速器可靠性分析研究
2011-02-10 05:45:36肖宁聪黄洪钟何俐萍李海庆
电子科技大学学报 2011年3期
杜 丽,肖宁聪,黄洪钟,何俐萍,李海庆
(电子科技大学机械电子工程学院 成都 611731)
随着航天技术的发展,高可靠及长寿命航天产品已成为共同需求和发展趋势。目前,在航天器设计中,一般均要求其可靠工作时间为10年、15年甚至20年以上,对航天器可靠性分析和设计提出了严峻的挑战。
太阳翼驱动机构和天线指向机构是卫星的常用机构[1]。由于谐波齿轮减速器具有承载能力高、质量轻、回差低(或是接近零回差)、减速比范围大等特点[2-3],被广泛地应用于太阳翼驱动机构和天线指向机构中。谐波齿轮减速器的可靠性在一定程度上决定了驱动机构和指向机构的可靠性。
目前,国内外已经对谐波齿轮减速器的运动原理、运动精度、建模等[2,4]进行了广泛研究。然而,对谐波齿轮减速器进行寿命估计时,国内外的相关设计手册大多将影响谐波齿轮寿命的相关参数设为固定值[5],这可能会带来极大的误差。如谐波齿轮减速器的额定输出力矩通常在某个值的周围变动,从而允许在某些情况下输出力矩可以发生改变。此外,航天器中使用的谐波齿轮减速器运行环境恶劣,且初始数据中通常包含着大量的主观信息。综上所述,单纯的基于概率(随机)的可靠性分析方法已不能很好地解决这类实际工程问题,需要一种能同时考虑认知不确定性和客观不确定性的可靠性分析方法。
近10余年来,有关学者研究并考虑认知不确定性和客观不确定性的可靠性分析方法。文献[6]提出了一种区间变量及随机变量同时存在时基于一阶可靠性方法(first order reliability method,FORM)的统一不确定性分析方法。文献[7]提出了在混合变量下的系统可靠性分析方法,用模糊数描述系统认知不确定性。然而,这些方法在处理方式和求解效率方面尚存在着许多不足。本文以航天器中使用的谐波齿轮减速器为研究对象,应用区间分析,提出一种同时处理认知不确定性和客观不确定性的系统可靠性建模方法。为了说明该方法的有效性,采用蒙特卡罗洛仿真方法(Monte Carlo simulation, MCS)进行验证,并对模型中的参数进行灵敏度分析。
1 不确定信息的表示和运算
1.1 基于概率的客观不确定性表示
在实际工程中,不确定性信息随处可见。在可靠性分析中,不确定性信息主要分为客观不确定性和认知不确定性两大类[8]。客观不确定性是事物固有的、本质上的不确定性,可以用概率方法如分布函数等来描述,这类不确定性是不能消除的。
1.1.1 贝叶斯估计
设随机矢量X的概率密度函数为f(X),f(X)属于概率密度函数空间fΘ,其定义为:

设某随机参数θ的先验密度为π()θ,随机变量X的联合密度函数为p(x|)θ,则参数θ的后验密度函数[9]为:

式中,m(x)为边缘密度函数。
由于m(x)不依赖于θ,在计算θ的后验分布中仅起到一个正则化因子的作用,如果把m(x)省略,则贝叶斯公式[9]改写为:


式中,G(X)为系统功能函数;X为系统随机矢量。设随机矢量的联合概率密度函数为f()
式中,∝为不依赖于θ的常数因子。
1.1.2 一阶可靠性方法(FORM)
在可靠性分析中,系统的失效概率定义为:XX,则系统失效概率为:

一般情况下,直接用式(4)进行求解是不可行的。用FORM计算系统的失效概率分为[10]:


式中,Φ(i)为标准正态累积分布函数。
用FORM求解系统的可靠度,主要为搜索极限状态方程的MPP点。而MPP点搜索是一个循环迭代的优化过程,需要大量的计算时间。在某些时候,极限状态方程可靠性设计点不只一个,或是根本搜索不到该方程的设计点。另外,如果功能函数的非线性高,形式复杂,求解其导数是非常繁琐的。而基于样本的仿真法,对极限状态方程没有特别要求,也不要求功能函数存在导数,更不需要搜索极限状态方程的MPP点,因此,在求解算法上具有一定的便利性和很好的鲁棒性。由于对系统失效贡献最大的样本点为MPP点和在极限状态方程边界周围的点[12],故在选择样本点时,仅考虑在极限状态方程周围的点就可以使以下方程成立,有:

