
宽带数字阵列雷达相对时延测量的新方法
2010-09-27 08:34
电讯技术 2010年5期
(1.电子科技大学 电子工程学院,成都 610054;2.西南电子设备研究所,成都 610043;3.中国民用航空局第二研究所,成都 610041)
1 引 言
收发波束均以全数字方式实现的宽带全数字阵列雷达正成为相控阵雷达的一个重要发展方向,其核心是利用直接数字频率合成(DDS)技术将信号产生、频率源与幅相控制融于一体[1]。全数字阵阵元后接单独的发射和接收通道,而器件制造公差、温度及环境特性都会使得通道间时间延迟量、幅度、相位不一致[2],造成波束严重失真。同时,宽带数字阵列雷达采用大时带积LFM脉冲,以提高目标的检测性能及对目标进行成像[3],为了抑制阵列孔径效应,需要采用时延法来进行宽带信号波束形成[4]。因此,准确快速地测量各个通道之间相对时延并加以校正,是全数字阵列能否正常工作的关键技术之一。
时延测量技术可分为模拟和数字两大类,由于测量精度和转换时间等要求,数字测量方法已逐渐取代了模拟方法[5]。数字时延测量方法有游标法、抽头延迟线法、差分延迟线法[6]等,为了获得高测量精度,还可进行插值处理[7]、非线性校正,引入DLL法或PLL法[8]等。上述方法不但复杂(一般需专门芯片或设备),而且从原理上也不适合多通道大时带积LFM脉冲信号的时延测量。
Dechirping技术是针对LFM信号提出的对不同延迟时间LFM信号进行脉压的一种方式[9],它不仅运算简单,而且可以降低对硬件设备的要求,已被广泛应用于SAR和ISAR中。其基本原理是将LFM参考信号与不同延迟时间的LFM信号做差频处理,由于LFM信号的特殊性,差频后将得到频域位置与延迟时间有关的单频信号,测得单频信号的频域位置,即可计算出延迟时间。
基于此,本文提出一种新的大时带积LFM脉冲信号在不同通道间相对时延的测量方法,该方法利用了Dechirping技术及FFT快速算法,不但所需器件简单,而且测量精度及实时性较好,并可同时对多个通道间的相对时延进行测量。理论分析及仿真结果证明了这种测量方法的有效性。
2 测量系统及算法
为简化起见,假设宽带数字阵列通道是已校正过非线性误差的理想线性通道,通道误差主要是时延及附加幅相误差。图1是测量系统的具体实现框图,系统分为测量组件和待测通道两部分。测量组件包括参考通道、延时器、共轭器、加法器、乘法器、ADC及运行算法的DSP;参考通道和待测通道的区别在于参考通道的带宽和时宽要求更大(当满足带宽和时宽要求时,阵列中任意通道可作为参考通道)。每个通道输出信号特性由中心处理机发出的幅度、相位、频率控制字及通道性能共同决定。
测量步骤如下:中心处理机同时向N个待测通道发出相同的幅度、相位、频率控制字,输出LFM脉冲信号(由于通道误差,通道输出信号之间会存在时延差、幅度差、相位差),将这些LFM脉冲信号经过相应的延时后再通过加法器,得到各个通道输出信号之和Xo(t),与参考信号Xref(t)的共轭相乘后(即进行Dechirping),输出信号再经过ADC采样,在DSP中运行时延算法,得到N个待测通道与参考通道间的相对时延值。
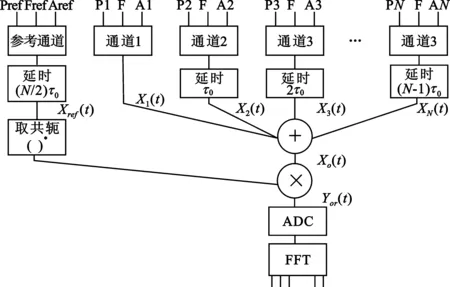
图1 测量系统框图Fig.1 The measurement system block diagram
图1中,参考信号Xref(t)是将参考通道输出的时宽为Tref的LFM脉冲信号通过延时量为(N/2)τ0的延时器后而得到的;Xn(t)(n=1~N)是将第n个通道输出的时宽为Tp的LFM脉冲信号,通过延时量为(n-1)τ0的延时器而得到的(τ0为已知确定量,可使用延迟线或在中心处理机中进行数字延时来实现)。
参考LFM脉冲信号Xref(t)为

