某型雷达测量精度分析
2010-10-27 00:23刘春光王利伟中国人民解放军91550部队94分队116023
中国科技信息 2010年14期
刘春光 王利伟 中国人民解放军91550部队94分队 116023
某型雷达测量精度分析
刘春光 王利伟 中国人民解放军91550部队94分队 116023
结合仿真数据,通过样条拟合、测元匹配、与融合飞行器轨迹比对三种方法,对某型雷达测量精度进行综合分析。
雷达;测速;测距;样条拟合;测元匹配;差分
1 引言
本文结合仿真数据处理的结果,采用样条拟合法求随机误差、测元匹配诊断系统误差、与融合飞行器轨迹进行差分比较三种方法,对某型雷达的测距和测速的测量精度进行综合分析。
2 样条拟合统计随机误差
下面采用样条函数拟合出各测元在每个测量时间节点上的值,求出仿真数据值与拟合值的差,然后统计残差的根方差,以此来统计测量设备的随机误差[1]。
采用样条拟合得到的各站飞行器轨迹精度参见表1。
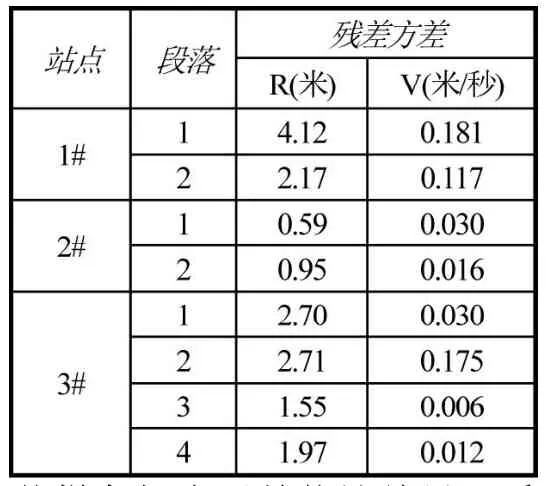
表1 样条拟合统计结果
从样条拟合误差统计结果可看出:测距参数和测速参数的随机误差都较小。
由于各站情况类似,因此在本文中统一选取数据质量最好的2#站的数据进行画图比较。
由拟合后的残差曲线可以看出:除在段落开始或结束点附近和特征点残差抖动较大外,其余点处测量数据很稳定。
样条拟合结果表明:测距的随机误差都较小,测速某些段随机误差都较大,其余大部分随机误差都较小。

图1 2#段落1各测元(测距、测速)拟合后的残差曲线图
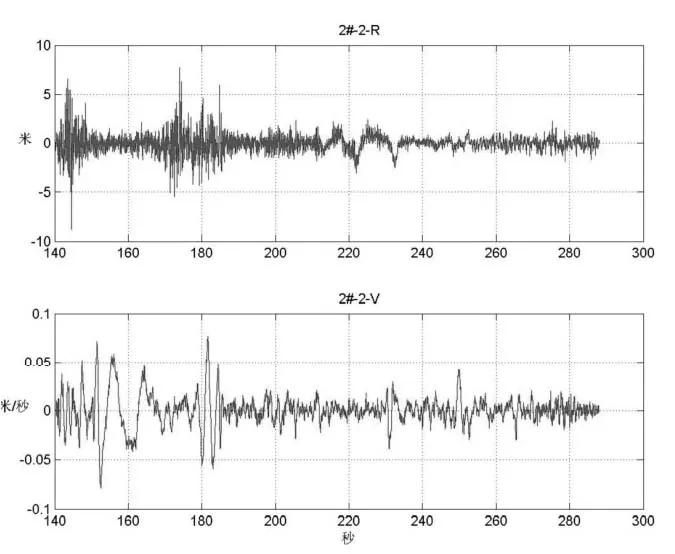
图2 2#段落2各测元(测距、测速)拟合后的残差曲线图
3 测元匹配诊断系统误差
测元匹配的基本思想:对于一种测量设备的定位测元和速度测元来说,二者在物理上是满足积分匹配和微分匹配的。积分匹配是指利用速度测元进行积分得到位置与定位测元作差,对于正常的测元来说,其差是一均值为零的近似白噪声序列,如果不满足,则说明定位测元或速度测元二者其一存在问题。例如对于差分结果如果呈现明显的线性趋势,则在很大程度上说明速度测元存在系统误差。另外,还可以使用微分匹配进行类似的检测,即对位置测元进行拟合微分然后与速度测元作差。
由于中心平滑无法对端点的数据进行处理,所以本文对测速匹配数据头尾数据赋该点的测速值,这样在作比对时,头尾数据残差为零,不会影响对中心数据的分析。
对各站测量数据采用下面方法进行处理,即对测速数据进行积分,与测距作差,统计测距残差均值[2]。
测元匹配统计结果参见表2。
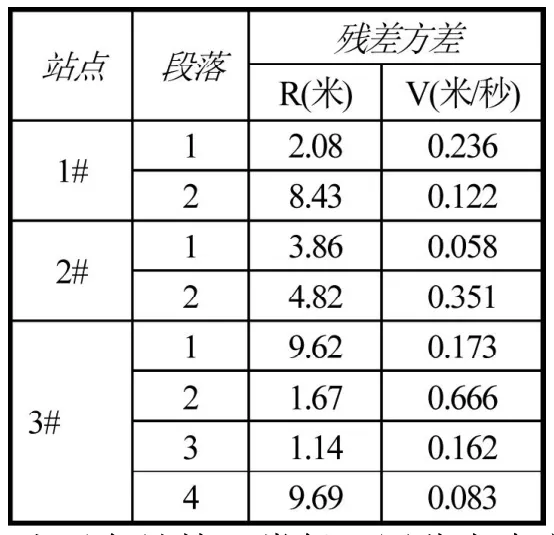
表2 测元匹配统计结果
由于各站情况类似,因此在本文中统一选取的2#站的数据进行画图比较。
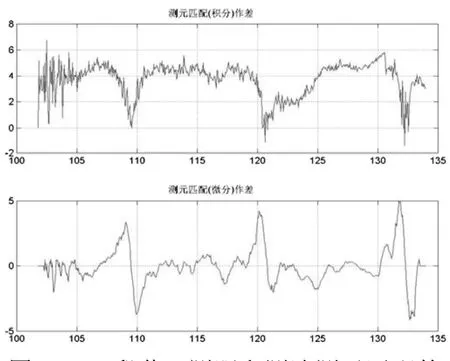
图3 2#段落1测距和测速测元匹配的残差曲线图

