悬臂起重机力矩保护系统的构建*
2010-09-22 06:55:22李忠明余梓唐
电气传动自动化 2010年5期
李忠明,余梓唐
(义乌工商学院机电信息分院,浙江义乌322000)
1 引言
起重机广泛应用于港口、货场、码头等场所的货物装卸作业,因超载引起起重机承重部件断裂甚至起重机倾翻的事故时有发生,解决方案是在起重机上加载力矩保护系统,自动检测和控制工作力矩[1、2]。对于额定负荷与起重位置无关的起重机,只需实时测量起重力并参照恒定的额定负荷进行起升控制即可,而对于额定负荷与起重位置相关的起重机,需同时测量起重力和起重幅度两个变量,由此计算出工作力矩,再依据起重机力矩特性曲线进行起升控制[3-5]。
本文主要讨论力矩安全保护系统的基本构成,分析和比较SAR型和△-Σ型A/D转换电路应用于力矩保护系统时的优缺点,针对起重机实际工作环境,通过在力传感器端构造信号初级调理电路,以解决工作现场传感器信号长距离传输问题[6],通过隔离执行电路电源与系统电源的方法解决系统干扰问题。
2 系统构成
系统构成如图1所示,由信号采集、MCU控制处理、显示及驱动等部分组成。系统能够进行基本函数运算,提供一定量的存贮单元以存放与机械性能相关的特性曲线,根据用户要求的不同,人机交互界面可采用触摸屏或LED+轻触键盘。
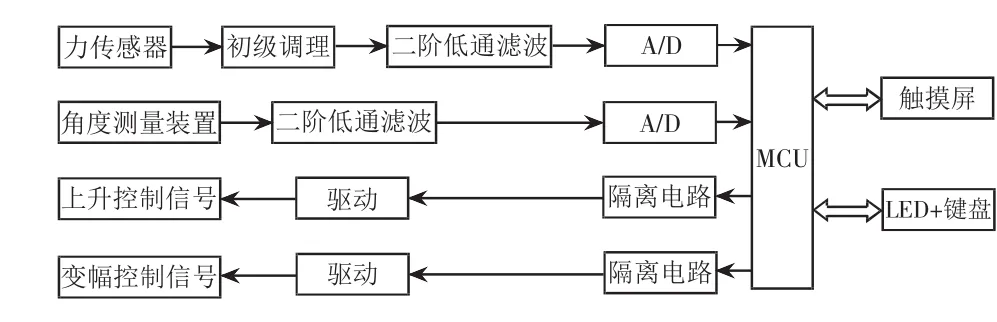
图1 系统构成
系统前端测量单元由力测量和角度测量两部分构成,其中力传感器采用应变片,角度测量采用基于加速度计的角度测量装置。加速度计所采集的起重机臂架加速度信号,经角度测量装置转换成起重机臂架转角的模拟电压输出,其成本是旋转编码器的十分之一,精度及可靠性比重锤式角度传感器和连杆式角度传感器明显提高。