1.2 基于区间的认知不确定性表示
认知不确定性也称为主观不确定性,处理认知不确定性常用的分析方法主要有贝叶斯方法、可能性理论、证据理论、区间方法和不精确概率等。由于区间方法的直观性和方便性,本文拟采用区间来表示认知不确定性。
一个有界的区间可以表示为:

常用的区间运算通常包括并运算、平均运算、权值混合运算3种。

2 概率-非概率可靠性混合模型
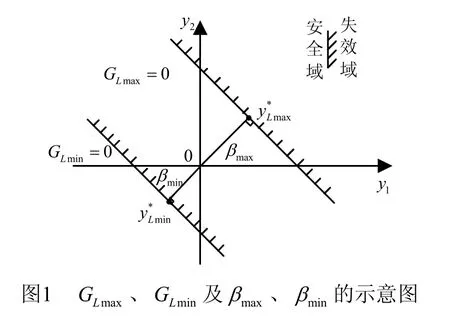
2.1 基于区间分析的可靠性模型

2.2 概率-非概率可靠性混合模型

3 航天器用谐波齿轮减速器可靠性分析
3.1 谐波齿轮减速器的组成及传动原理
谐波齿轮减速器由波发生器(wave generator)、柔轮(flexspline)和刚轮(circular spline)等3个基本构件组成[3],如图2所示。
谐波齿轮减速器利用柔性元件的弹性变形转换传递运动和力矩。柔轮在凸轮的作用下产生变形,从而使波发生器长轴两端的柔轮轮齿与刚轮轮齿完全啮合,而短轴处轮齿完全脱开。在波发生器短轴和长轴之间,有的轮齿逐渐进入啮合状态,成为啮入;有的逐渐进入脱开状态,成为啮出。由于波发生器连续转动,使啮入、啮合、啮出、脱开4种情况依次变化,从而实现减速器连续转动[3]。

图2 谐波齿轮减速器组成示意图
3.2 谐波齿轮减速器可靠性建模
通常情况下,谐波齿轮减速器的寿命主要由柔轮决定,谐波齿轮减速器的寿命估计为[5]:

式中,Lh为预计寿命;TH为额定输出转矩;NV为实际输入转速;T为输出轴名义转矩;KA为工况系数。
根据应力-强度干涉模型,谐波齿轮减速器的功能函数为:

当G>0时,系统可靠;当G<0时,系统失效。系统的极限状态方程为G=0。
3.3 混合模型的可靠性分析


4 可靠性灵敏度分析
可靠性灵敏度定义为失效概率对均值和方差的偏导数,它反映了随机变量的均值和方差对结构可靠性的影响程度[13]。当随机变量均服从正态分布时,变量Xi的可靠性灵敏度[10]为:



灵敏度分析结果能够为可靠性设计提供指导,使设计人员明确某个参数对系统失效概率的影响最大。当灵敏度为正数时,参数变大将导致系统失效概率变大,为负数时,则参数变大会导致系统失效概率变小,所以在设计时要严格控制灵敏度为正的大参数的变化范围。
5 算例仿真

