基于伪距相位组合实时探测与修复GNSS三频非差观测数据周跳
2011-01-04 07:57李金龙杨元喜徐君毅何海波郭海荣
测绘学报 2011年6期
李金龙,杨元喜,徐君毅,何海波,郭海荣
1.信息工程大学测绘学院,河南郑州450052;2.中国卫星导航定位与应用管理中心,北京100088;3.北京环球信息应用开发中心,北京100094
基于伪距相位组合实时探测与修复GNSS三频非差观测数据周跳
李金龙1,杨元喜2,徐君毅1,何海波3,郭海荣3
1.信息工程大学测绘学院,河南郑州450052;2.中国卫星导航定位与应用管理中心,北京100088;3.北京环球信息应用开发中心,北京100094
三频观测量能形成具有更长波长、更小噪声、更小电离层影响等优良特性的组合观测量,有利于提高周跳探测和修复的精度。推导伪距相位组合探测周跳的阈值条件;提出周跳确定成功率的概念;并从提高周跳确定成功率出发,给出伪距相位组合选取的标准和方法;最后利用一组实测GPS三频数据进行验证。结果表明,在数据采样率较高、历元间电离层延迟变化可忽略时,根据该方法选取的最优伪距相位组合可实时探测和修复三频非差观测数据中的所有周跳。
GNSS;三频;伪距相位组合;周跳探测与修复
1 引 言
GNSS测量数据处理中,周跳探测与修复和整周模糊度解算是GNSS高精度定位的关键问题。目前周跳探测与修复的方法主要有高次差法[1]、电离层残差法[1-3]、多项式拟合法[1-2,4]、多普勒积分法[1,3]、伪距相位组合法[1-6]、拟准检定法[7-8]、Kalman滤波法[9]、小波分析法[10]等。伪距相位组合法由于探测精度高、程序易于实现,研究与应用都比较广泛[6]。伪距相位组合法探测和修复周跳的能力主要取决于电离层延迟和多路径效应在历元间的变化以及伪距和载波相位观测噪声、载波波长的大小等[2-3,6]。单频观测情况下,由于载波波长太短,单频伪距相位组合法估计周跳的精度差,不能检测数值较小的周跳[3]。双频观测情况下,可以利用双频载波观测量获得波长较长的组合观测量以提高周跳估计的精度,例如文献[2]采用波长约为0.86m的(1,-1)组合和波长约为14.65m的(-7,9)组合探测和修复周跳,显著提高周跳估计的精度。但由于(1,-1)组合的波长仍然较短,受伪距观测噪声影响大,因此其探测与修复周跳的精度依然不够理想。
随着GPS的现代化,Galileo和我国的Compass的建成,未来GNSS导航定位将能获得三频观测数据。三频GNSS的显著优点是可以形成具有更长波长、更小噪声、更小电离层影响等优良特性的组合观测量[11-12],将有利于提高周跳探测和修复的精度。文献[13]采用三频无几何相位组合探测周跳,并通过类似LAMBDA算法的方法搜索周跳候选组来确定周跳值,然而无几何相位组合探测周跳存在不敏感周跳组合,且其周跳确定采用搜索方法,程序实现较为复杂;文献[14]研究三频伪距相位组合探测和修复周跳的数学模型,并利用模拟数据比较三频和双频伪距相位组合探测周跳的性能。然而,三频伪距相位组合周跳探测阈值条件、最优伪距相位组合的选取标准以及周跳确认准则等内容研究还不多。本文推导伪距相位组合探测周跳的阈值条件;提出周跳确定成功率的概念;并从提高周跳确定成功率出发,以组合周跳估值标准差最小为原则选取不同伪距噪声条件下的GPS三频最优伪距相位组合;同时对三频伪距相位组合和三频无几何相位组合周跳探测与修复的方法进行对比分析;最后利用一组实测GPS三频数据进行验证。
2 三频伪距相位组合周跳探测与修复模型
2.1 周跳探测
三频伪距、相位组合观测量方程可表示为[11-12,15]
式中,ρ为卫星至接收机的几何距离(包括卫星钟差、接收机钟差、对流层误差等);βabc、βijk分别为伪距组合观测量和相位组合观测量的电离层延迟影响系数,a,b,c∈R,a+b+c=1,i,j,k∈Z;I1为载频f1上的电离层延迟;mabc、mijk分别为伪距组合观测量和相位组合观测量的多路径误差;dabc和dijk分别为伪距组合观测量和相位组合观测量的硬件时延;Nijk和λijk分别为相位组合观测量的模糊度和波长;εabc、eijk分别为伪距组合观测量和相位组合观测量的观测噪声;R、Z分别代表实数集和整数集。由式(1)减式(2)可得