系统工作现场存在电源污染和大功率设备(变频器、制动器、大功率电机等)造成的严重干扰,采用二阶低通滤波器以滤除各种分量的高频噪声,采用隔离电路将执行电路电源和系统电源隔离,以防止来自现场的动力电源干扰。实际中,力传感器与控制器间线缆长达100米以上,信号受现场干扰噪声很大,传输不稳定,因此在力传感器端设置信号初级调理电路以解决复杂工业现场传感器信号长距离传输问题。
3 模似信号调理
信号测量的精度是系统最终精度实现的决定因素之一,由于起重机工作现场存在电源污染和变频器、制动器、大功率电机等大功率设备所产生的电磁场对信号传输造成较严重干扰,首先在系统的信号输入部分采用二阶低通滤波电路以滤除各种分量的高频噪声,电路如图2所示。
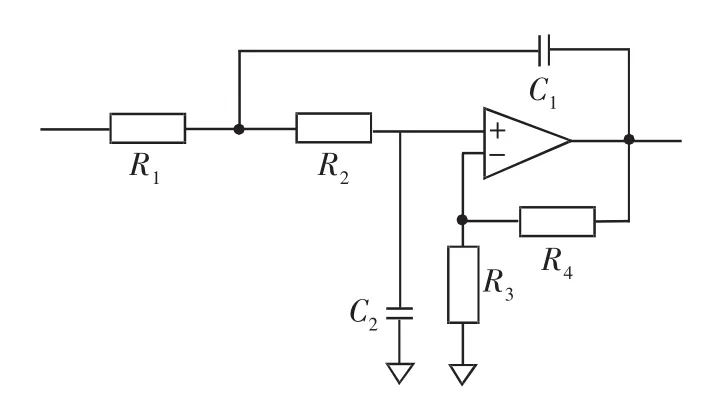
图2 二阶低通滤波电路图
电路中角频率及阻尼系数各参数为:
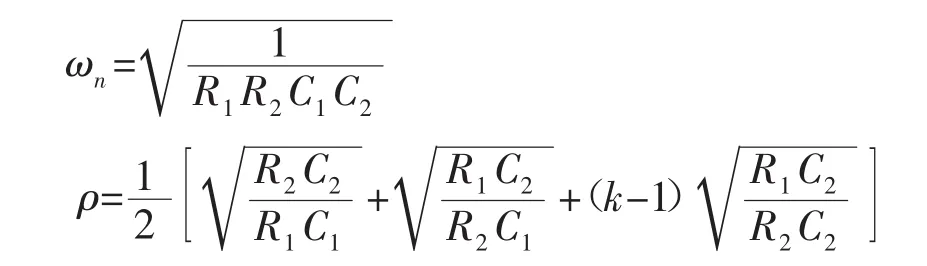
其中增益 k=1+R3/R4,取,则电路截止角频率为:

实际使用中,增益k一般设置为1.5以下,如果接近或者大于2,则电路将处于不稳定的振荡状态。一般现场情况下截止角频率选在30Hz以下即能满足要求,有些现场情况需设置在10Hz以下,这时需要将C1和C2选在3-20μF之间。如有需要可以考虑在二阶低通滤波的前端进行RC无源滤波。在经过以上各滤波电路的调理之下,起重机现场的高频噪声将被有效滤除,而信号延迟即使在最严重的情况下(截止角频率在10Hz以下)也只是ns级,完全能够满足电路系统的整体要求。
4 A/D转换电路的选择
影响力矩保护系统精度和综合响应速度的一个重要因素是A/D转换电路,可采用基于ADS7809的快速型A/D转换电路和基于CS5505的△-Σ型A/D转换电路。