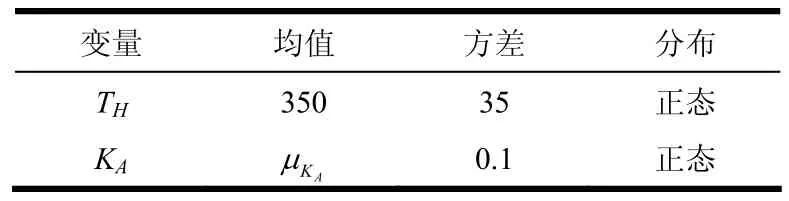
表1 谐波齿轮减速器的参数分布

表2 谐波齿轮减速器参数估计及其运算结果
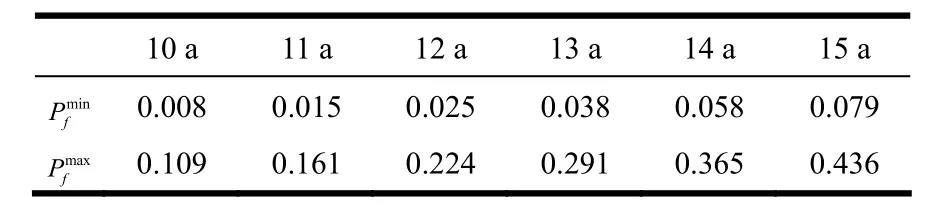
表3 谐波齿轮减速器失效概率上下界随时间变化关系
由表3可知,当设计寿命为15年时,采用寿命估算式(17)中各参数为固定值对谐波齿轮减速器进行可靠性分析,得出系统可靠的结论;然而在同时考虑认知不确定性和客观不确定性时,得出系统的最大失效概率为0.436,最小失效概率为0.079。
为了估计本文方法的计算精度和验证该方法的正确性,本文采用大样本蒙特卡罗仿真方法对其进行验证,其样本量为106。通过仿真,得到计算结果的最小误差为0.001,最大误差为0.014,其系统失效概率上下界与可靠度上下界及其蒙特卡罗仿真结果如图3和图4所示。图中,本文提出的方法(proposed method)记为PM,蒙特卡罗仿真记为MCS。
由图3和图4可知,本文所提出的方法与大样本蒙特卡罗模拟得出的结果非常接近。然而,蒙特卡罗模拟法一般需要较多的样本数据才能得出较为准确的结果,同时需要花费大量的计算时间,消耗大量的计算资源;而本文所提出的方法只需要少量的重要样本点就可以较精确地得出系统极限状态方程的近似线性超平面方程。当表2中的区间变量取并运算时,其计算和仿真结果与区间变量取平均运算时一致,不再赘述。
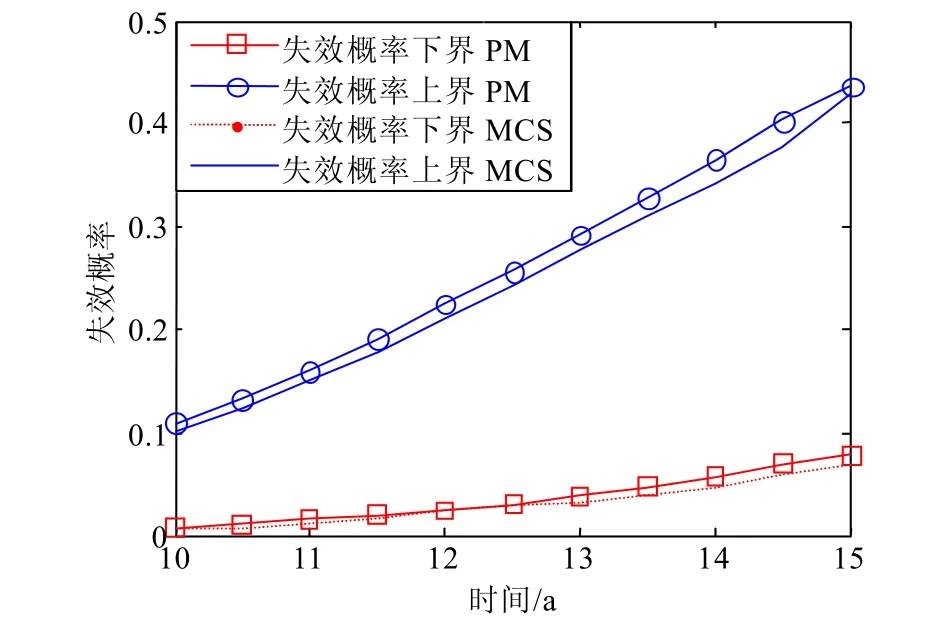
图3 用蒙特卡罗和本文方法得出的系统失效概率的对比图

图4 用蒙特卡罗和本文方法得出的系统可靠度的对比图
谐波齿轮减速器可靠性灵敏度分析的计算结果如表4所示。由表4可知,各参数的灵敏度计算结果随寿命的变化非常小,而且一旦确定了可靠性模型和参数分布概率密度函数,参数的灵敏度就是一个不变的值。从分析结果可知,参数中实际输入转速对系统的可靠性影响最大。

