计算机视觉技术在放射治疗中设备的应用和发展
2011-01-26 07:43罗广文
中国医疗器械杂志 2011年6期
【作 者】罗广文
1 中山大学肿瘤防治中心,广州,510060
2 华南肿瘤学国家重点实验室,广州,510060
1 计算机视觉技术简介
计算机视觉是一门新兴的发展迅速的学科,从20世纪80年代以来,它的研究已经历了从实验室走向实际应用的发展阶段。从简单的二值图像处理到高分辨率多灰度的图像处理,从一般的二维信息处理到三维视觉机理以及模型和算法的研究,都取得了很大的进展。而计算机工业水平的飞速提高以及人工智能、并行处理和神经元网络等学科的发展,更促进了机器人视觉系统的实用化和涉足许多复杂视觉过程的研究。一个典型计算机视觉系统包含摄像机和镜头、光源、图像采集卡、计算机、检测软件、数字I/O和网络连接等部分。计算机视觉系统根据输入输出结构,可以分为图像采集部分,数字图像处理部分和输出部分,而数字图像处理部分是计算机视觉系统的核心部分。目前,数字图像处理的方法,主要有几何处理、算术处理、图像增强、图像复原、图像重建、图像编码、图像识别和图像理解等。
计算机视觉系统具有精确性好、重复性好、速度快、客观性好和成本合理等优点。计算机视觉技术正在被广泛地应用于许多方面,可以说需要人类视觉的场合几乎都有计算机视觉的应用,特别是在许多人类视觉无法感知的场合,如在精确定量感知、危险场景感知和不可见物体感知等场合,计算机视觉更能显示其无可比拟的优越性。计算机视觉应用涉及到工业自动化生产、航空航天、医学图像分析、机器人视觉和自动导航装置、交通监察和安全鉴别、国防系统等多个领域[1][2][3]。
2 计算机视觉技术在放射治疗中的应用
放射治疗从三维适形放射治疗(3DCRT)发展到调强放射治疗(IMRT),图像引导放射治疗(IGRT)也更多地应用到临床治疗,因此越来越多与IMRT、IGRT相关的新型设备投入到临床,计算机视觉技术凭借其精度高、重复性好、速度快、无接触式检测等优势在这些设备用得到了应用。目前采用计算机视觉技术的放射治疗设备有多页准直器(Multi-Leaf Collimator ,MLC),呼吸运动监测装置,病人三维立体定位装置等,下文对上述三个方面的应用分别举例阐述。
2.1 多页准直器(MLC)
MLC最初设计主要用于替代射野挡块,形成不规则射野,提高治疗效率。照射过程中,计算机根据处方要求控制叶片的运动,实现静态MLC和动态MLC调强治疗。目前MLC已经成为医用加速器治疗准直器的标准配置。MLC的构成单元一般是由钨或合金制成的单个叶片,MLC一般由20~60对叶片组成[4]。根据叶片的位置检测方式有电位器、编码器和计算机视觉等多种检测方式。下文通过Elekta Precise加速器(Elekta, Crawley,West Sussex, UK)的 MLC为例,对计算机视觉技术在MLC上的应用进行阐述。
Elekta Precise加速器MLC由40对叶片构成,在每个叶片的末端位置安装反光点,位于准直器的CCD相机实时对MLC进行视频采集。光野灯照射在反光点上,反射光经过光学系统在CCD相机形成亮点图像,Elekta加速器MLC光学系统结构如图1所示。

图1 Elekta加速器MLC光学系统结构图Fig.1 Structure of Elekta Linac MLC
MLC的控制全部由加速器控制系统实现,CCD相机的视频信号通过数字图像处理后,形成512×512像素的图像。叶片反光点和参考点位置由RMX(Realtime Multitasking eXecutive)处理器识别并送到显示处理器显示出来。叶片反光点在图像上的位置,代表叶片的位置信息,如图2所示。四个角落的亮点为参考点,其他较小的亮点为MLC反光点,叶片反光点的位置通过Video Line方式在叶片所在的特定直线上检测,计算得到的亮点坐标即MLC叶片的位置。通过监测四个固定的参考点在图像上的坐标,可以判断光学系统的位置是否发生变化,从而保证MLC叶片位置的有效。

