
旋转式井壁取心系统软件设计
2010-12-25 07:34王易安王国平黄明艳
测井技术 2010年5期
杨 亮,王易安,王国平,黄明艳,严 磊
(1.中国石油集团测井有限公司华北事业部,河北任丘062552;2.中国石油集团测井有限公司技术中心,陕西西安710077)
旋转式井壁取心系统软件设计
杨 亮1,王易安1,王国平2,黄明艳1,严 磊1
(1.中国石油集团测井有限公司华北事业部,河北任丘062552;2.中国石油集团测井有限公司技术中心,陕西西安710077)
介绍了旋转式井壁取心系统的组成及其工作原理。针对旋转式井壁取心仪器,设计了地面控制软件,该软件可实时跟踪伽马或0.4 m电极曲线,准确定位取心位置,同时采用时间驱动记录取心过程中泵压等参数。分析了软件中取心深度定位、深度驱动与时间驱动交替运行、网络通讯、双缓冲绘图等关键技术的具体实现。2009年在任91井的实际应用表明,该软件的准确性和实时性达到了旋转式井壁取心系统的功能要求,运行稳定可靠。
旋转式井壁取心系统;控制软件;深度定位;驱动模式
0 引 言
旋转式井壁取心技术是一种新型的取心技术,施工简便、成本低,它与撞击式取心技术相比有获取的岩心颗粒大(直径为25 mm,心长最大50 mm)、岩心完整不变形、取心深度准确等优点,保证了岩石样品的孔隙结构不被破坏,使利用核磁共振对这类样品岩石物性的测试成为可能。可直接选样分析化验获取储层的岩性、物性、含油性等参数,在很大程度上可满足地质分析对实物样品的需求。与普通钻井取心相比,取心的层位更具有针对性,适合对全井段取心。旋转式井壁取心地面软件作为直接面向对象的上层控制平台,基于Window sXP环境,采用模块化结构程序设计思想,具有友好的人机界面,操作简洁、方便,能够实时、高效地处理上传数据,大幅度提升系统效率,从而准确地完成取心任务[1-2]。
1 旋转式井壁取心系统概述
旋转式井壁取心仪是在地面系统的控制下,跟踪测量自然伽马或0.4 m电极进行校深。然后根据油田勘探开发的要求,在目的层位停车,控制井下仪器依次完成推靠、马达旋转、钻头钻进、折断岩心、钻头收回、停止旋转、收推靠臂、收储岩心等一系列取心动作,从而完成取心任务。旋转式井壁取心系统主要由地面控制系统和井下仪组成。马龙头、井下电子线路、平衡节装置、液压节装置和机械执行装置共同组成井下仪井壁取心系统。
计算机系统通过局域网与控制面板连接,控制面板有自动和手动操作切换功能,采用自动方式时由安装在计算机上的取心软件将用户命令通过以太网发送给控制面板,再由控制面板通过载波通讯传送给井下仪,从而实现对井下仪的控制,完成取心过程;采用手动方式时,对井下仪的操作通过控制面板上的按钮来实现。马丁代克产生的深度、张力信号以及井下仪上传的各种信号通过控制面板发送给地面取心软件,进行实时处理与显示。控制面板与变频电源之间用串口连接,地面软件可以通过控制面板控制变频电源,给井下仪提供所需电压。
2 软件结构设计
2.1 系统模块结构
基于Window sXP环境,利用Visual C++6.0开发了应用软件。为便于系统的实现、维护和扩展,软件整体结构采用模块化设计(见图1)。
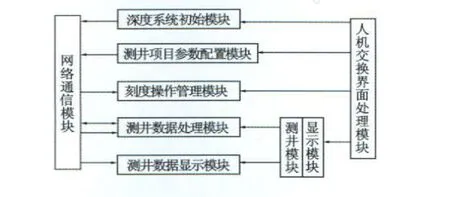
图1 系统模块结构图
人机界面管理模块负责管理用户输入操作,向其他各模块发送消息、指令等,主要有以下几种操作和命令:仪器串组合配置操作、刻度命令、开始测井命令、停止测井命令、回放命令、仪器控制命令等。网络通讯模块通过响应用户消息读取以太网传来的实时帧数据,即响应采集前端的深度和时间中断,更新实时数据缓冲区,产生数据到达事件;还负责将命令缓冲区信息下发到单片机系统。深度初始化模块可根据现场需要调整深度系统的输入、输出设置。测井项目参数配置模块负责加载所需的各个仪器数据信息,建立仪器对象类链表;还完成对图头参数、仪器参数等的配置,各个参数通过数据库管理。刻度操作管理模块负责调用刻度控制文件,并按照文件控制刻度过程,管理刻度资料。测井数据处理模块只有在刻度和测井状态下被调用,它根据定义的仪器组合顺序,调度每个仪器对象的计算函数,应包括计算初始化,数据处理和计算结束函数。测井数据显示模块完成测井或刻度过程中的图形显示。测井模块完成设定测井方式、测井记盘选择等功能,并对测井过程进行实时监控。回放模块将实时记录的文件回放出来。