4.1 基于ADS7809的SAR型A/D转换电路
转换器内部采用逐次比较电路,采样频率10-500kHz。此电路对输入部分的噪声没有抑制作用,要求调理电路的输出没有各种分量的噪声,但这在起重机工作现场是不可能的,任何现场的信号经调理后不可能将各种噪声抑制在绝对零状态,因而误差被叠加在A/D转换的输出中,这就要求对A/D转换结果进行进一步高质量数字滤波。构造数字滤波器需要大量的存贮单元和消耗处理器的运算资源,如构造一个长度为128字的数字滤波器,需要256字节的内存占用,同时队列操作、滤波等函数的建立需要大量的编程工作量。
在力矩保护系统中,建立一个128字深度的数字滤波器,其数据采集时间每次循环需要1-2ms左右(11.0592MHz晶振)。为能更好地消除信号噪声,需构建滤波阶数更高的数字滤波,只要控制整个数据采集和处理时间在10ms以内,就可以达到精度和实时控制要求。如图3所示为基于ADS7809的A/D转换电路。
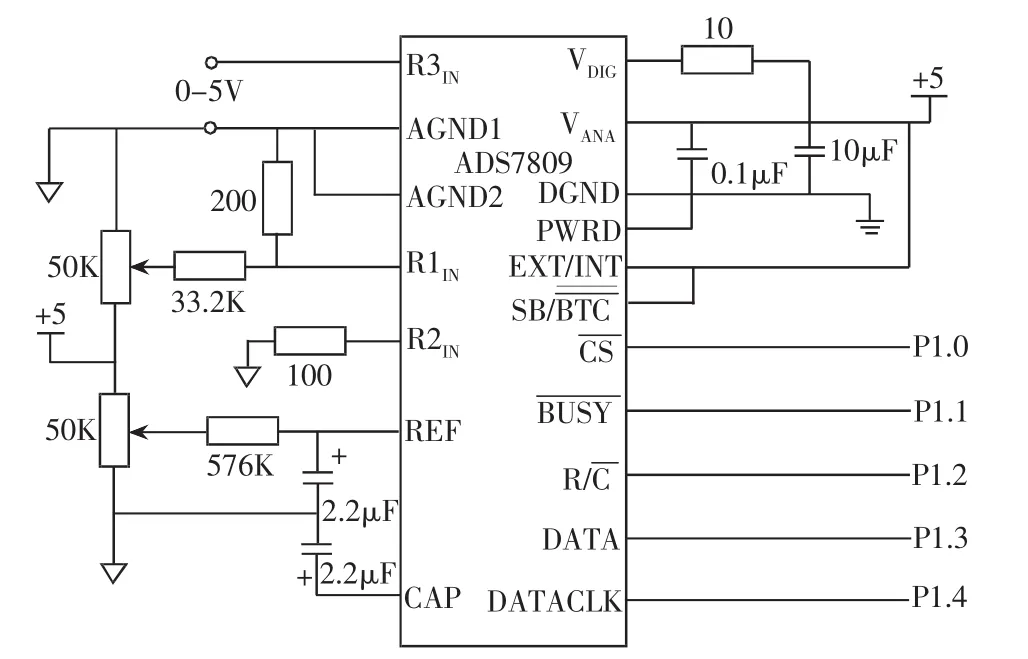
图3 基于ADS7809的A/D转换电路
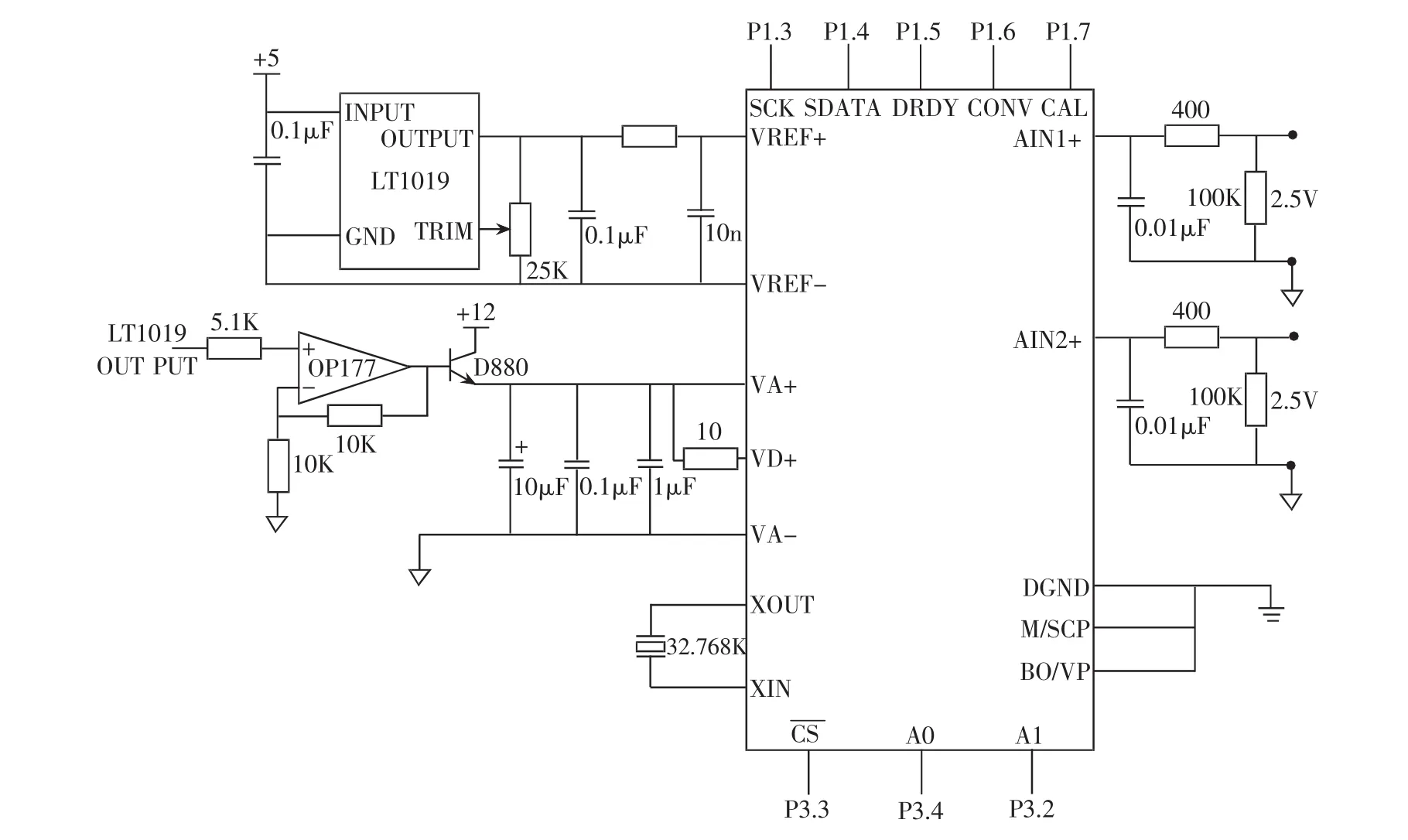
图4 基于CS5505的A/D转换电路
4.2 基于CS5505的△-Σ型A/D转换电路
这类转换电路的转换速度较慢,一般为每秒几十次,但转换器内部一般都具有数字滤波器。一次转周期内即可由转换电路内部集成的处理器用其内部数字滤波器滤除信号噪声,如图4所示为基于CS5505的A/D转换电路。
电路中基准电压由集成电路LT1019提供,配置成2.5V,在VA+、VD+之间串接一个0.5W 的10Ω电阻,能够保证电路工作时VA+>VD+。各路模拟电压输入端采用单端电压模式并进行RC无源网络滤波。