式中,Kijk,abc=(βijk+βabc)/λijk,单位为m-1。将Nijk在相邻历元t1和t0之间求差可得

式中,δ表示在历元t1和t0间求差。由于硬件时延随时间变化缓慢,因此在相邻历元求差时可消除硬件时延项。由于难以对多路径效应建立有效的数学模型,忽略历元间相位多路径延迟变化项、伪距多路径延迟变化项。假设历元间载频f1上电离层延迟变化δI1很小,如果系数Kijk,abc较小,则历元间电离层延迟变化项也可忽略,于是可得历元间相位组合观测量模糊度差估值,即相位组合观测量周跳估值如下[2,14]

假设载波相位观测量之间、载波相位观测量与伪距观测量之间不相关,且前后历元观测量间也不相关,以周为单位的三频载波观测噪声标准差相等为σφ,伪距组合观测量噪声标准差为σabc,则根据式(5)可得δ^Nijk标准差为


式中,l=3、4(分别对应99.7%、99.9%的置信水平),则表明相应相位组合观测量发生周跳。
2.2 周跳估值取整成功率

2.3 周跳确定
为了能探测并修复基础载波周跳,需要三个组合系数线性无关的相位组合观测量,假设其组合系数分别(i1,j1,k1)、(i2,j2,k2)、(i3,j3,k3),相应的组合周跳值分别为δNi1j1k1、δNi2j2k2、δNi3j3k3,则组合周跳值与基础载波周跳值之间的关系如下[14]
式中,δN1、δN2、δN3分别为载频f1、f2、f3上的周跳值。为保证由式(10)能恢复基础载波周跳值,不仅要求H矩阵可逆,而且要求H矩阵的逆矩阵元素也全为整数,即H矩阵是可容许的(H矩阵的矩阵元素全为整数且H矩阵的行列式det(H)=±1)[14,17],从而由x=H-1y即可唯一确定基础载波周跳值。
周跳确定后,利用确定的周跳值修复历元基础载波观测量,并重新计算和如果同时满足,则确认周跳修复正确。
3 最优伪距相位组合的选取
3.1 伪距相位组合选取的标准和方法
由前面的讨论可知,式(7)的完整表达式应为

式中,f(o)=-δmijk+δmabc/λijk+Kijk,abcδI1。由式(11)可知,为减少f(o)项对周跳探测与修复的影响,应选择合适的组合系数(i,j,k):①使λijk尽可能大以减少历元间伪距多路径变化δmabc的影响;②使Kijk,abc尽可能小以减少历元间电离层延迟变化δI1的影响;③使周跳估值标准差尽可能小以确保相位组合观测量周跳确定具有较高成功率。
不失一般性,设f1=c1f0,f2=c2f0,f3= c3f0,其中f0=10.23MHz,则Kijk,abc可表示如下形式
对于GPS,c1=154,c2=120,c3=115,取βabc=1,则Kijk,abc最小等价于表达式10.508(i+1.031j+1.043k)最小,由此可知令|i+j+k|≤2,Kijk,abc取值将较小。
此外,如果能获得三频伪距观测量,则对于选定的相位组合系数(i,j,k),通过给定Kijk,abc限值,可由如下方程的最小范数解来求取伪距组合观测量的最优组合系数(a,b,c)
下面以GPS为例分析伪距相位组合的选取,分析中假设只使用载频f1上的伪距观测值P1,即Pabc=P1,βabc=1.0。根据前面的分析,以λijk>5.0m,|i+j+k|≤2为条件,i、j、k在区间[-10,10]中取值搜索候选组合,搜索结果列于表1。计算中,取σφ=0.01周,针对目前接收机实际P1标准差σε取值分如下三种情况[12]:①σε=0.3m;②σε=0.6m;③σε=3.0m。作为比较,将双频情况下周跳探测与修复常用的两种组合也列于表1中(表中虚线以上部分为双频组合,虚线以下部分为三频组合)。
表1 一些典型的组合Tab.1 Some typical combinations