图4 2#段落2测距和测速测元匹配的残差曲线图
由匹配残差曲线可以看出:
在2#第1段,测距有4米左右的系统偏差;在109秒、120秒、132秒,测速有突变。在2#第2段,积分匹配残差在185秒开始残差曲线倾斜,说明该段测速数据有系统偏差。
测元匹配结果表明:此雷达测距测速都存在一定的系统误差。
4 融合飞行器轨迹反算测元
各站测量数据和融合飞行器轨迹作差,统计出测距和测速的随机误差和系统误差,参见表3。

表3 雷达测元与融合飞行器轨迹反算比对误差统计表
2 #各测元(测距、测速)与融合飞行器轨迹的差分曲线参见图5、图6。
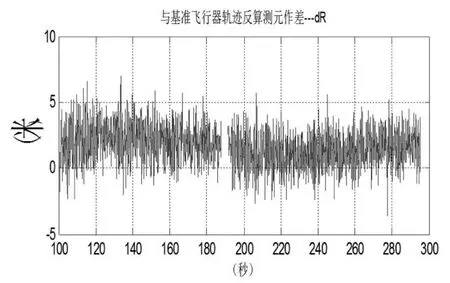
图5 2#测距与融合飞行器轨迹反算比对残差曲线图
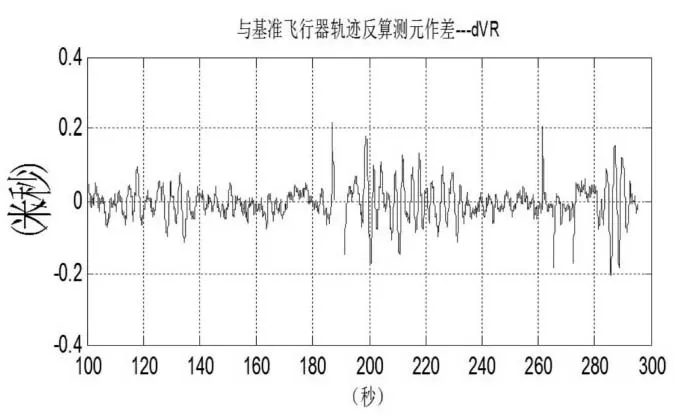
图6 2#测速与融合飞行器轨迹反算比对残差曲线图
由测元与融合飞行器轨迹比对统计表和残差曲线图可看出:
此雷达测距比较稳定,但测速在某些点有较大的随机误差。测距测速都存在一定的系统误差。
5 结论
通过上述样条拟合、测元匹配、与融合飞行器轨迹比对三种方法综合分析,可得出如下结论:此雷达测量设备测距比较稳定,但测速在某些点有较大的随机误差。测距测速都存在一定的系统误差。
[1] 刘利生.外测数据事后处理[M].北京:国防工业出版社.2000.
[2] 王正明等.弹道跟踪数据的校准与评估[M].长沙:国防科技大学出版社.1999.
10.3969/j.issn.1001-8972.2010.14.015
刘春光(1981-),助理工程师,本科,大连沙河口区五一路200号94分队;
王利伟(1980-),助理工程师,硕士,大连沙河口区五一路200号94分队。
猜你喜欢
矿山安全信息(2021年21期)2021-07-04
矿山安全信息(2020年37期)2020-12-26
图学学报(2020年5期)2020-11-13
矿山安全信息(2020年2期)2020-03-05
矿山安全信息(2020年3期)2020-03-04
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年4期)2017-11-23
软件(2017年6期)2017-09-23
计算机测量与控制(2017年6期)2017-07-01
中国惯性技术学报(2017年1期)2017-06-09