由于CS5505本身整合了一个片内数字滤波器,这是一个梳状滤波与低通滤波器相结合的滤波器,同时也是一个有限脉冲响应滤波器(FIR),相对于转换周期,数据的提供没有延迟,即从采样开始,一个数据转换周期后即在输出接口提供本次转换的结果,相对于输入信号,不需要外加若干周期的延迟。CS5505所提供的梳状滤波特性对线间50Hz和60Hz的串扰具有较高的拟制能力,即使在这些整数频点的±1%带宽内(50Hz±1%、60Hz±1%、100Hz±1%、120Hz±1%、150Hz±1%、180Hz±1%、200Hz±1%、240Hz±1%),滤波器都提供较强的拟制能力[7]。
4.3 两种A/D转换电路的比较
上述两种电路在速度方面有较大差异,图3所示的SAR型电路的转换速度比图4所示的△-Σ型电路高2个数量级。但考虑到力矩保护系统是应用于一个高强度复杂噪声的工业环境中,要使整个测量系统达到分辨率和响应速度两个方面的要求,必须对此二类电路进行综合评价。
噪声抑制方面,△-Σ型具有明显优势。SAR型不但没有噪声抑制能力,而且由于采用了高速比较器,并且受快速变换电路的影响,SAR变换器本身成为一个不可忽视的干扰源;电路综合实现方面,SAR转换器在转换期间要采用特殊的采样/保持电路来保持输入信号在采样期间的稳定,这些电路对信号源的阻抗相对较低,且为容性阻抗,所以需要一个稳定可靠的放大电路来保持输入电平在采样期间的稳定,需要一个较好的调理电路,而△-Σ转换器不需要,因为△-Σ转换器一般都具有高输入阻扰的输入缓冲放大器;成本方面,在同样的分辨率下,SAR的成本要比△-Σ的成本高3倍以上。