从表1可看出:
(1)伪距噪声标准差为0.3m和0.6m时,表中所列三频伪距相位组合观测量的周跳估值标准差均小于0.2周,能够以大于98.7%的成功率获得正确的相位组合观测量周跳值,且除组合(0,1,-1)外其余组合观测量周跳估值标准差主要受载波观测噪声影响。
(2)即使伪距噪声标准差仅为0.3m,双频相位组合观测量(1,-1,0)的周跳估值标准差也达到了0.49周,由其周跳估值通过直接取整获取正确周跳值的成功率将小于68.3%,而双频相位组合观测量(-7,9,0)的电离层影响系数较大,比较可知三频伪距相位组合周跳探测与修复的能力优于双频伪距相位组合。
3.2 最优伪距相位组合
为确保周跳确定成功率,将以组合周跳估值标准差最小为原则从上面搜索得到的组合中选取最优伪距相位组合。从式(6)可知,不同相位组合观测量的周跳估值标准差相对大小仅与伪距观测噪声标准差(以m为单位)和载波观测噪声标准差(以周为单位)比值有关。因此,以组合周跳估值标准差最小为原则选取的最优伪距相位组合随伪距观测噪声标准差和载波观测噪声标准差比值的变化而不同。σφ=0.01周时,不同伪距噪声标准差条件下以组合周跳估值标准差最小为原则选取的最优伪距相位组合见表2(表中虚线以上部分)。
作为比较,将文献[13]中给出的三频无几何相位组合也列于表2(虚线以下部分),并给出了同一尺度下三频伪距相位组合与三频无几何相位组合的最大电离层影响系数(第4列)和最大周跳估值标准差(第5列),表中最后两列为l=3、4时三频无几何相位组合200周以内的不敏感周跳组合数量。基于三频伪距相位组合探测周跳,由于三组组合系数线性无关,由式(10)可知,只有三个频率上均未发生周跳时,三个组合周跳值才全为零,否则三个组合周跳值中至少有一个大于等于1周。因此,当三个伪距相位组合的周跳估值标准差均小于0.33周时,理论上(99.7%的置信水平)不存在不敏感周跳组合。

表2 不同伪距噪声条件下的最优相位组合Tab.2 Optimal phase combinations in different pseudo-range noise
从表2可看出:
(1)当伪距观测噪声标准差为0.3m和0.6m时,最优伪距相位组合周跳估值标准差最大的也只有0.14周,由其周跳估值直接取整获取周跳值的成功率将大于99.9%。而当伪距观测噪声标准差为3.0m时,最优伪距相位组合周跳估值标准差最大值为0.21周,由其周跳估值直接取整获取周跳值的成功率大于98.4%。
(2)三频最优伪距相位组合探测周跳在置信水平为99.9%时仍不存在不敏感周跳组合,而三频无几何相位组合除使其周跳探测值为零而无法探测的周跳组合外,当置信水平为99.9%时还存在不敏感周跳组合。由此可知,三频无几何相位组合探测周跳的误探(纳伪)和漏探(弃真)概率将比最优伪距相位组合大。
对于周跳确定,文献[13]中使用三频无几何相位组合探测出周跳后,基于伪距和相位观测量估计基础载波周跳值,并以周跳估值及其协方差确定搜索空间采用类似LAMBDA算法的方法来搜索周跳值。实际上,如果确定周跳估值协方差阵时所使用的伪距噪声标准差和载波噪声标准差与上文3.1搜索伪距相位候选组合时一样,则文献[13]中的降相关变换矩阵和以周跳估值标准差最小为原则选取的最优组合系数组成的H矩阵相同,而且只要给定的伪距噪声标准差和载波噪声标准差比值不变,H矩阵是不变的。因此,不需要每一历元都重新求取降相关变换矩阵,而且降相关变换后的周跳估值标准差与文中最优伪距相位组合周跳估值标准差相同,通过对组合周跳估值直接取整就能以很高的成功率获取正确的周跳值。
4 计算与分析
算例数据为利用Javad接收机于2009-05-17采集的一组GPS三频静态数据,采样间隔为15s。试验中使用的数据为PRN01卫星的L1、L2、L5和C1观测量,使用组合(4,-8,3)、(3,0,-4)、(-3,1,3)来探测和修复周跳。原始数据中不存在周跳,人为在观测序列中加周跳,所加周跳大小及相应组合观测量周跳值见表3。

