浅谈计算机视觉与数字摄影测量
2010-11-27 06:56:12文静华
地理空间信息 2010年2期
张 梅,文静华
(1.贵州财经学院数学与统计学院,贵州贵阳 550004; 2.武汉大学 遥感信息工程学院,湖北武汉 430079)
浅谈计算机视觉与数字摄影测量
张 梅1,2,文静华1
(1.贵州财经学院数学与统计学院,贵州贵阳 550004; 2.武汉大学 遥感信息工程学院,湖北武汉 430079)
计算机视觉技术集数字图像处理、应用数学、模式识别及人工智能等知识于一体,其应用已经涉及到计算机图形学、图像处理与分析、机器人学等领域。数字摄影测量技术是测绘学科的一个分支,数字摄影测量已经进入计算机视觉的领域。文中简要地回顾了计算机视觉技术的发展史,主要介绍了计算机视觉与数字摄影测量的共同点及其本质差异。
计算机视觉;数字摄影测量;本质差异;共同点

计算机视觉的研究目标是使计算机具有通过二维图像认知三维环境信息的能力,这种能力将不仅使机器感知三维环境中物体的几何信息,包括其形状、位置、姿态、运动等,而且能对它们进行描述、存储、识别与理解[1]。数字摄影测量是测绘学科的一个分支,它是对由摄影机摄取的影像(二维)进行量测,测定物体在三维空间的位置、形状、大小乃至物体的运动[2]。就计算机视觉 (特别是计算机立体视觉)的研究内容而言,它与数字摄影测量十分相近,然而两者有存在本质差异,本文主要阐述计算机视觉与数字摄影测量的关系。
1 计算机视觉的发展史
计算机视觉是在20世纪60年代从统计模式识别开始的,当时的工作主要集中在二维图像分析和识别上,如光学字符识别、工件表面、显微图片和航空图片的分析和解释等[3]。60年代Roberts通过计算机程序从数字图像中提取出诸如立方体、楔形体、棱柱体等多面体的三维结构,并对物体形状及物体的空间关系进行描述。到了70年代,已经出现了一些视觉应用系统。70年代中期,麻省理工学院(M IT)人工智能(AI)实验室正式开设“机器视觉”(Machine Vision)课程,由国际著名学者B.K.P.Horn教授讲授[4]。80年代以来,计算机视觉的研究已经历了从实验室走向实际应用的发展阶段,而计算机工业水平的飞速提高以及人工智能、并行处理和神经元网络等学科的发展,更促进了计算机视觉系统的实用化和涉足许多复杂视觉过程的研究。目前,计算机视觉技术正在广泛地应用于计算几何、计算机图形学、图像处理、机器人学等多个领域中[5]。
计算机视觉是人工智能领域的一个重要部分,它的研究目标是使计算机具有通过二维图像认知三维环境信息的能力。计算机视觉是以图像处理技术、信号处理技术、概率统计分析、计算几何、神经网络、机器学习理论和计算机信息处理技术等为基础,通过计算机分析与处理视觉信息[6]。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取信息的人工系统。计算机视觉的研究就是模拟人类视觉功能的科学技术研究,是实现工业生产自动化、机器人智能化、自主车导航、目标跟踪,以及各种工业检测、医疗和军事应用的核心内容之一,也是实现智能机器人的关键因素之一[7]。计算机视觉是一门综合性的学科,它已经吸引了来自各个学科的研究者参加到对它的研究之中,其中包括计算机科学和工程、信号处理、物理学、应用数学和统计学、神经生理学和认知科学等。计算机视觉也是当前计算机科学中的一个非常活跃的领域,计算机视觉领域与图像处理、模式识别、投影几何、统计推断、统计学习等学科密切相关。近年来,与计算机图形学、三维表现、数字摄影测量等学科也发生了很强的联系。
2 计算机视觉与数字摄影测量的区别
1)两者发展的历史、目的不同。世界上第一台电子数字计算机(ENIAC)在美国诞生后,计算机立体视觉的开创性工作是从20世纪60年代中期开始的。美国M IT的Robert完成的三维景物分析工作,把过去的二维图像分析推广到三维景物,这标志着立体视觉技术的诞生。1851~1859年,法国陆军上校劳赛达特提出的交会摄影测量被称为摄影测量学的真正起点[8]。摄影测量的发展远早于计算机与计算机立体视觉。在电子数字计算机出现之前,摄影测量已经是测绘产业的一个重要组成部分。摄影测量始终是测绘学科的一个分支,通过摄影方式进行测绘,特别是测绘地形图。因此,计算机视觉与摄影测量的目的有很大的差异。