针对力矩保护系统所处噪声环境,要使系统达到要求的精度,必须使A/D实现12位以上分辨率。由于SAR没有噪声抑制能力,所以在微处理器中必须增加数字滤波器,且至少达到128字深度。一次真正的数字采样将由128字A/D转换来实现,加上数字滤波器处理时间,将使SAR的实际转换速率下降两个数量级,最后与△-Σ相当(略高),达到几倍于△-Σ的速度。同时,如果使用SAR,则软件设计方面的工作量加大,数字滤波器占用了大量的内存和处理器运行时间。比较结果如表1所示。
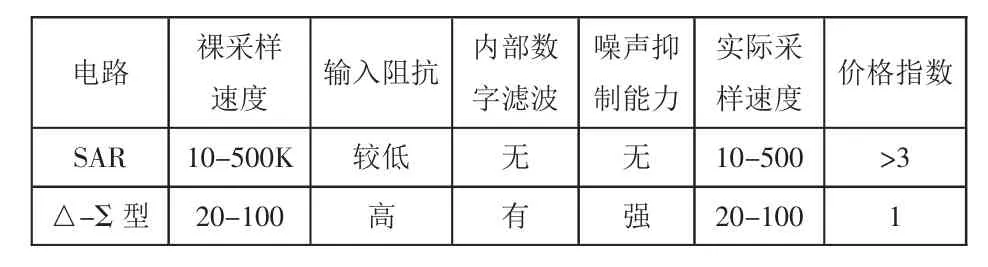
表1 SAR型与△-Σ型两种电路的比较
由此可见,采用△-Σ电路时,虽然实际采样速度较SAR较低,但能满足实时控制响应速度的要求,且信号调理电路简单,无需构造数字滤波器,占用处理器资源较少,价格便宜。应该是正确的选择。
5 控制执行电路防干扰措施
影响执行电路的主要干扰源来自现场的动力源干扰,如现场并网的大功率电气设备启动和制动时产生的浪涌等,防范的措施是将执行电路的电源与系统电源隔离,使用不同的电源。电源部分电路如图5所示,信号隔离采用光耦,如图6所示。
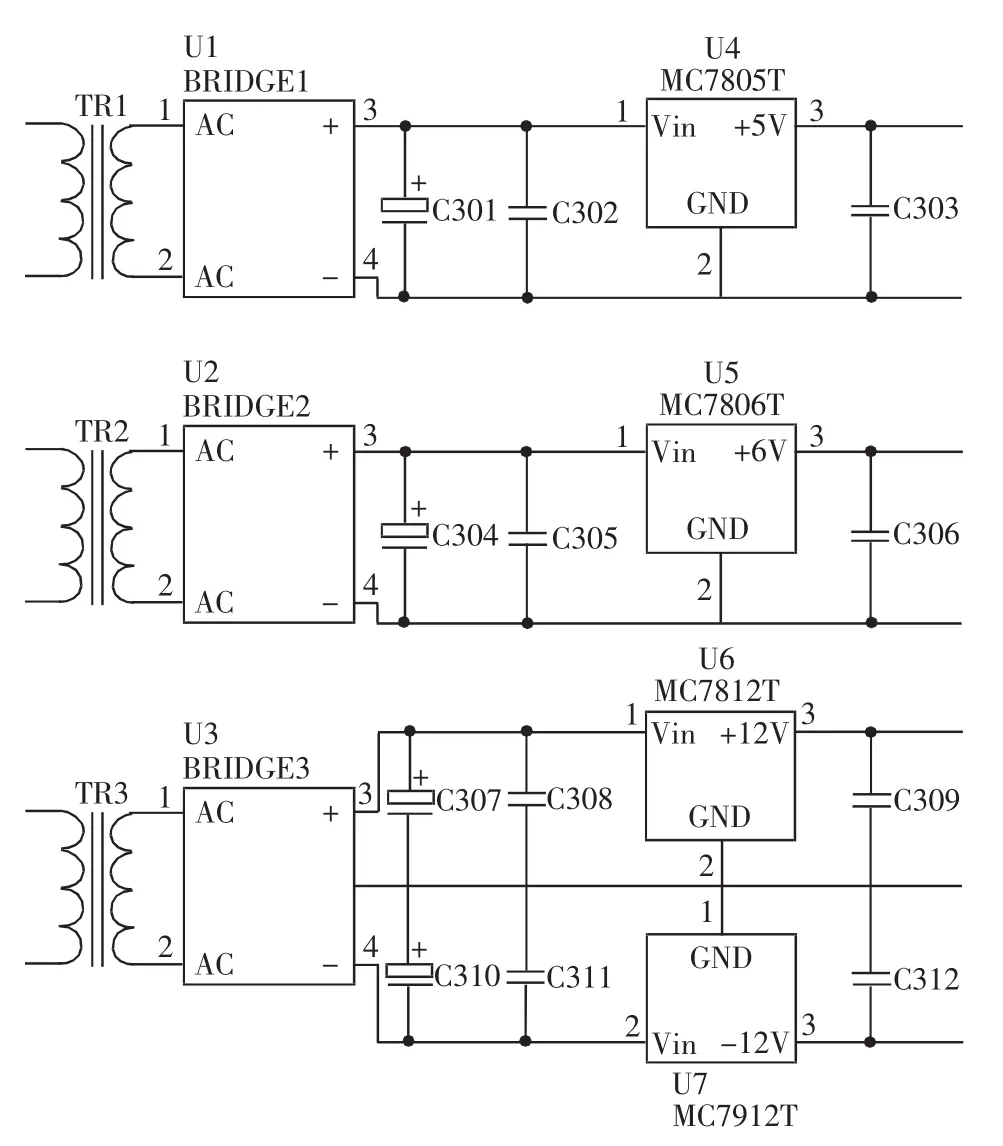
图5 电源隔离电路

图6 信号隔离电路
信号端使用系统数字电源,控制信号经整形后驱动光耦发光二极管控制执行端,执行端三极管导通后控制继电器动作,控制部分使用独立的12V电源。采用上述措施后,不会发生由于电源等干扰而引起的控制继电器发生误动等情况。
6 结论
在设计力矩保护系统时,通过在力传感器端构造信号初级调理电路,能够有效解决传感器信号长距离传输问题;通过隔离执行电路电源与系统电源的方法能有效解决系统干扰问题。同时,采用△-Σ型A/D转换电路比SAR型A/D转换电路简单,且在输入阻抗、噪声抑制以及价格方面有明显优势。