表3 周跳组合及相应的周跳探测值Tab.3 Cycle-slip groups and corresponding cycle-slip detection values
为更好地测试周跳探测能力,选择在观测时段的开始、中间和结束阶段(卫星处在不同高度角)历元加周跳,且所加周跳组合相应的组合周跳值均为最小值1周。图1为三频伪距相位组合周跳估值序列,图2为三频无几何相位组合周跳探测值序列,图中虚线分别对应于l=3和l=4时的周跳探测阈值,计算时取σφ=0.01周,σε=0.6m。
图1 三频伪距相位组合周跳探测Fig.1 Cycle-slip detection using triple-frequency code-phase combinations
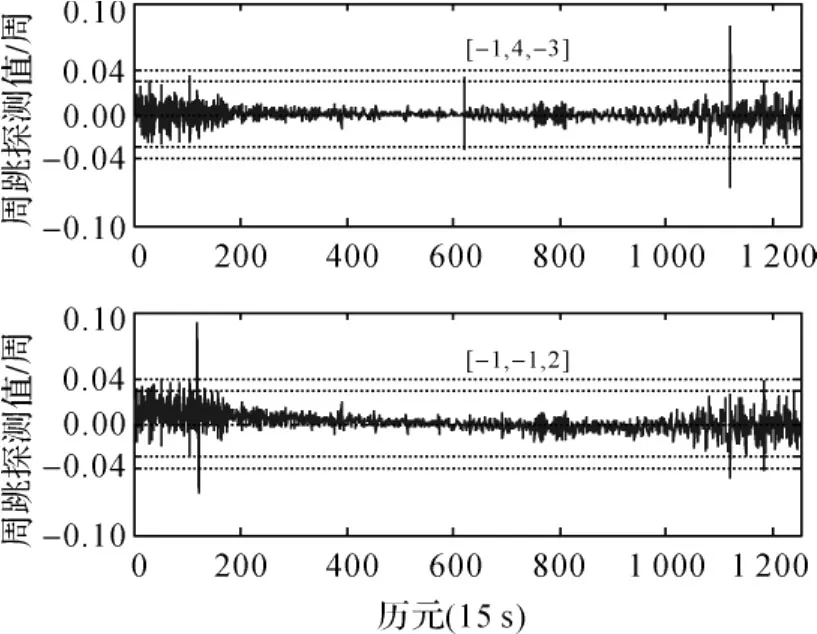
图2 三频无几何相位组合周跳探测Fig.2 Cycle-slip detection using triple-frequency geometry-free phase combinations
从图1和图2可看出,在观测起始和结束时段(卫星高度角低),三频伪距相位组合和三频无几何相位组合周跳探测值序列变化均较大,在无周跳历元也存在少量周跳探测值大于阈值(l=3)的误探情况,而在观测中间时段(卫星高度角高),周跳探测值都远远小于阈值(l=3)。三频伪距相位组合可通过提高周跳探测置信水平(l=4)来减少周跳误探概率,从图1可看出,即使周跳值仅为1周其周跳探测值也大大超过l=4时的阈值,提高探测置信水平并不会引入不敏感周跳组合。然而,提高三频无几何相位组合探测周跳的置信水平(l=4)则会引入不敏感周跳组合从而增加周跳漏探概率,如第620历元周跳探测值就小于l=4时的探测阈值。当然,可以通过实时估计载波观测噪声标准差来计算探测阈值,这样在载波观测噪声标准差较小的情况下能有效减小三频无几何相位组合探测周跳的漏探概率,然而对于使其周跳探测值为零的周跳组合依然无法探测。
周跳确定成功率与所加周跳大小无关,在未加周跳历元时,只要组合周跳估值序列均小于0.5周,则通过对周跳估值直接取整即可获得正确的组合周跳值,从而由式(10)可唯一确定原始载波上的周跳值。本文试验中的1 251个历元,通过对三个伪距相位组合周跳估值直接取整确定组合周跳值的成功率均为100%,三频伪距相位组合和三频无几何相位组合周跳探测与周跳确认的统计结果见表4。
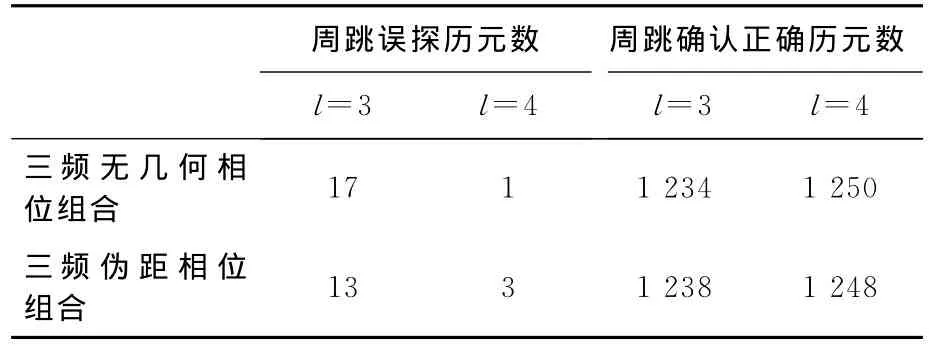
表4 周跳探测与修复结果Tab.4 Results of cycle-slip detection and repair
从表4可看出,l=3、l=4时,三频伪距相位组合的周跳误探历元数和周跳确认正确历元数都与三频无几何相位组合相当,然而三频无几何相位组合由于存在无法探测周跳组合和不敏感周跳组合使周跳探测漏探(弃真)和周跳确认错误(纳伪)概率较伪距相位组合大。
5 结 论
(1)三频无几何相位组合周跳探测具有探测精度高,不受伪距噪声影响等优点,然而由于基于三频相位组合观测量只能形成两个线性无关的无几何相位组合观测量,因而存在不敏感周跳组合,且周跳修复仍需使用伪距观测量采用搜索方法来确定周跳值,程序实现较复杂。
(2)基于三频相位观测量和伪距观测量形成三个线性无关的伪距相位组合观测量,可以探测出组合观测量中仅为1周大小的小周跳,不存在不敏感周跳组合,而且通过将组合周跳估值直接取整就能以很高的成功率获取正确的组合周跳值,从而唯一确定原始载波上的周跳,周跳探测、确定和确认过程同时进行,易于程序实现。
(3)伪距相位组合观测量周跳估值标准差越小,由周跳估值获取正确周跳值的成功率越高,因此在历元间电离层延迟变化可忽略的情况下,最优组合系数的选取应以周跳估值标准差最小为原则,且由此选取的最优组合系数取决于伪距观测噪声标准差和相位观测噪声标准差的比值,而与伪距观测噪声标准差和相位观测噪声标准差大小无关。
