空间相机调焦机构的设计与分析
2010-11-06 08:04张新洁王树清颜昌翔
中国光学 2010年5期
张新洁,王树清,颜昌翔
(中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
1 引 言
随着空间技术的快速发展,对空间相机捕获的图像要求越来越高。因发射条件及工作环境的影响,成像系统的焦面常会产生离焦现象,从而要求设计相应的调焦机构来补偿焦面的离焦量。针对空间相机的特殊使用环境,要求调焦机构具有低速平稳、体积小、重量轻、传动精度高等特点,而采用刚性件的传统传动方式已难以满足上述要求[1],因此,寻求一种合理、稳定并具备上述特点的传动方式进行调焦十分必要。
本文介绍了一种由精密步进谐波传动带动的空间相机的调焦机构,详细阐述了谐波传动的结构特性并对其进行了误差分析,最后对调焦组件做了位移精度检测,数据表明其精度满足使用要求。
2 精密步进谐波传动结构设计
谐波传动是随着空间遥感新技术的发展而出现的一种新型传动,它在空间环境下具有其它传动难以达到的特殊性能。
根据空间相机的调焦要求,采用的调焦组件传动结构如图1所示,精密步进谐波传动同相机的调焦镜相连,精密谐波传动中的输出刚轮与滚珠丝杠相连,调焦镜一端与滚珠丝杠的螺母连接,底部与直线导轨滑块连接,从而使步进电机的旋转运动转化为调焦机构的直线运动[2]。

图1 调焦组件传动结构示意图Fig.1 Structure diagram of focusing device
设带动谐波减速器的步进电机的步距角为θ,谐波减速器的传动比为i,滚珠丝杠的导程为h,调焦镜沿滚珠丝杠轴线方向的最小位移为Δl,则它们之间的关系为[3]:

根据空间相机的技术要求,选取步进电机的步距角为θ=0.9°,滚珠丝杠的导程为 12 mm,设步进电机每走一步,调焦机构的位移为 0.45μm,则谐波减速器的传动比为:

为此,选用精密谐波传动装置,传动比为 70。
该传动主要由波发生器、柔轮、刚轮和输出刚轮组成,如图2所示。波发生器由椭圆凸轮与套在其外部的柔性轴承组成,装入柔轮内部,柔轮的结构为具有外齿的环形齿圈,刚轮为具有内齿的环形齿圈,三者结合后,可实现减速传动。减速之后的运动,经柔轮与输出刚轮的内齿轮构成齿啮输出机构传递到输出轴。另外输出刚轮上的外齿轮与装在编码器上的消间隙齿轮构成无间隙的精密传动,实现编码器实时精确地测定输出轴 (滚珠丝杠)。这种结构便于加工、轴向尺寸小、扭转刚度大。
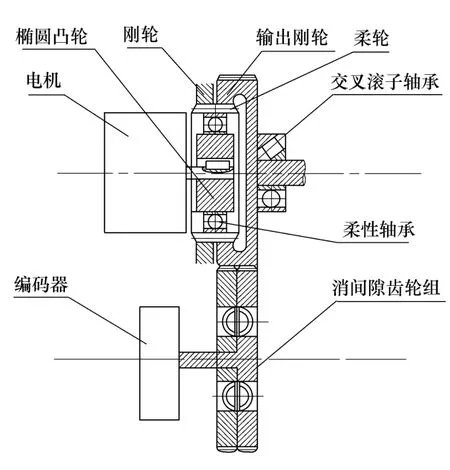
图2 精密谐波传动结构示意图Fig.2 Structure diagram of precision har monic gear drive
3 误差分析
对于无侧隙可逆的谐波齿轮传动,其运动误差极限随机幅值可用下式计算[4]:

式(1)中,Δ φ″1为谐波齿轮传动的运动误差(″);ΔT∑K为刚轮 (或柔轮 )的运动误差 ;Δ ρn为波发生器零件的径向误差;DR为柔轮的分度圆直径;ω0i为柔轮的最大径向变形量;Z∑为同时参加啮合的齿数;KB为运动误差实际测定值与计算值的比值,在预先计算时,一般取KB=0.9~1.0,本文取0.95;u为波发生器的波数;i为传动比。
已知谐波传动比为 1∶70,柔轮齿数ZR=140,精度为 7级,刚轮齿数为 142,输出刚轮齿数为140,精度为 7级,模数m=0.3。
根据齿轮精度,单个齿距极限偏差ΔT∑=9.5μm;刚轮,柔轮的不同心度e1=3μm;柔轮的径向跳动量e2=4μm;波发生器轴系径向跳动量的综合误差为e3=10μm;柔性轴承的径向跳动e7<2μm,同时啮合齿数Z∑为柔轮齿数ZR的30%~40%,则Z∑=42~56。
当输出轴转动时,刚轮和柔轮的综合误差极限幅值为:

波发生器零件的径向综合误差极限幅值为:

将上面求出的值代入式 (3),并取KB=0.95,则谐波齿轮传动运动误差的极限随机幅值为:

柔轮和输出刚轮的综合误差极限幅值为24μm,则输出刚轮和柔轮的运动误差为:

编码器上采用消间隙齿轮组与输出刚轮啮合,调整消间隙齿轮组,可使其与输出刚轮的侧隙为零,即Δ φ″3=0。
则通过消间隙齿轮组传到编码器的总径向综合误差极限幅值为

由于步进谐波传动的输出轴通过速比为 1∶1的齿轮传动与绝对式编码器相连,又知编码器旋转一周,码值变换 65 536个码,丝杠导程为12 mm,则单个码值对应滚珠丝杠螺母沿丝杠轴线方向的位移为 1.831×10-4mm,由此可计算出误差 Δ φ″将会造成 9个码值的偏差,转换成调焦镜沿滚珠丝杠轴线方向的位移误差为 1.65μm。
另外滚珠丝杠导程偏差为e2π=8μm,当在调焦时实际使用的导程为 8 mm,即滚珠丝杠所对应的转角为 240°,则由该相应导程偏差造成的调焦镜沿滚珠丝杠轴线方向位移误差为es=5.3μm。
由上述分析可知,调焦镜沿滚珠丝杠轴线方向总的位移偏差为:

4 焦面位移误差计算
为了增加调焦的精度,将调焦镜的镜面与调焦机构的直线运动方向成γ角装配,如图3所示。
则调焦镜法向位移Δx与丝杠位移Δs之间的关系为

已知该调焦镜与焦面在空间相机光学系统中的位置关系如图4所示,图中光线对焦面的入射角为α,对调焦反射镜的入射角为β,Δx为调焦反射镜沿镜面法线方向移动的位移,Δf为焦面沿镜面法线方向移动的位移。

图3 调焦镜与丝杠运动方向的关系Fig.3 Assembly angle between focusingmirror and ball screw moving direction

图4 调焦反射镜与焦面的位置关系Fig.4 Location relationship between focusing mirror and focal plane
由对应的几何关系可知:

将式 (10)带入式 (11)中,则:
已知该空间相机光学系统中α=15°,γ=12°,β=50°,则由调焦机构误差 5.55μm导致的焦面位移误差为Δf=0.342 2·Δs=1.90μm,满足相机使用要求。
5 检调焦工作测试
谐波传动机构中输出刚轮的外齿轮与绝对式编码器的消间隙齿轮组相啮合,故通过编码器的码值可以检测调焦位移。其调焦控制单元的工作原理图如图5所示,调焦编码器的信号通过编码器信号处理板运算处理,再将处理结果同理想标定值进行比较,然后将比较差值送到电控箱中,控制调焦电机工作[5]。