2)出发点不同导致基本参数物理意义不同。计算机视觉是研究怎样用计算机模拟人的眼睛,实现机器人的视觉,它是以眼睛(摄影机)中心与光轴构成的坐标系为准,它定义的平移量是空间坐标系相对于摄影机坐标系的平移量。而摄影测量是测绘地形图的重要生产手段,它以空间 (地面)统一坐标系 为基准,如在一个地区进行航空摄影测量,所有摄影机的空间位置与影像的坐标都相对于该空间坐标系。因此,在摄影测量中的“外定向”是确定影像在空间相对于物体的位置与方位;而计算机视觉通常从另一个方向描述这个问题:搜索物体相对于影像的位置与方位。
3)出发点不同导致基本公式的不同。由于物体与影像基本关系之间的差异,从而引起计算机视觉与摄影测量之间的基本公式的差异。计算机视觉与摄影测量都是研究物体与影像关系的,因此,描述三维物体与二维影像坐标之间的关系公式是它们的基本公式。计算机视觉最基本的公式用齐次坐标的投影方程表达为[1]:

式中,M为3×4阶的投影矩阵,它将摄影机的内、外方位元素全部隐含在其中,它与摄影测量的直接线性变换公式一致。一般摄影测量多使用量测相机 (即预先对相机标定),因而测定每张影像的6个外方位元素是摄影测量的主要任务。而在计算机视觉的许多应用场合中,求得M矩阵后,不必再分解相机的内外方位元素,直接将M矩阵作为摄像机参数,但是它们没有具体的物理意义。
描述影像坐标与物方坐标的摄影测量基本关系式为[]:

由此可得到摄影测量中最基本的共线方程:

它将摄影机的内、外方位元素全部分开表达。
4)处理的对象不同,处理流程也不同。航空摄影测量需要对一个区域测绘地形图,因此影像按航线的条带排列,影像在航带内具有 60%的重叠,而在航线间具有 20%的重叠。因此,航带内相邻影像的相对定向 (构成一个立体模型)、模型间的连接 (构成一条航线的立体模型)、航线间的连接 (构成区域)、空中三角测量、区域网平差,从而确定每张影像的外方位元素,是摄影测量最重要的流程之一。但是计算机视觉处理的范围一般较小,通常为一个立体像对 (立体视觉),上述的很多处理方法 (如空中三角测量和区域网平差)在计算机视觉中并不需要。
5)研究方法的不同 。计算机视觉通常采用矩阵分解[10],确定线性方程直接解,计算机视觉总是设法将非线性问题转化为线性问题,尽可能避免求解非线性方程。最小二乘法在计算机视觉上也有应用,但是它不是主要方法。
测绘学科对观测值处理的方法是测量平差,其数学基础是最小二乘法。摄影测量也不例外,由观测值解求未知数,多是采用测量平差方法。为此,摄影测量所要解决的问题是确定函数模型、平差模型、未知数初值的确定、解的稳定性、观测值中粗差的剔除、精度与可靠性的评定。这基本上是测绘学科数据处理的一个统一流程(见图1)。
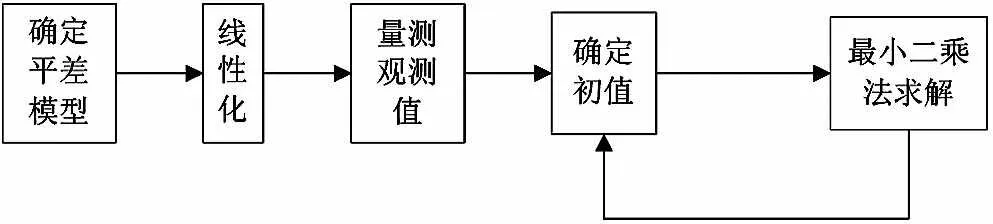
图1 数字摄影测量数据处理流程
可见,对同一问题两者解决的方法是不同的。特别是在数字摄影测量中引入最小二乘匹配之后,它使最小二乘法同样也贯穿于数字摄影测量的全过程。计算机立体视觉与数字摄影测量的根本问题之一是利用计算机代替人眼识别影像同名点。最小二乘法已经贯穿了数字摄影测量的全过程。两者的研究方法、思考问题的习惯都有明显的差异。
3 计算机视觉与数字摄影测量的联系