(1)
式中,u为频率变化率,u=B/Tp;aref、φref、τref分别为参考通道幅度、附加相位及附加时延;fc为载波频率;Tp、B为待测通道LFM信号时宽和带宽。
rect(u)表示脉冲信号:
N个待测通道输出的LFM脉冲信号经过相应的延时后,再由加法器相加,得Xo(t):

exp{j2πfc[t-(n-1)τ0-τn]}·
exp{jπu[t-(n-1)τ0-τn]2}=
exp{j2πfct-j2πfc[(n-1)τ0+τn]}·
exp{jπut2-j2πu[(n-1)τ0+τn]t+
jπu[(n-1)τ0+τn]2}
(2)
式中,an、φn、τn分别为第n个待测通道幅度、附加相位及附加时延。
如图1所示,将Xo(t)与参考信号Xref(t)的共轭相乘,即做差频处理,当Tref≥(N-1)τ0+Tp时,差频后输出信号Xor(t)为

(3)
由于aref、an,φref,φn、τ0、τref、τn都是确定量,设arn=arefan,φrn=φn-φref,Δτrn=τref-τn,

代入式(3)中,得:

Δτrn]t}exp{jφrn}
(4)
由式(4)可以看出,Xor(t)是由N个长度为Tp的单频脉冲信号线性叠加而成。由此,Xor(t)的傅里叶变换Xrn(f)由N个对应的sinc状的窄脉冲组成,脉冲宽度为1/Tp。

exp(-j2πf[(n-1)τ0-τn]}exp{jφrn}
(5)

(6)
式中,Δτrn为第n个待测通道与参考通道的相对时延。可见,只要求出fn,就可计算出第n个待测通道与参考通道的相对时延Δτrn。由于N及τ0已知,则fn可由Xor(t)进行数字化后再做FFT得到:
(7)
上述测量方法的本质是利用LFM脉冲信号的特性,将待测通道与参考通道时延差Δτrn的时域测量转换为对频域相应位置fn的测量,具体处理过程见图2。

图2 测量过程原理图Fig.2 The schematic diagram of measurement process
3 系统参数的确定及性能分析
(1)时延τ0的确定。由上文可知,测量时会得到N个通道的N个时延量,为了进行校正,必须确定这N个时延量与通道号的对应关系。图1中延迟器的作用就是将通道的相对时延人为地加大,以便确定所测出时延量对应的通道号。设通道之间最大相对时延差的绝对值为Δτmax,则在式(5)中为了避免产生通道间的测量模糊,需满足τ0≥2Δτmax;
(2)参考信号时宽Tref的确定。由图2所示,要同时测量N个待测通道,必须满足条件Tref≥(N-1)τ0+Tp,再考虑到通道的最大时延差,则Tref必须满足:Tref≥(N-1)τ0+Tp+2Δτmax;
(3)测量系统时间分辨率Δτ0。式(4)中时域脉冲长度为Tp,则其频域分辨率为1/Tp,由式(6)得到Δτ0与频域分辨率的关系:Δτ0u=1/Tp。根据u的定义:u=B/Tp,从而Δτ0=1/Tpu=1/B。可见,测量系统时间分辨率和LFM信号带宽B成反比关系。同时,要获得满意的测量效果,则任意两个频域sinc脉冲之间的间隔必须满足:uτ0≥1/Tp;

fs≥u{(N-1)τ0+2Δτmax}=
(8)

(5)测量方法不受信号载频fc影响,且和各个通道输出信号的幅度及附加相位无关。当测出相对时延量Δτrn后,利用式(4)容易得到相对幅度arn及相对相位φrn;
(6)可由中心处理机来实现参考通道及待测通道所需的时延(Nτ0/2及(n-1)τ0,n=1~N),这样,图1各个通道的延时器可以省去。整个测量系统就简化为一个参考通道及一个共轭器、一个加法器、一个乘法器及一块DSP。
4 仿真试验分析

当存在相对时延时,则由式(5)所得sinc窄脉冲位置会偏离图中实线位置,偏离的大小和方向表明了相对时延的大小和正负,图中用虚线表示了这一点。图3中频率轴右起第3根实线(对应通道3)、第6个实线(对应通道6)、第12根实线(对应通道12)附近处有虚线,表明这几个通道存在相对时延,虚线位于实线右边的代表正时延,位于左边的代表负时延,由于第8通道时延量等于时间分辨率,图中虚线和实线重合而无法进行分辨。