2.2 取心深度定位
取心的关键在于准确地从目的层取出岩心,因此取心深度的确定是取心施工的核心所在。该软件通过实时跟踪0.4 m电极或伽马曲线确定取心点位置。首先,测取0.4 m电极或伽马曲线与给定的标准曲线校深,将当前深度校好,并且要求其测量段覆盖所有要取心的位置。将测得的曲线作为参考曲线,在参考曲线上标出需要取心的位置,然后再实时测量跟踪参考曲线,调节参考曲线与实时测得曲线重合。当深度到达参考曲线上标好的取心点位置时停车,就可以准确地定位取心点。
2.3 深度驱动与时间驱动交替运行的实现
由于旋转式井壁取心仪的取心是通过液压驱动马达带动钻头来进行的,在取心过程中很容易憋钻,损坏电机,这就要求实时监测大泵、小泵的压力,当泵压过高将要憋钻时,进行退钻来降低压力,保护电机。通过时间驱动将实时记录的大、小泵压力以及岩心长度、钻头位移等各种参数,以曲线形式显示出来,可以很直观地看到各个参数的变化,从而准确判断仪器的工作状态;同时将记录的各个参数重新回放,还可再现取心过程,从而对在取心过程中遇到的各种问题进行详细分析,对仪器的故障进行准确判断,便于仪器的维护和维修。当实时跟踪伽马或0.4 m电极曲线进行取心点深度定位时,采用深度驱动显示和记录测井信息,因此在整个取心过程中,深度驱动与时间驱动交替运行。
该软件支持上提取心和下放取心,以上提取心为例。首先,上提仪器深度驱动测井,实时测取伽马或0.4 m电极曲线与参考曲线进行比对,调节参考曲线与实时跟踪曲线重合,然后开始记录。这时软件会根据实时深度与设定的第1个取心点的位置进行倒计数,当倒计数变为0时,同时也会看到参考曲线上标出的第1个取心点的位置,这时停车取心,软件转入时间驱动模式,记录各个参数。当取心动作完成后,软件结束时间驱动模式,再次转入深度驱动模式,接着上次采用深度驱动方式记录的文件继续记录,直到到达下1个取心点,再次进入时间驱动模式,如此反复,直到最后取完所有设定的岩心。
2.4 网络通讯模块的实现
井下仪通过载波通讯将采集的各种信号传送给控制面板,地面软件与控制面板之间通过局域网来通讯,采用TCP/IP模式,地面软件为客户端,控制面板为服务器[3]。
网络程序采用 Window s Socket方式。Socket是连接应用程序与网络驱动程序的桥梁,Socket在应用程序中创建,通过绑定操作与驱动程序建立关系。此后,应用程序送给Socket的数据,由Socket交给驱动程序向网络上发送出去。计算机从网络上收到与该Socket绑定的IP地址和端口号相关的数据后,由驱动程序交给Socket,应用程序便可以从该Socket中提取接收到的数据,网络应用程序就是这样通过Socket进行数据的发送与接收的。基于TCP的Socket编程的客户端流程如下
(1)建立客户端的套接字(Socket);
(2)向服务器发出连接申请(connect);
(3)和服务器端进行通信(send/recv);
(4)关闭套接字(closesocket)。
2.5 双缓冲绘图
测井时需滚屏显示测井曲线,运算量大,如按常规滚屏的方法直接在应用程序的窗口绘制全图,由于开始绘制曲线像素所需的大量图元计算时间和结束像素绘制时间之间有延迟,经常会出现图像的刷新速度慢、图像重叠和闪烁、花屏等现象。应用双缓冲技术,首先在内存中绘制测井曲线,在滚屏显示过程中将内存中相应位块的图像剪贴到显示区域,连续地显示曲线,进而将内存中的设备相关图像转换成设备无关的、标准格式的图像进行保存[4]。双缓冲实现过程
(1)在内存中创建与画布一致的缓冲区
(2)在缓冲区画图
(3)将缓冲区位图拷贝到当前画布上


(4)释放内存缓冲区

3 应用实例
2009年7月,采用旋转式井壁取心在任××井试验取心,取得成功。图2为任××井取心曲线,在取心过程中采用伽马定位取心。首先用伽马曲线进行校深,然后将校深好的伽马曲线作为参考曲线,在取心过程中进行实时比对,从而准确地在取心点停车取心。

图2 任××井取心曲线
4 结 论