图2 MLC监测得到的图像Fig.2 Captured image of MLC
采用计算机视觉技术对叶片进行检测具有实时性好,无接触,减少治疗头内连接线,方便维修显著优点[5]。
2.2 病人呼吸运动检测
呼吸运动引起人体内部器官的运动,在放射治疗中对图像采集、治疗计划和治疗照射都会产生不利的影响。为了减少上述呼吸运动造成的影响,临床上采用了呼吸门控技术(respiratory-gating techniques)。呼吸门控技术是反复在患者呼吸周期的某个相同的特殊时段的极短时间内进行图像采集和治疗照射,以减少图像采集或治疗时器官的位移,保证其位置的一致性。实现呼吸门控技术前提和基础是能够实时地监测到人体的呼吸信号[6]。Varian公司开发了一套采用计算机视觉技术的实时位置管理系统——Real-Time Position Management (RPM) (Varian Medical Systems,Palo Alto, CA),通过红外相机检测病人呼吸的时间相位,如图3示。

图3 RPM系统采用带标记点的盒子放置在病人腹部获得的图像Fig.3 Image of RPM when the marker block on patient’s abdomen
RPM系统采用在病人的腹部放置带反光标记点的小盒子,使用红外光源照射反光标记点,小盒子随着病人的自由呼吸上下运动,CCD相机采集图像,经过图像处理分析后得到与病人呼吸相关的反光点的位置,从而获得病人的呼吸时相。根据病人的呼吸情况,在特定的相位时发出门控信号,门控信号用于控制CT或加速器进行扫描或照射,从而实现呼吸门控扫描和呼吸门控照射,如图4。
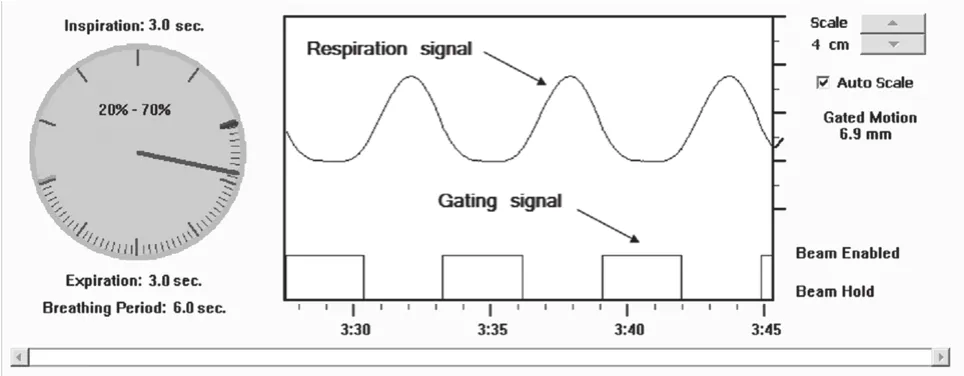
图4 RPM监测得到的呼吸信号与门控信号曲线图Fig.4 Respiratory and gating signal schematic of RPM
RPM与CT连接,将门控信号控制CT扫描,可以实现门控扫描;RPM与加速器相连接,则可以控制加速器射线的启停,仅在肿瘤靶区位于照射野时出束,实现呼吸门控放射治疗。Raquel Wagman和Philippe Giraud等人分别研究了采用RPM呼吸门控放射治疗技术治疗肝部和肺部肿瘤,结果显示RPM呼吸门控治疗具有减小计划边界,可以增加靶区剂量的优势[7][8]。
2.3 病人摆位位置的检测
放射治疗采用分次治疗方式,病人摆位主要通过人工方式摆位,在治疗过程中病人内部器官存在一定的运动,因此会造成靶区剂量与计划剂量之间存在偏差,并导致正常组织接收更多剂量。为了保证多次治疗时病人的位置具有良好的重复性,同时在每次治疗过程中监测到病人位置的变化,需要对病人位置进行监测和修正。随着图像引导放射治疗(IGRT)的应用,临床上通常采用X线拍摄定位片,或治疗前进行锥形束断层成像(CBCT)的方式进行摆位监测,但是采用X线的方式时的不足是病人需要接受额外的X线的照射,而且不适合在治疗过程中连续监测。而采用计算机视觉技术开发的三维体表位置监测设备则具有无接触和无X线辐射损伤的优点,可以连续地监测病人摆位情况,实现分次治疗间和分次治疗内的摆位监控,保证病人摆位的准确性和一致性。
AlignRT(Vision RT, London, UK)采用3D成像技术实现病人体表的3D实时检测,安装在天花板上方的两个3D CCD相机对病人进行视觉图像采集,无需放置标记物即可重建出病人的体表3D图像,如图5示[9]。为了增加图像覆盖率,避免加速器机架与治疗床在不同角度时影响CCD相机图像的采集,在中间位置增加一个CCD相机保证图像的正常采集。该系统称为AlignRT3C,如图6[10]。