就计算机视觉(特别是计算机立体视觉)的研究内容而言,它与摄影测量十分相近。计算机视觉的研究目标是使计算机具有通过二维图像认知三维环境信息的能力,这种能力将不仅使机器感知三维环境中物体的几何信息,包括其形状、位置、姿态、运动等,而且能对它们进行描述、存储、识别与理解[1]。双目立体视觉是计算机视觉的一个重要分支,是研究如何利用二维投影图像恢复三维景物世界,即由不同位置的两台或者一台摄像机(CCD)经过移动或旋转拍摄同一幅场景,通过计算空间点在两幅图像中的视差,获得该点的三维坐标值。美国麻省理工学院人工智能实验室的Marr提出了一种视觉计算理论并应用了双目匹配上,使两张有视差的平面图产生了深度的立体图形,奠定了双目立体视觉发展理论基础。双目视觉直接模拟人类双眼处理景物的方式,可靠简便,在许多领域均极具应用价值,如机器人导航、三维测量以及虚拟现实等。摄影测量是一门从物体二维影像重建三维空间物体的学科。显然,摄影测量与计算机视觉具有同样的目标,数字摄影测量的发展已经借鉴了许多计算机视觉的研究成果。摄影测量进入数字摄影测量以来,它已与计算机视觉紧密地连接在一起。两者的学科内容相似,如计算机视觉研究特征匹配与影像配准,而摄影测量讨论影像相关与影像拼接。
计算机界也在利用立体视觉的原理进行从影像测绘地形图的研究。最近,人们利用立体视觉的原理,正在探索综合运用同一地区的多张不同角度拍摄所得的照片来恢复出地面的高度信息,以获得真正的三维地形图,并已取得了相当的进展。在一个立体像对内进行量测的过程中,两者也基本相似。一个完整的立体视觉系统通常可分为图像获取、摄像机定标、特征提取、立体匹配、深度确定及内插等6个部分。
为了降低双目匹配的难度,计算机界很早就开始研究三目立体视觉系统、三目机器人视觉系统、多目立体匹配。为解决周期性重复特征所引起的误匹配,计算机界提出了对倒距离的求和SSD(sum of square difference)。多目视觉对于现在的航空数码相机显得尤为重要,“多目立体匹配”可以利用摄影测量的空中三角测量原理,对多度重叠点进行“多方向的前方交会”,既能较有效地解决随机的误匹配问题,同时又能增加交会角,提高高程测量的精度。在计算机视觉测量当中,同名点的自动匹配是实现测量自动化的必要环节。通常,目标的自动识别与匹配在计算机视觉测量当中主要通过计算机模式识别等来实现[11]。多基线立体对于数字近景摄影测量同样至关重要,它的重叠度可以完全由摄影者控制。多基线立体的出现将有力地解决双目立体匹配的歧义性,并完全有别于传统的摄影测量与传统的近景摄影测量。
计算机视觉界认为从二维影像中恢复三维运动和形状,是计算机视觉的主要目标,并出现了多种方法。这个问题可以分解为两部分:一个是对应性问题;另一个是给定对应时运动和形状的计算算法的问题。数字摄影测量在本质上与计算机视觉一样,也是由两部分组成:1)在不同影像上量测的应该是同名点 (同名特征)--对应性问题。传统摄影测量都是由作业员的“双目”通过“双目望远镜系统”决定的,它没有成为摄影测量的研究内容。但进入数字摄影测量以后,“对应性”问题始终是摄影测量关注的焦点。2)影像与影像、影像与空间的解析关系,它始终被视为摄影测量的基本任务。
数字摄影测量已经进入计算机视觉的领域,数字摄影测量的进一步发展必须破除传统摄影测量的束缚,从计算机视觉的观点出发。同时,尽管数字摄影测量与计算机视觉有差异,但是随着测量 (特别是高精度测量)型的计算机视觉的需求以及数字近景摄影测量的发展,两者的学科交叉必将愈来愈重要,这种交叉将会在计算机视觉中形成一个新的分支----摄影测量的计算机视觉。随着对定量研究的重视,新的描述方式、求解手段的研究,以及感知手段的改进,计算机视觉与数字摄影测量的研究必将迎来一个更加繁荣、智能的时代。
[1] 马颂德,张正友.计算理论与算法基础[M].北京:科学出版社, 2003
[2] 李德仁.摄影测量与遥感学的发展展望[J].武汉大学学报:信息科学版,2008,33(12):1 211-1 215
[3] 陈丹.计算机视觉技术的发展及应用[J].电脑知识与技术, 2008,4(8):2 449-2 452
[4] 马玉真,陶立英,王新华.计算机视觉技术的应用[J].试验技术与试验机,2006,1(3):60-65
[5] 王斌,王知衍.计算机视觉中的三维重构建模[J].微计算机信息,2005,21(12):118-120
[6] 王保丰,范生宏,黄桂平,等.计算机视觉中基于多照片的同名点自动匹配[J].测绘科学技术学报,2006,23(6):451-453
[7] 王芳荣,赵丁选,尚涛,等.应用计算机视觉技术进行物体三维重构[J].吉林大学学报:工学版,2008,38(6):1 424-1 428