图5 调焦控制单元原理框图Fig.5 Block diagram of focusing structure controller platfo rm
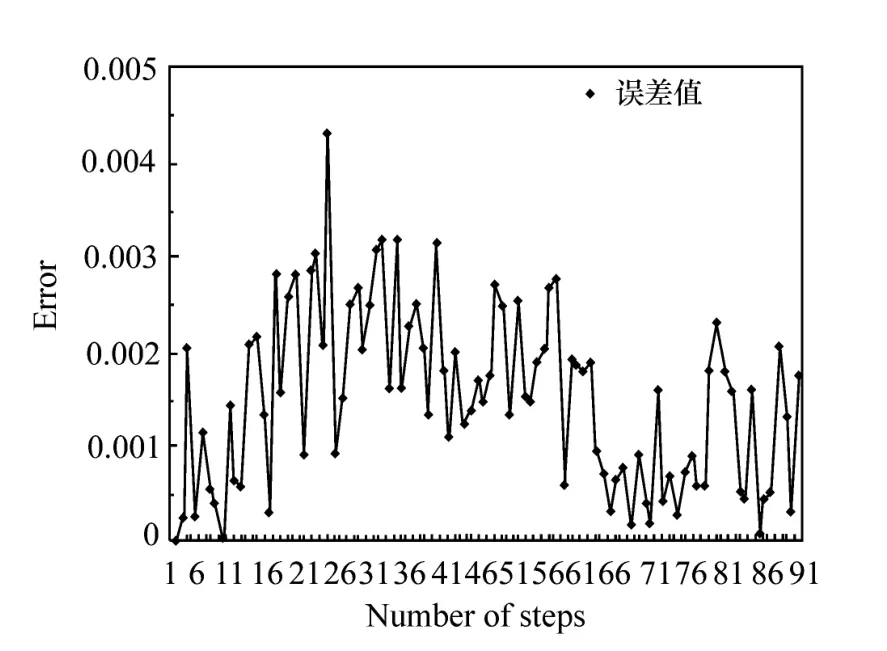
图6 位移误差 (绝对值)曲线Fig.6 Curve of displacement errors(absolute value)
在测试中,驱动电机每次走 400 step,用测微仪测量调焦机构的直线位移量,之后将实际测量值与根据编码器读数计算出的理论位移量进行比较,即可得出相应位置调焦机构的位移误差,具体测试数据如图6所示。
由图6可知测量结果的算术平均值为:标准差为:

取置信度为 99.7%,则测量的最大极限误差为:

式中,0.0015 mm为调焦结构本身的系统误差,0.0028 mm为编码器和测微仪的测量误差,推出像面的最大极限误差为 1.34μm,满足设计使用要求。
6 结 论
本文设计了一种空间相机的调焦机构,对其进行的检调焦测试表明,误差主要来源是精密步进谐波传动中刚轮、柔轮和输出刚轮的综合误差以及波发生器的综合径向误差,选用高精度齿轮可增加调焦机构的传动精度。位移精度的测量表明,该调焦机构的焦面位移精度高于 1.5μm,证明该调焦机构具有结构紧凑、精度高、稳定性好等优点。综上所述,采用精密步进谐波传动的空间相机调焦机构具备较好的传动稳定性和较高的传动效率,满足空间环境的特殊使用要求。
[1] 辛洪兵,谢金瑞,何惠阳,等.谐波传动技术及其研究动向[J].北京轻工业学报,1999,17(1):30-36 X IN H B,XIE J R,HE H Y,et al..Harmonic drive technology and its research tendency[J].J.Beijing Institute Light Industry,1999,17(1):30-36.(in Chinese)
[2] 张新洁,颜昌翔,谢涛.星载光学遥感器调焦机构的设计[J].光学精密工程,2009,17(11):2757-2761.ZHANG X J,YAN CH X,XIE T.Design of focusingmechanis m of space remote sensor[J].Opt.Precision Eng.,2009,17(11):2757-2761.(in Chinese)
[3] 张景和.精密谐波传动在三坐标测量机上的应用[J].光学精密工程,1998,6(2):44-48.ZHANG J H.Application of harmonic gear drive to 3-axesmeasuringmachine[J].Opt.Precision Eng.,1998,6(2):44-48.(in Chinese)
[4] 徐灏,邱宣怀,蔡春源,等.机械设计手册第三卷 [M].北京:机械工业出版社,1992:(24)141-166.XU H,Q IU X H,CA ICH Y,et al..M achine Design Handbook[M].Beijing:Publishing House ofMechanical Industry,1992.(in Chinese)
[5] 丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].光学精密工程,2001,9(1):36-38.D ING YL,T IAN H Y,WANGJ Q.Design on the focusingmechanis m of space remote-sensing camera[J].Opt.Precision Eng.,2001,9(1):36-38.(in Chinese)
[6] 安源,齐迎春.空间相机直线调焦机构的设计[J].光学精密工程,2009,17(3):609-614.AN Y,Q I Y CH.Design of straight-line focusing mechanis m for space camera[J].Opt.Precision Eng.,2009,17(3):609-614.(in Chinese)
猜你喜欢
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
通信电源技术(2016年1期)2016-04-16
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年28期)2014-12-01
中国光学(2013年5期)2013-11-26
中国重型装备(2013年1期)2013-11-18
振动与冲击(2012年2期)2012-02-12
现代电子技术(2009年9期)2009-06-25