(4)由于只使用当前历元和前一历元的观测数据,因此伪距相位组合法可用于周跳的实时探测和修复。三频伪距相位组合探测与修复周跳也存在不足,如周跳探测与修复精度受数据采样率和伪距观测噪声影响,如何使其能探测和修复失锁时间较长的周跳需作进一步研究。
[1] LI Zhenghang,ZHANG Xiaohong.New Techniques and Precise Data Processing Methods of Satellite Navigation and Positioning[M].Wuhan:Wuhan University Press,2009.(李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009.)
[2] LIU Jiyu.The Principle and Method of Navigation and Positioning Using GPS Satellites[M].2nd ed.Beijing:Science Press,2008.(刘基余.GPS卫星导航定位原理与方法[M].第2版.北京:科学出版社,2008.)
[3] HE Haibo.Precise Kinematic GPS Surveying and Quality Control[D].Zhengzhou:Information Engineering University,2002.(何海波.高精度GPS动态测量及质量控制[D].郑州:信息工程大学,2002.)
[4] WEI Ziqing,GE Maorong.The Mathematic Models of GPS Relative Positioning[M].Beijing:Surveying and Mapping Press,1997.(魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1997.)
[5] BLEWITT G.An Automatic Editing Algorithm for GPS Data[J].Geophysical Research Letters,1990,17(3):199-202.
[6] ZHANG Chengjun,XU Qifeng,LI Zuohu.Improving Method of Cycle Slip Detection and Correction Based on Combination of GPS Pseudo Range and Carrier Phase Observations[J].Acta Geodaetica et Cartographica Sinica,2009,38(6):402-407.(张成军,许其风,李作虎.对伪距/相位组合量探测与修复周跳算法的改进[J].测绘学报,2009,38(6):402-407.)
[7] OU Jikun.Quasi-accurate Detection of Gross Errors(QUAD)[J].Acta Geodaetica et Cartographica Sinica,1999,28(1):15-20.(欧吉坤.粗差的拟准检定法(QUAD法)[J].测绘学报,1999,28(1):15-20.)
[8] HAN Baomin,OU Jikun,CHAI Yanju.Detecting and Repairing the Gross Errors and Cycles Slips by QUAD Method[J].Geomatics and Information Science of Wuhan University,2002,27(3):246-250.(韩保民,欧吉坤,柴艳菊.用拟准检定法探测和修复GPS数据中的粗差和周跳[J].武汉大学学报:信息科学版,2002,27(3):246-250.)
