机载POS的航空影像自动校正的方法与实现
2010-11-27 06:56:26葛慧斌魏峰远陈兴峰顾行发张金金
地理空间信息 2010年2期
葛慧斌,魏峰远,陈兴峰,余 涛,顾行发,张金金
(1.河南理工大学测绘与国土信息工程学院,河南焦作454003;
2.中国科学院遥感应用研究所遥感科学国家重点实验室,北京100101;
3.国家航天局航天遥感论证中心,北京100101)
机载POS的航空影像自动校正的方法与实现
葛慧斌1,魏峰远1,陈兴峰2,3,余 涛2,3,顾行发2,3,张金金1
(1.河南理工大学测绘与国土信息工程学院,河南焦作454003;
2.中国科学院遥感应用研究所遥感科学国家重点实验室,北京100101;
3.国家航天局航天遥感论证中心,北京100101)
针对每次航空摄影有大批量的影像需要进行几何校正处理,分析了正射纠正算法的全过程,提出利用索引矩阵来进行图像整体运算,利用航空相机的内方位元素和POS系统所提供的外方位元素,用IDL编程开发了航空影像的全自动批处理正射校正的软件,并对其处理结果与ERDAS 9.1的LPS所做出来的正射影像图进行比较。
正射影像;内方位元素;外方位元素;共线方程;旋转矩阵