旋转式井壁取心软件通过实时跟踪0.4 m电极或伽马曲线确定取心点位置,准确地在目的层停车取心,同时在取心位置打出标志,可以很直观地看出取心施工点是否在设定的目的层。实际应用表明,该软件的准确性和实时性达到了旋转式井壁取心系统的功能要求,运行稳定可靠。
[1] 史倬晖.旋转式井壁取心器的应用[J].测井技术, 1992,16(5):387-390.
[2] 王美珍.旋转式井壁取心技术在油藏评价中的应用[J].大庆石油地质与开发,2009,28(4):42-45.
[3] 孙 鑫,余安萍.VC++深入详解[M].北京:电子工业出版社,2006:523-556.
[4] 郭希明,黄旭望.利用双缓冲技术实现巨幅测井曲线的显示与保存[J].重庆石油高等专科学校学报, 2003,8(1):54-56.
Control Software Design for Rotary Sidewall Coring Tool
YANG Liang1,WANG Yian1,WANG Guoping2,HUANGM ingyan1,YAN Lei1
(1.Huabei Division,China Petroleum Logging CO.L TD.,Renqiu,Hebei 062552,China; 2.Technology Center,China Petroleum Logging CO.L TD.,Xi’an,Shaanxi 710077,China)
Introduced are the system composition and working p rincip le of rotary sidewall coring tool.Designed is a kind of surface controlling softw are fo r the rotary sidew all co ring tool,w hich can track GR or 0.4 m electrode in real time,locate core points accurately,and record pump p ressure and other parameters during co ring operation through time-driven app roach.A nalyzed are the realization of key technologies,such as co ring dep th location,alternative operation of dep th drive and time drive,netwo rk communication and double buffering cartography.Practical app lication in Ren91 w ell in 2009 show s that its accuracy and instantaneity reach up to the designed demand and its operation is stable and reliable.
rotary sidewall coring tool,control software,dep th localization,driver model
1004-1338(2010)05-0476-03
P631.81; TP31
A
杨 亮,男,1982年生,从事测井仪器研发工作。
2010-06-12 本文编辑 王小宁)
猜你喜欢
科学家(2022年3期)2022-04-11
选煤技术(2021年3期)2021-10-13
石油管材与仪器(2021年1期)2021-04-13
数学学习与研究(2019年12期)2019-08-07
电脑爱好者(2018年18期)2018-11-05
家庭影院技术(2018年8期)2018-08-21
电脑爱好者(2017年9期)2017-06-01
中国医学装备(2016年6期)2016-12-01
工业设计(2016年11期)2016-04-16
中国教育技术装备(2015年21期)2015-03-11