[1] GB 12602-1990,起重机械超载保护装置安全技术规范[S] .
[2] GB 7950-1999,臂架型起重机起重力矩限制器通用技术条件[S] .
[3] 胡月华,王冬梅.单片机力矩限制器的研制[J] .工业控制计算机,2005,18(5):42-43.
[4] 王安敏,何兆民,张学强.基于AT89C52单片机的起重机力矩限制器[J] .仪表技术与传感器,2008,6:24-25.
[5] 梁桂航,于京诺,宋进桂等.单片机在臂架型起重机力矩限制器上的应用[J] .工程机械,2007,38(9):6-9.
[6] 李忠明.复杂工业现场传感器信号长距离传输研究[J] .电气传动自动化,2003,25(4):33-35.
[7] Cirrus Logic.CS5505/06/07/08 Product Data Sheet(pdf)[J/OL] .2009:1-31.
猜你喜欢
电子制作(2019年11期)2019-07-04 00:34:38
中国特种设备安全(2018年10期)2018-12-18 02:16:46
电子制作(2018年16期)2018-09-26 03:26:50
石油化工建设(2018年2期)2018-07-11 01:24:56
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
航天制造技术(2016年6期)2016-05-09 08:32:51
火控雷达技术(2016年2期)2016-02-06 02:29:00
探测与控制学报(2015年4期)2015-12-15 15:00:56