传统的正射影像图的制作是比较繁琐的,航空摄影所获取的数据仅仅只有图像数据,而缺少定位数据,所附带的文件中包含大量的当地测绘部门提供的控制点的刺点图以及文字说明,在对影像几何校正时,需要人工将控制点刺点从而完成正射影像图的制作,此方法效率比较低,尤其是要处理大量的影像,浪费了很多的人力,物力和财力[1]。
随着空间定位技术和惯性导航技术的不断提高,新的发展也对航空摄影测量提出了新的要求,基于POS系统的航空摄影技术已趋向于成熟,典型的代表就是DGPS(Difference Global Positioning System)差分全球定位系统与IMU(InertialMeasureUnit)高精度惯性测量系统等技术被广泛的应用,使得准确地获取航摄仪器曝光时刻的外方位元素成为可能,实现无(或少)地面控制点,甚至无需空中三角测量工序,即可直接定向测图,从而大大缩短作业周期、提高生产效率、降低成本[2]。
本文利用对航空相机的内方位元素(主距以及像主点坐标)和POS系统所提供的外方位元素(与飞行时间相对应的飞机飞行姿态以及地理坐标数据),利用IDL编程实现了航空影像的全自动批处理正射校正的软件,并对其处理结果与ERDAS 9.1的LPS所做出来的正射影像图进行比较,然后对误差进行分析。
1 数字正射影像的基本原理和P O S数据的获取
1.1 数字正射影像的定义
航空影像在成像的过程中,受到透视投影、摄影轴倾斜、大气折光、地球曲率及地形起伏等诸多因素的影响,致使影像中各像点产生不同程度的几何变形而失真。正射校正图像不仅消除了成像过程中的各种因素导致的影像畸变,而且包含了比线化图更丰富和更直观生动的信息。因此,正射影像的制作已经成为各种遥感应用过程中必不可少的基础工作[3]。
1.2 外方位元素的获取
精确获得影像的外方位元素是摄影测量学的重要研究内容,长期以来一直由繁琐的空中三角测量来完成这项工作,由于其对地面控制点的依赖性,导致在一些控制资料匮乏的地区(如:沙漠、海洋)难以实现航空影像的纠正处理。
IMU和DGPS系统的集成(即POS系统),构成了传感器位置和姿态的自动测量装置,无需地面控制或使用少量控制点就可以使影像达到较高的定位精度,这项技术也称之为“直接地理定位”或“集成传感器定向”[3]。
POS系统所提供的包括时间序列、飞机在拍照时中心点的东坐标和北坐标 (Xs、Ys)、航高 (Zs)、经纬度(lon、lat)、飞机姿态参数 (,,)等外方位数据。飞机在进行数据采集时,飞行姿态和飞机中心位置是不停变化的,这些数据可以实时地对航片进行定位。
2 航空影像的正射纠正过程
2.1 航空影像正射纠正的算法流程
采油污水在MVC/MVR设备中,首先蒸发成为低压的水蒸气,随后经过再压缩后成为高压的水蒸气,而该高压水蒸气在蒸发器中与污水换热凝结,并使得污水蒸发成低压水蒸气。因此在已建MVC/MVR进行污水处理的油田联合站内,可以考虑利用AHT辅助其进行污水处理。如图6所示,与采油污水处理方案类似,利用AHT处理一部分采油污水产生水蒸气,但水蒸气不是直接冷凝而是将这部分水蒸气引入MVC/MVR与前述低压水蒸气混合后一同被压缩。该方案与采油污水处理方案相比减少了对水蒸气的冷却系统,但需要对已建MVC/MVR系统进行调试以适应与AHT结合后的新工况。
基于POS系统的航空影像几何纠正的设计,主要包括以下几步:
1)利用 POS提供的三个飞行姿态角度解算出旋转矩阵;
2)构建正射后影像的四个角点坐标,即正射影像的框架;
3)利用共线方程解算出正射后影像和原始影像的映射关系;
4)对共线方程解算出的像平面坐标加入适当的畸变模型;
5)像平面坐标到图像下标的转换;
6)根据相机内方位元素提供的两种畸变系数解算出影像的畸变值;
7)通过灰度插值得到纠正后的影像。
2.2 正射纠正的详细设计过程
2.2.1 正射影像框架建立
2007—2017年世界纸和纸板出口额排名前5位的国家包括加拿大、芬兰、中国、德国、加蓬、英国、斐济和瑞典,2007年依次为加拿大、芬兰、德国、加蓬和英国,2017年为中国、芬兰、德国、英国和加蓬。各国世界占比除2007年最高者加拿大为10%、最低者英国为5%以及2007年最高者加拿大为9%、最低者斐济为5%外,其余年份均差别不大,前5位国家均在5%~8%区间。
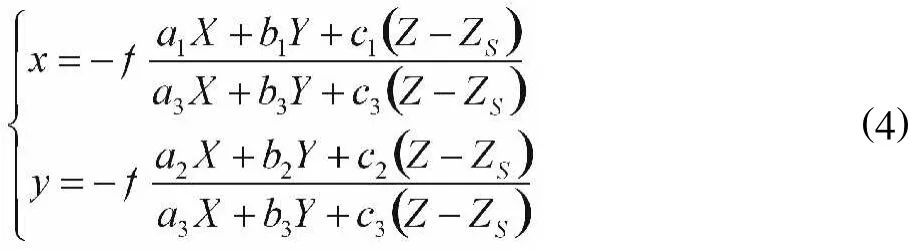
2.2.2 共线方程
根据CCD相机几何标定实验所得到的内方位元素(主距f,像主点坐标x0、y0)确定四个角点在原始影像的像平面坐标,以像主点为坐标原点。
四个角点A,B,C,D(A为左上点,顺序为顺时针)。
A的坐标为(W/2 x0,H/2 y0);
利用公式1计算出原始影像四个角点对应的校正后的四个角点的相对地理坐标,由于没有加外方位元素中的Xs和Ys(中心点空间坐标),因此是相对的坐标。
C的坐标为 (W/2 x0, H/2 y0);
D的坐标为(W/2 x0, H/2 y0)
2.2.10 止血方法 小的肿瘤可在切除后进行止血。大的肿瘤或表面松脆的乳头状瘤有时电凝止血比较困难,可通过调节灌洗液的流量与电切镜的位置,在直视下止血,或尽快将肿瘤切至基底部再止血。对于多发肿瘤,切除一处后应彻底止血,再切另一处。肿瘤切缘及肿瘤基底创面组织均需要仔细全面止血。在切割完成并回收标本后,应重新检查电切创面并充分止血。注意排空膀胱,低压下镜检,确保膀胱内无出血点。
其中,W为原始影像的列数,H为原始影像的行数。
B的坐标为 (W/2 x0,H/2 y0);
当今本科学前教育学生具有思维比较敏捷,对于新鲜事物有着强烈好奇心,积极向上充满活力等特点。而中国高校本科学前教育专业对于理论的培养多于实践技能的培养,对于书本知识“输入式”培养多于“输出式”培养。主要表现在以下两点:

从前期各地的实践看,对PPP项目流程执行各不相同,存在许多不按照规范要求执行的情况。自2017年以来,相关部门相继出台各项政策,对PPP项目进一步规范,5大环节、19个节点仍为判断PPP项目是否合规的重要依据。
根据求得的四个角点相对坐标和分辨率即可定出正射影像的框架来,用四个角点中最大的X坐标减去最小的X坐标再除以分辨率即为正射影像的列数,同理也可以得出正射影像的行数。

校正后的影像框架图如图1所示,O-uv为图像坐标系,O1xy为像平面坐标系。
其中,Zs为摄影中心在地辅坐标系下的空间坐标,Z为物方在地辅坐标下的空间坐标,单位:m;a1、a2、a3、b1、b2、b3、c1、c2、c3为旋转矩阵中的元素;f为相机的主距,单位:像素;求得的X和Y即为校正后影像的四个角点的相对大地坐标,单位:m。
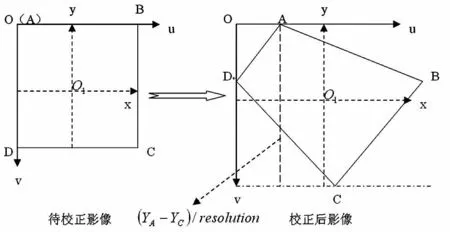
图1 校正后影像框架图
建立Col列Row行的矩阵,即为正射后影像的框架,然后就可以计算框架内每个点的相对地理坐标。
共享经济助推农业供给侧结构性改革——以共享农场为例 ………………………………………………………… 郑涵茜(4/07)
根据反复实验得知,当畸变模型只考虑径向畸变的第一项和偏心畸变的第一项时,图像校正的效果最好,畸变模型为:

图2 经度方向索引矩阵(左)、纬度方向索引矩阵(右)
这两个索引矩阵在小面积不考虑投影的时候使用,同时也构成了一个以左上点为原点的坐标系。纠正后影像的每个点的相对大地坐标由公式(3)计算:

其中,Xmin代表四个角点中最小的X坐标值,Ymax代表四个角点中最大的Y坐标值,lonarr为建立的经度方向的索引矩阵,latarr为建立的纬度方向的索引矩阵,resolution代表分辨率。
先假设一个空的矩阵块为校正后的影像框架。现在需要计算原始影像的四个角点映射到校正影像后的地理坐标。
利用共线方程公式(4)可以解算出正射后的影像的每一个点的空间坐标所对应源图像上的每一个点像元坐标的映射关系。
其中,Xs、Ys、Zs为POS数据中的东坐标、北坐标和航高。X、Y代表正射后影像的相对地理坐标,Z值为平均航高。
一切仿佛是昨天,记忆是流淌的河,深入藏地,遇见他们让我感到无比幸福,那些鲜活的面孔伴随着朴素的名字,宛如河底多彩的石,闪动着美妙的色彩,萦绕在温暖的思绪里。至今我常去甘南草原看看,想念他们成了惯性,每画,总沉迷。
因此可以将公式(3)计算出的结果直接代入公式(4)即可,由于飞行地点在日照,海拔接近于0,因此没有引入DEM,Z值近似地认为为零值,x,y即为正射影像中每个点对应于源图像的像平面坐标。
2.2.3 像平面坐标的畸变校正
上一步的共线方程之所以没有加入畸变,其原因是没有相应的像平面坐标参与计算,因此,上一步得出的像平面坐标其实是带有畸变的像平面坐标,即:
赵山渡引水渠系工程自2001年6月投入试运行以来,已运行达17年,运行期间,2005年12月进行了一次停水大检修,2010年6月渠系南干渠进行了一次停水检修[3]。为保证渡槽安全运行,采用碳纤维贴片方式,进行了整体防渗补强加固施工。