图3 频域仿真结果Fig.3 The simulation results in frequency domain
将图3中sinc窄脉冲峰值的频域坐标fn,代入式(7),即可得到第n个通道间相对时延量Δτrn。实际时延量与测出的时延量及均方差之间的关系见表1,组件信噪比为60 dB,所测值由1 000次蒙特卡罗计算得到。
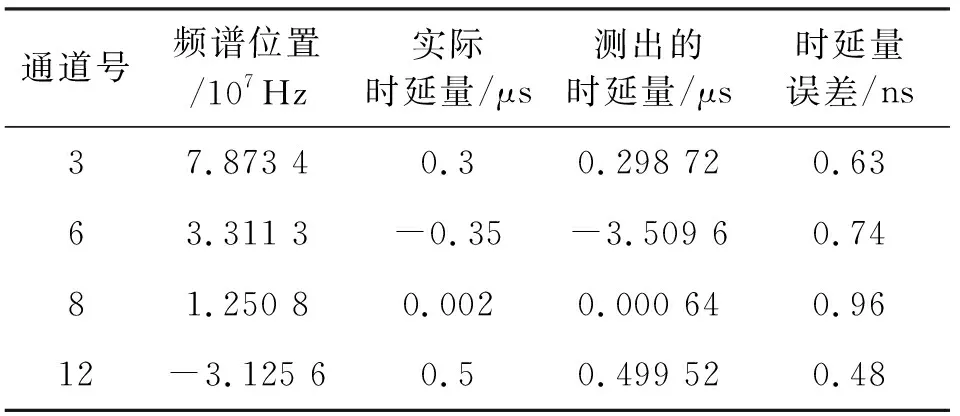
表1 实际时延量与所测出的时延量Table 1 Delays existing and delays measured
5 结 论
基于大时带积LFM脉冲信号和Dechirping技术,本文提出了一种全数字宽带阵列通道间相对时延的测量方法,并对其进行了理论分析及仿真研究。结果表明,该测量方法简单有效,成本低,实时性好,测量精度较高,易于工程化,在进行系统设计时,可将测量组件作为一个部件嵌入到数字阵列系统中进行多通道实时测量。同时,只要添加相应的算法,测量组件还可用于大时带积LFM信号其它性质的测量(幅度、附加相位测量等)。
参考文献:
[1] 吴曼青,王炎,靳学明.收发全数字波束形成相控阵雷达关键技术研究[J].系统工程与电子技术,2001,23(4): 45-48.
WU Man-qing,WANG Yan,JIN Xue-ming. Research on Key Technology of DBF Phased Array Radar[J]. Systems Engineering and Electronics,2001,23(4):45-48.(in Chinese)
[2] 龚耀寰.自适应滤波 [M]. 2版.北京:电子工业出版社,2003:314-319.
GONG Yao-huan. Adaptive Filtering [M]. 2nd ed.Beijing:Publishing House of Electrionics Industry,2003: 314-319.(in Chinese)
[3] Ender J H G, Brenner A R.PAMIR-A wideband phased array SAR/MTI system[J].IEE Proceedings on Radar, Sonar and Navigation,2003,150(3):165-172.
[4] 文树梁,袁起,秦忠宇.宽带相控阵雷达的设计准则与发展方向[J].系统工程与电子技术,2005,27(6):1007-1011.
WEN Shu-liang,YUAN Qi,QIN Zhong-yu. Design criteria and development trend of wideband phased array radar[J]. Systems Engineering and Electronics,2005,27(6):1007-1011.(in Chinese)
[5] 张延,黄佩诚.高精度时间间隔测量技术及方法[J].天文学进展,2006,24(1):1-15.
ZHANG Yan, HUANG Pei-cheng. High-Precision Time-Interval Measurement Techniques and Methods[J]. Progress in Astronomy,2006,24(1):1-15.(in Chinese)
[6] 吴海涛,王丹妮,边玉敬.Cs Sync 1000型罗兰C接收机系统时延的测量方法[J].电子测量与仪器学报,2002,16(3):22-27.
WU Hai-tao,WANG Dan-ni,BIAN Yu-jing.Delay Measurement Methods of Cs Sync 1000 Loran-C Receiver System[J]. Journal of Electronic Measurement and Instroment, 2002,16(3):22-27.(in Chinese)
[7] 潘继飞,姜秋喜,毕太平.基于内插采样技术的高精度时间间隔测量方法[J].系统工程与电子技术,2006,28(11):1633-1636.
PAN Ji-fei,JIANG Qiu-xi,BI Tai-ping.High precision time interval measurement method based on interpolating sampling technology[J].Systems Engineering and Electronics,2006,28(11):1633-1636.(in Chinese)
[8] Szplet R,Kalisz J,Szymanowski R.Interpolating time counter with 100-ps resolution on a single FPGA device [J]. IEEE Transactions on Instrumentation and Measurement, 2000,49(4):879-883.
[9] 保铮,邢孟道,王彤.雷达成像原理[M].北京:电子工业出版社,2005:24-29.
BAO Zheng,XING Meng-dao,WANG Tong.Radar Imaging Technique[M].Beijing:Publishing House of Electrionics Industry,2005:24-29.(in Chinese)
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
人民交通(2021年17期)2021-09-09
娃娃画报(2019年10期)2019-12-17
诗潮(2019年8期)2019-08-23
启蒙(3-7岁)(2019年3期)2019-04-03
雷达学报(2018年3期)2018-07-18
电测与仪表(2016年16期)2016-04-12
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
印制电路信息(2015年6期)2015-12-30