[8] 万幼川,张永军.摄影测量与遥感学科发展现状与趋势[J].工程勘察,2009,6:6-12
[9] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,2000
[10]Forsyth D A,Ponce J著,林学,王宏等译.计算机视觉:一种现代方法[M].北京:电子工业出版社,2004
[11]张宏林.Visual C++数字图像模式识别技术及工程实践[M].北京:人民邮电出版社,2003
Simp le Discussion on Computer Vision and Digital Photography
ZHANG Mei1,2,WEN Jinghua1
(1.School of Mathematics and Statistics,Guizhou Financial Institute,Guiyang 550004,China; 2.School of Remote Sensing and Information Engineering,Wuhan University,Wuhan 430079,China)
The computer vision technology gathered the know ledge such as digital image processing,application mathematics,mode recognition and artificial intelligence into a whole, and its application has already come down to these fieldof computer graphics,image processing and analysis,robots and soon.The digital photography technology was a embranchment of mapping subject, and its researched content has entered into the field of computer vision.First the developing history of computer vision was reviewed briefly,then the common ground and essential difference of computer vision and digital photography were mainly described.
computer vision;digital photography;essential difference;common ground
2009-10-12
项目来源:国家自然科学基金资助项目 (40671157);贵州省科技厅科学技术基金资助项目 (2009GZ21397)。
P223
B
1672-4623(2010)02-0015-03
张梅,副教授,博士,主要从事计算机视觉、激光扫描数据处理与数字摄影测量等方面研究。
猜你喜欢
小学科学(学生版)(2021年7期)2021-07-28 06:44:42
小哥白尼(趣味科学)(2020年3期)2020-07-27 01:44:42
科技传播(2019年22期)2020-01-14 03:06:34
军营文化天地(2018年2期)2018-04-20 07:08:03
消费导刊(2017年20期)2018-01-03 06:26:40
创新作文(小学版)(2016年10期)2016-11-11 05:45:17
衡阳师范学院学报(2015年3期)2015-02-10 06:02:23
旅游纵览(2014年8期)2014-09-10 07:22:44
焦点(2014年3期)2014-03-11 23:03:43
解放军生活(2009年10期)2009-11-16 09:19:20