用IDL进行整体运算要建立索引矩阵,建立的矩阵以左上点为原点。假设要建立一个 100*100的经纬度方向的索引矩阵,如图2所示。
对于适合学生实际动手操作的实验,教师可以通过演示实验来让学生明确实验的步骤,避免学生在进行实际操作时产生问题,对于不适合学生进行操作的实验,教师可通过演示实验来增进学生的理解.虽然学生没有必要进行实际操作,但实验原理、实验内容是学生必须要掌握的.演示实验在高中物理教学中具有一定的优势,教师合理教学设计,将操作与讲解相结合,发挥演示实验的作用,并且通过操作的规范性提升让学生对知识的掌握更加精准.

2.2.4 像平面坐标转换到图像下标
通过以上文献分析,笔者认为,在兰克韦尔德(Lankveld,2016)等人得出的教师个体的增值感、与其他教师的关联感、自我胜任感、对教育的承诺感和对未来职业道路的想象这五个教师专业身份发展过程中,教师个体的增值感、胜任感和与其他教师的关联感,可归于教师自我效能与教师工作满意度的范畴,而教师的承诺感和对未来职业道路的想象,可归于教师教学动机和教师职业承诺的范畴,因而,本文认为,教师的教学动机、自我效能、工作满意度和职业承诺是教师专业身份发展的重要环节,也是判定教师专业身份形成的指标,四者之间相互关联相互影响。
由共线方程计算出来的坐标仅仅是以像主点坐标为原点的坐标系下的坐标,不能直接进行灰度插值,需要转换为图像的下标才能被计算机所认可和识别。
假设源图像的宽和高为W和H,则由像平面坐标x'和y'转换为图像坐标系的u和v是一个很简单的过程,需要注意的就是两个坐标系的方向性不一的问题。
像平面坐标系转换为图像坐标系的公式为:

到此为止,便解算出了正射后影像的每个像元的地辅空间坐标系和正射前的图像坐标系之间的一一对应关系。
由于正射校正过程在于纠正图像的畸变问题,因此,校正后的图像的每个像元不可能和待校正图像的像元完全一样。通常校正影像的第一步就是要根据已知条件去构建出校正后影像的框架,即影像的列数、行数以及每个点的所对应的空间坐标。
2.2.5 灰度插值
有了正射图像每个点对应的源图像的下标,即可以进行灰度插值,灰度插值就是把对应的源图像上的灰度值赋值给正射后的影像,灰度插值的方法有很多种,有最临近插值,双线性插值,三次立方卷积插值。[5]综合精度和运行速度要求,选择双线性内插方法。
上述步骤所求得的对应的下标值有两种情况:一种是整数,另一种是小数,一般情况下都是小数。如果是整数,就直接将源图像上的灰度值赋给目标正射图像;如果是小数,则先向下取整,例如下标值为123.5,则向下取整为123,再取相邻的另外3个点:右点,上点,右上点。周围 4个点 (i,j)、(i+1,j)、(i, j+1)、(i+1,j+1)的灰度值分别用 p1,p2,p3,p4表示,x的下标值差用dx表示,dx等于x下标小数减去取整后的整数,例如123.5减去123,dx就是0.5,同样,dy代表y的下标值差。

公式(8)根据下标值离周围点的距离远近做加权运算,综合得出的灰度P赋值给正射图像。用IDL数组整体运算,算出正射后影像每个像元所对应的灰度值,填满之前我们建构的正射影像框架,如图3所示,并写入TIF格式的图像。本软件直接读取有POS数据的txt文件,并有时间关联函数同每幅影像一一对应,支持批处理,大大地加快了处理图像的速度。到此就完成了对航空影像的校正过程。