[9] HE Haibo,YANG Yuanxi.Detection of Successive Cycle Clips for GPS Kinematic Positioning[J].Acta Geodaetica et Cartographica Sinica,1999,28(3):199-204.(何海波,杨元喜.GPS动态测量连续周跳检验[J].测绘学报,1999,28(3):199-204.)
[10] HUANG Bingjie,LIU Lintao,GAO Guangxing,et al.Detection of Cycle-slip in the GPS Point Positioning Based on Wavelet Transform[J].Geomatics and Information Science of Wuhan University,2006,31(6):512-515.(黄兵杰,柳林涛,高光星,等.基于小波变换的GPS精密单点定位中的周跳探测[J].武汉大学学报:信息科学版,2006,31(6):512-515.)
[11] WU Yue.The Theory and Application on Multi-frequency Data Processing of GNSS 2[D].Wuhan:Wuhan University,2005.(伍岳.第二代导航卫星系统多频数据处理理论及应用[D].武汉:武汉大学,2005.)
[12] LI Bofeng.Theory and Method of Parameter Estimation for Mixed Integer GNSS Function and Stochastic Models[D].Shanghai:Tongji University,2010.(李博峰.混合整数GNSS函数模型及随机模型参数估计理论与方法[D].上海:同济大学,2010.)
[13] ZHEN D,STEFAN K,OTMAR L.Instantaneous Triplefrequency GPS Cycle-slip Detection and Repair[J].International Journal of Navigation and Observation,2009(1):1-16.
[14] XIONG Wei,WU Yue,SUN Zhenbing,et al.Application of Multi-frequency Combination Observation in Cycle Slip Detection and Restoration[J].Geomatics and Information Science of Wuhan University,2007,32(4):319-322.(熊伟,伍岳,孙振冰,等.多频数据组合在周跳探测和修复上的应用[J].武汉大学学报:信息科学版,2007,32(4):319-322.)
[15] HAN S,CHRIS R.The Impact of Two Additional Civilian GPS Frequencies on Ambiguity Resolutions Strategies[C]∥Proceedings of ION Annual Technical Meeting.Cambridge:[s.n.],1999:315-321.
[16] TEUNISSEN P J G.Success Probability of Integer GPS Ambiguity Rounding and Bootstrapping[J].Journal of Geodesy,1998,72(10):606-612.
[17] TEUNISSEN P J G.The Invertible GPS Ambiguity Transformations[J].Manuscripta Geodaetica,1995,20(6):489-497.
Real-time Cycle-slip Detection and Repair Based on Code-phase Combinations for GNSS Triple-frequency Un-differenced Observations
LI Jinlong1,YANG Yuanxi2,XU Junyi1,HE Haibo3,GUO Hairong3
1.Institute of Surveying and Mapping,Information Engineering University,Zhengzhou 450052,China;2.China National Administration of GNSS and Applications,Beijing 100088,China;3.Beijing Global Information Center of Application and Exploitation,Beijing100094,China
In case of triple-frequency signals,there are many combination observations with longer wavelength,smaller noise,smaller ionosphere effect,which may improve the precision of cycle-slip detection and repair.The threshold for cycle-slip detection is deduced,and the success rate of cycle-slip determination is proposed.Criterions and methods for selecting code-phase combination are presented in order to enhance the success rate of cycle-slip determination.At last,experiments are carried out to test the performance of the method using GPS triple-frequency observations.The result shows that optimal code-phase combinations selected by proposed criterions can detect and repair all cycle-slips of triple-frequency un-differenced observations,when ionosphere error between-epoch can be ignored in case of high data rate.
GNSS;triple-frequency;code-phase combination;cycle-slip detection and repair
LI Jinlong(1986—),male,PhD candidate,majors in the algorithms of GNSS triple-frequency precise positioning.
1001-1595(2011)06-0717-06
P228
A
国家自然科学基金(41020144004)
宋启凡)
2010-06-08
2011-05-17
李金龙(1986—),男,博士生,主要从事GNSS三频精密定位算法研究。
E-mail:along0730@163.com
猜你喜欢
测绘学报(2022年5期)2022-05-31
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
中国惯性技术学报(2020年2期)2020-07-24
测绘科学与工程(2017年3期)2017-08-16
雷达学报(2017年6期)2017-03-26
测绘通报(2016年12期)2017-01-06
导航定位学报(2015年2期)2015-06-05