表4 谐波减速器相关参数灵敏度计算结果
6 结 论
本文介绍了不同信息来源的不确定性的处理办法,研究了认知不确定性和客观不确定性同时存在时的概率-非概率可靠性混合模型,建立了航天器用谐波齿轮减速器的可靠性分析模型,并对模型中的参数进行了灵敏度分析。由于认知不确定性的影响,谐波齿轮减速器随时间变化的可靠度和失效概率是一个区间而不是一个精确的值。当区间变量和随机变量同时存在时,搜索方程MPP点是一个双重优化迭代过程,需要大量的计算资源和时间,在某些时候,方程的可靠性设计点不只一个,有时甚至根本搜索不到MPP点。因此,基于搜索MPP点的可靠性分析方法的效率和鲁棒性都不高。由于本文所提出的方法不用搜索极限状态方程的MPP点,因此有较高的计算效率和鲁棒性。该方法可以推广到其他领域的可靠性分析中。
[1] 屠善澄. 卫星姿态与动力学控制[M]. 北京: 中国宇航出版社, 2006.
TU Shan-cheng. Satellite attitude and dynam ic control[M].Beijing: China Astronautic Publishing House, 2006.
[2] GHORBEL F H, GANDI P S, ALPETER F. On the kinematics error in harmonic drive gears[J]. Journal of Mechanical Design, 2001, 123(1): 90-97.
[3] 周晖, 温庆平, 张伟文. 谐波减速器在空间飞行器中的应用[J]. 真空与低温, 2004, 10(4): 187-192.
ZHOU Hui, WEN Qing-ping, ZHANG Wei-wen. Harmonic drive used in spacecraft[J]. Vacuum & Cryogenics, 2004,10(4): 187-192.
[4] TAGHIRAD H D, BELANGER P R. Modeling and parameter identification of harmonic drive systems[J].Journal of Dynamic Systems, Measurement and Control,2009, 120(4): 439-444.
[5] 张黎骅, 郑严. 新编机械设计手册[M]. 北京: 人民邮电出版社, 2008.
ZHANG Li-hua, ZHENG Yan. New machine design handbook[M]. Beijing: People Posts & Telecomunications Publishing House Press, 2008.
[6] DU X. Unified uncertainty analysis by the first order reliability method[J]. Journal of Mechanical Design, 2008,130(9): 1-10.
[7] ADDURI P R, PENMETSA R C. System reliability analysis for mixed uncertain variables[J]. Structural Safety, 2009,31(5): 375-382.
[8] KIUREGHIAN A D. Analysis of structural reliability under parameter uncertainties[J]. Probabilistic Engineering Mechanics, 2008, 23(4): 351-358.
[9] 茆诗松. 贝叶斯统计[M]. 北京: 中国计量出版社, 1999.
MAO Shi-song. Bayesian statistics[M]. Beijing: China Metrology Publishing House, 1999.
[10] GUO J, DU X. Reliability sensitivity analysis w ith random and interval variables[J]. International Journal for Numerical Methods in Engineering, 2009, 78(13):1585-1617.
[11] MELCHERS R E. Structural reliability analysis and prediction[M]. 2nd ed. New York: Wiley, 1999.
[12] MELCHERS R E, AHAMMED M. A fast approximate method for parameter sensitivity estimation in Monte Carlo structural reliability[J]. Computers and Structures, 2004,82(1): 55-61.
[13] LU Z Z, SONG S F, YUE Z F, et al. Reliability sensitivity method by line sampling[J]. Structural Safety, 2008, 30(6):517-532.
[14] 郭书祥, 吕震宙, 冯元生. 基于区间分析的结构非概率可靠性模型[J]. 计算力学学报, 2001, 18(1): 56-60.
GUO Shu-xiang, LÜ Zhen-zhou, FENG Yuan-sheng. A non-probabilistic model of structural reliability based on interval analysis[J]. Chinese Journal of Computational Mechanics, 2001, 18(1): 56-60.
[15] 郭书祥,吕震宙. 结构可靠性分析的概率和非概率混合模型[J]. 机械强度, 2002, 24(4): 524-526.
GUO Shu-xiang, LÜ Zhen-zhou. Hybrid probabilistic and non-probabilistic model of structural reliability[J]. Journal of Mechanical Strength, 2002, 24(4): 524-526.
[16] 邱志平, 王晓军. 结构灵敏度分析的区间方法[J]. 兵工学报, 2005, 26(6): 798-802.
QIU Zhi-ping, WANG Xiao-jun. An interal method for sensitivity analysis of structures[J]. Acta Armamentarii,2005, 26(6): 798-802.
编 辑 黄 莘
猜你喜欢
法律方法(2022年2期)2022-10-20 06:41:56
铁道通信信号(2019年10期)2019-11-25 09:40:54
中国外汇(2019年7期)2019-07-13 05:45:04
军事文摘(2018年24期)2018-12-26 00:57:40
制造技术与机床(2018年12期)2018-12-23 02:40:50
成都信息工程大学学报(2017年1期)2017-07-21 14:14:11
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
现代商贸工业(2016年35期)2016-04-09 06:59:58
探测与控制学报(2015年4期)2015-12-15 15:00:48
河南科技(2014年15期)2014-02-27 14:12:33