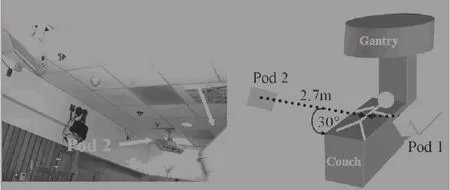
图5 AlignRT相机在加速器机房的安装图Fig.5 AlignRT camera installed in the Linac room
AlignRT采用CT图像或治疗前图像作为参考图像,治疗时图像与参考图像进行比对,获得两者之间的偏差用于修正病人位置,如图7所示[11]。AlignRT的分辨率达到1024×768,可以对20,000个点进行比对。Philipp J等人采用体模和真人进行AlignRT准确性测量,结果显示系统具有很高的稳定性和精确度,体模和真人的测量结果分别为0.40 ± 0.26 mm和1.02 ± 0.51 mm[12]。目前AlignRT已经投入到放射治疗中的胸腹等部位定位,具有良好的应用价值[13-14]。
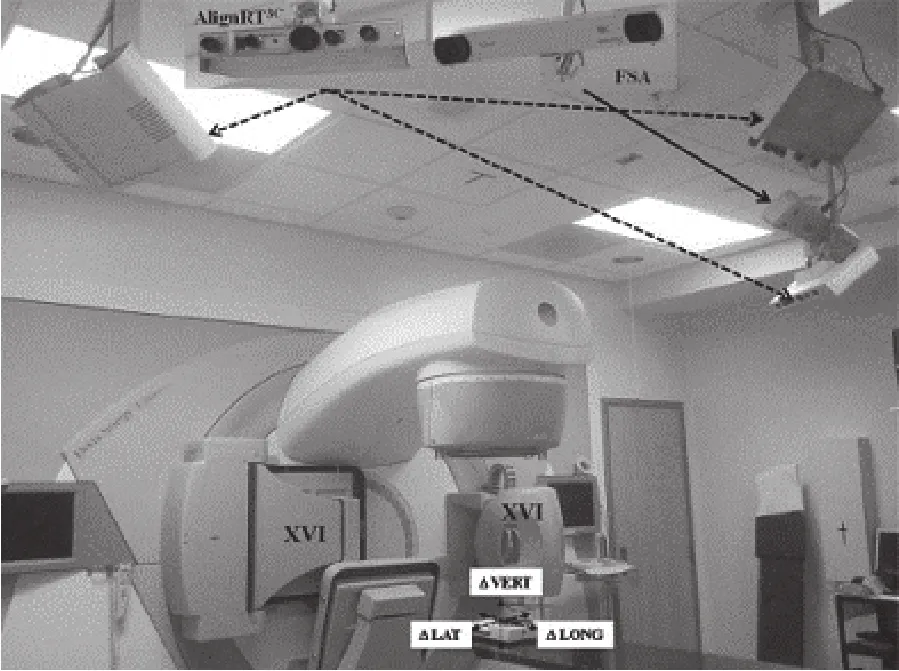
图6 安装在加速器机房天花的AlignRT3CFig.6 AlignRT3C installed in the Linac room

图7 AlignRT的采集图像与参考图像比对Fig.7 Captured and reference image of AlignRT
3 总结
除上述3种放射治疗中应用计算机视觉技术的设备外,还有Brainlab ExactracTM(BrainLAB,Heimstetten, Germany)等应用计算机视觉技术的放射治疗设备,国内外亦有不少文献对计算机视觉技术应用于放射治疗设备的报道[15-17]。在临床实际使用中,充分理解和掌握计算机视觉系统的工作原理,有助于我们更好地运用设备,提高治疗设备的精确度。例如计算机的视觉系统光学部分容易受到光线变化的影响,当光源强度发生变化,或是有外部光线进入均会影响图像监测结果,因此需要保证光线环境的稳定,避免干扰。另外由于无法保证视觉系统的位置长期不变,因此需要进行定期校正(标定),才能保证测量计算结果的准确。
在放射治疗领域采用计算机视觉技术的设备,可以分为加速器部件和病人监测两类,也可以根据图像维数分为二维和三维。二维图像的测量一般采用针孔成像原理,而三维立体成像采用获取的一幅或多幅图像中还原出被摄物体的立体形状,获得三维数据值[18][19]。计算机视觉技术在放射治疗设备中的发展也是由二维向三维立体方向发展,检测的物体形态也由较为简单的若干标记点发展到物体的整个立体表面。在放射治疗设备中计算机视觉二维设备已经广泛地应用在临床科室,而三维的设备也正开始投入到临床应用中。
4 展望
计算机视觉技术在放射治疗设备上的应用是目前研究的热点。在放射治疗设备应用方面,计算机视觉技术具有无接触、精确度高、重复性好和速度快等显著特点和优势,并能获取一些人类视觉上无法获取的信息。因此,利用计算机视觉技术提高放疗设备的精确度、可靠性,提高病人摆位精确度等方面具有广阔的应用前景,对推动放射治疗精确化具有重要的意义。在未来的发展当中,随着计算机视觉技术的发展,计算机视觉技术用于放射治疗设备的前景将更加深入、广阔。
[1] 马颂德, 张正友. 计算机视觉 [M]. 北京: 科学出版社, 1998
[2] 贾云得. 机器视觉 [M]. 北京: 科学出版社, 2000
[3] 霍宏涛, 林小竹, 何薇, 等. 数字图像处理 [M]. 北京: 北京理工大学出版社, 2002
[4] 胡逸民. 肿瘤放射物理学 [M]. 北京, 原子能出版社, 1999
[5] Arthur Boyer, et al. AAPM Report No. 72 Basic Applications of Multileaf Collimators [M]. Med Phys Publishing, Madison Wisconsin, 2001.