图3 插值示意图
3 验证与结论
实验数据来自中国科学院遥感应用研究所国家航天局航天遥感论证中心于2008年12月19日在山东省日照市进行的航空飞行试验。机载相机为多角度偏振相机,多角度偏振相机 CCD芯片分辨率:1 024×1 024 pixel,共12个通道,通道波段由镜前滤光片控制。
PBL教学模式可以帮助学生将所学英语口语切实应用到实践中去,为学生提供一个更加真实的环境,通过提问,正确引导学生深入思考,让学生反复回忆所学知识,实现问题与知识的有机联系,以此强化学生的思维能力,以及知识应用水平。
本软件实现的功能等同于ERDAS 9.1中的LPS模块,现将本软件做出来的结果同LPS做的结果做一个比对。源图像和LPS做的结果和本软件做的结果如图4、图5、图6所示。

图4 源图像(raw)

图5 LPS制作的正射影像图(IMG)
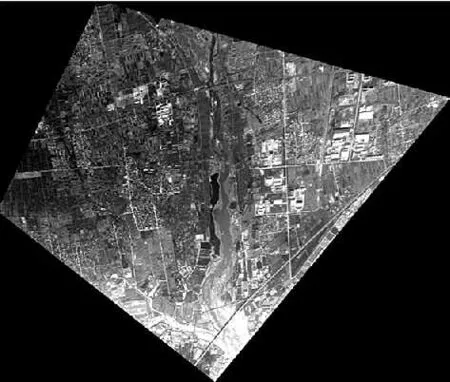
图6 本软件制作的正射影像图(TIF)
为了验证结果的精度,将LPS做出的结果近似地看作一个标准,分别取图5和图6的左、下、右、上、中5对同名点,对其坐标进行比对验证如表1所示。
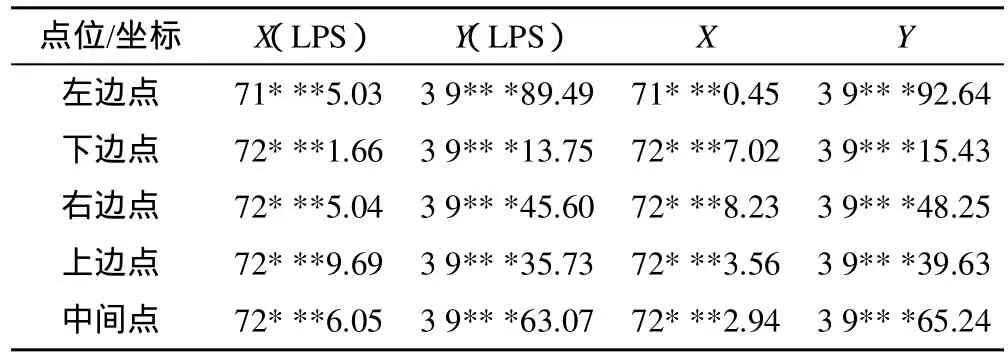
表1 同名点坐标比对
由表1可以看出,LPS制作的结果和本软件制作的结果平均有2-3个像元的误差(图像分辨率为4m)。主要原因有两点:
1)本软件所用图像面积较小,没有考虑地球曲率的影响,即没有考虑投影,由此会带来一些误差;
2)LPS的模块里没有输入相机的畸变系数。
尽管在语言学领域,国家形象的研究已成为学者的研究热点,但是大多仅局限于对某一特定报道或特定演讲的分析,并没有对外媒眼中的中国国家形象进行系统梳理,尽管已有研究探讨了外媒眼中的国家形象如何,但对这些看法背后的深层含义鲜有涉及。本文将从认知的视角,运用概念隐喻理论及架构理论,对2016年经济学人中的涉华报道进行架构隐喻分析,试图回答以下三个问题:(1)经济学人的报道中,涉及的主要中国形象有哪些?(2)在这些中国形象中,涉及到的隐喻架构有哪些?(3)外媒使用这些隐喻架构的深层含义是什么?
由于本软件是针对多角度偏振相机的POS获取的外方位、检校试验得到的内方位、遥感图像等数据的特有格式编写,因此,在处理速度上比LPS有一定的优势,所有参数都存放在txt文档中,直接读入,将图像导入后,一键自动实现多片批处理。而LPS要首先建立一个工程,将每幅图像的参数都输入完毕,才能进行处理。速度快的另外一个原因是IDL所提供的数组整体运算,在对图像进行1 024×1 024个处理中显现出巨大的优势,免去了速度慢的FOR循环操作,大大地提升了处理效率[6]。
不足之处和需要改进的地方有:
1)没有将 DEM 考虑进去,高程都近似地为零,由此会带来一定的不准确和不科学性;
2)几何精度方面需要进一步验证和改进;
竞争中立制度追求的是自由竞争和公平竞争的目标,具体的实施模式在国有企业和私营企业之间通过一系列中立的政策建构竞争环境。而竞争中立最主要针对的对象其实是国有企业。而我国国企的强势地位是建构竞争中立制度的一大难题,虽然我国在确立市场经济体制之初就明确了国有企业要建立现代化治理制度,但我国国企特别是如石油、天然气、电信等公用企业产生的优势地位已极大影响了市场竞争。我国竞争中立制度若想充分实现其自由竞争和公平竞争的目的,就必须克服国有企业的强势、优势地位这一重大障碍。㉖我国改革国企面临着极大压力。改革国企要将其合理地类型化,而非一律进行市场化的转变,同时还需完善预算和资产管理制度。
3)仅靠 POS系统的定姿定位数据对遥感图像进行几何纠正,效果还不够好,还需要进行配准才能达到像元级的精度。
[1] 吴芳,郑雄伟,王建超,等.基于POS系统的1:10 000比例尺正射影像图制作[J].国土资源遥感,2007(4):54-56
[2] 李学友.IMU/DGPS辅助航空摄影测量综述 [J].测绘科学,2005,30(5):110-113
[3] 刘军,张永生,王冬红,等.POS AV510-DG系统外方位元素的计算方法[J].测绘技术装备,2004,6(04):6-9