[6] Paul J. Keall, Gig S. Mageras, James M. Balter, et al. The management of respiratory motion in radiation oncology report of AAPM Task Group 76 [J]. Med. Phys. 2006, 33(10): 3874-3900.
[7] Wagman R, Yorke E, Ford E, et al. Respiratory gating for liver tumors: use in dose escalation [J]. Int J Radiat Oncol Biol Phys,2003, 55(3): 659-668.
[8] Philippe Giraud, Ellen Yorke, Eric C. Ford, et al. Reduction of organ motion in lung tumors with respiratory gating [J]. Lung Cancer, 2006, 51: 41-51.
[9] Bert C, Metheany KG, Doppke KP, et al. Clinical experience with a 3D surface patient setup system for alignment of partial-breast irradiation patients [J]. Int J Radiat Oncol Biol Phys, 2006, 64(4):1265-1274.
[10] Jean L. Peng, Darren Kahler, Jonathan G. Li, et al. Characterization of a real-time surface image-guided stereotactic positioning system[J]. Med. Phys. 2010, 37(10):5421-5433.
[11] Marco Krengli, Simone Gaiano, Eleonora Mones, et al.Reproducibility of patient setup by surface image registration system in conformal radiotherapy of prostate cancer [J]. Radiation Oncology, 2009, 4(1): 9.
[12] Philipp J, Wolfgang Harms, Gabriele Sroka-Perez, et al., Accuracy of a commercial optical 3D surface imaging system for realignment of patients for radiotherapy of the thorax [J]. Physics in Medicine and Biology, 2007, 52(13):3949-3963.
[13] Gierga DP, Riboldi, M, Turcotte, JC, et.al., Comparison of target registration errors for multiple image-guided techniques in accelerated partial breast irradiation [J]. Int J Radiat Oncol Biol Phys. 2008, 70(4): 1239-46.
[14] Bert C, Metheany KG, Doppke KP, et.al., Clinical experience with a 3D surface patient setup system for alignment of partial-breast irradiation patients [J]. Int J Radiat Oncol Biol Phys. 2006, 64(4):1265-74.
[15] Markus Stock, Kontrisova K, Dieckmann K, et al. Development and application of a real-time monitoring and feedback system for deep inspiration breath hold based on external marker tracking [J].Med. Phys. 2006, 33(8): 2868-2877.
[16] 陶声祥, 吴宜灿. 基于视频的精确放疗摆位系统研究 [J]. 原子核物理评论, 2006, 23(2): 250-253.
[17] 余续刚, 周付根. 基于图像跟踪的呼吸运动分析[J]. 中国体视学与图像分析, 2006, 11(1): 22-26.
[18] 李奇, 冯华君, 徐之海, 等. 计算机立体视觉技术综述 [J]. 光学技术, 1999, 05: 71-73.
[19] 吴焕明, 方漪. 基于计算机立体视觉的图像测量技术 [J]. 工程图学学报, 2002, 4:60-67.
猜你喜欢
现代装饰(2022年5期)2022-10-13
小哥白尼(趣味科学)(2022年5期)2022-08-15
核安全(2022年3期)2022-06-29
少先队活动(2021年6期)2021-07-22
装备制造技术(2020年1期)2020-12-25
中成药(2018年11期)2018-11-24
中国医学装备(2015年10期)2015-12-29
肿瘤预防与治疗(2015年2期)2015-09-26
航空学报(2015年4期)2015-05-07
肿瘤预防与治疗(2014年4期)2014-11-24