[4] 张平.数字正射影像的制作技术及问题探讨[J].测绘通报,2003(10):28-30
[5] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002
[6] 闫殿武.IDL可视化工具入门与提高[M].北京:机械工业出版社,2003
Realization of the Automatically Rectifying of Airborne POS-Supported Aviation Image
GE Huibin1,WEI Fengyuan1,CHEN Xingfeng2,3,YU Tao2,3,GU Xingfa2,3,ZHANG Jinjin1
(1.Institute of Surveying and Mapping,Henan Polytechnic University,Jiaozuo 454003,China;2.State Key Laboratory of Remote Sensing Science,Institute of Remote Sensing Applications,CAS, Beijing 100101,China;3.The Center for National Spaceborne Demostration,Beijing 100101,China)
To point againstthere will havea largenumber of imageneed to geometric correction after aerial photography every times,analyzed the entire process of orthoimages correcting algorithm and put forth using index matrix to calculate image as a whole,utilized the inner orientation elements of aerial camera and the exterior orientation elements provided by POS system.Programming w ith IDL to develop a software which can batch rectify the aviation image automatically, and compared the results of the orthophoto made by LPS of ERDAS 9.1 vision.
orthoimage;inner orientation element;exterior orientation element;Collinear equation;Rotate matrix
2009-07-20
项目来源:国防科工委项目,科技三项(KJSX0601);中国科学院知识创新工程重要方向项目 (kzcx2-yw-303)。
P231
B
1672-4623(2010)02-0011-04
葛慧斌,硕士,主要研究方向为数字城市。
猜你喜欢
中国新技术新产品(2024年11期)2024-12-04 00:00:00
人民交通(2022年5期)2022-06-16 07:25:12
测绘工程(2021年5期)2021-09-13 09:01:38
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
遥感信息(2015年3期)2015-12-13 07:26:50
电测与仪表(2015年22期)2015-04-09 11:42:14
铁道科学与工程学报(2014年5期)2014-08-06 06:53:10
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41
癌变·畸变·突变(2014年6期)2014-02-27 06:15:03