基于FPGA的电机DSVM直接转矩控制实现
2010-09-21 06:09:52楼忠兴
大电机技术 2010年2期
楼 忠 兴
(浙江义乌工商学院计算机工程系, 浙江 义乌 322000)
基于FPGA的电机DSVM直接转矩控制实现
楼 忠 兴
(浙江义乌工商学院计算机工程系, 浙江 义乌 322000)
针对传统直接转矩控制方案中转矩波动问题,提出了一种基于离散空间矢量调制(DSVM)技术的电机直接转矩控制(DTC)的控制系统。该系统采用FPGA作为核心器件,极大地减少了分离元件的使用,具有极大的灵活性、扩展性和通用性,抗干扰能力强。仿真和实验结果证明了所提出的基于 DSVM 电机直接转矩控制算法能够有效减小转矩脉动。
直接转矩控制;DSVM;FPGA
引言
直接转矩控制技术(简称DTC)是继矢量控制之后又一高性能的交流变频调速技术[1]。其是根据磁链、转矩要求,从几种电压空间矢量中选取一个最佳矢量,使得电机在特定状态运行。电压矢量的选择依赖于电磁转矩误差、定子磁链误差和磁链角。基本直接转矩控制使用的优化矢量开关表,一个采样周期只输出一个电压矢量,在低速时转矩脉动将会比较大[2]。在DSVM技术中,每个采样周期分为3个相等的时间段,每个时间段中作用1个电压矢量。改变这3个电压矢量的作用顺序,不会改变最终的控制目标,但是对转矩脉动有很大影响。通过分析每个采样周期中的转矩波形,得到优化的电压矢量选择表[3]。
FPGA是当今应用最广泛的一类可编程专用集成电路 ASIC(Application Specified Integrate Circuit)。电子设计工程师利用它可以在办公室或实验室里设计出所需要的专用集成电路,从而大大缩短了产品上市时间,降低了开发成本。FPGA是一种将门阵列的通用结构与 PLD的现场可编程特性结合于一体的新型器件,可以实时地对外加或内置的 RAM 或 EPROM编程,实时地改变器件功能,极大地提高了电机控制系统设计的灵活性和通用性[4]。
1 基本直接转矩控制原理
直接转矩控制的原理图如图1所示,主要包括:电机模型、速度PI调节、转矩和磁链调节器、开关状态表、逆变器等几个部分。
图1中直接转矩控制系统通过检测定子电压、电流计算出定子磁链ψ、电磁转矩T和转速ω,由磁链得到磁通角,由磁通角得到定子磁链所在扇区。将磁链和电磁转矩的计算值与给定磁链值 ψ、转矩参考值T的差值分别送入磁链调节器与转矩调节器,根据磁链调节器和转矩调节器的输出控制信号以及定子磁链所在扇区查找开关状态表,得到逆变器的开关信号,驱动逆变器产生三相电压以驱动电机。为了更好地控制转速,引入转速闭环控制单元,给定速度∗ω和反馈速度ω的差值进入速度调节器,经PI运算后得到转矩的参考值∗T,以增强控制系统的抗干扰能力。
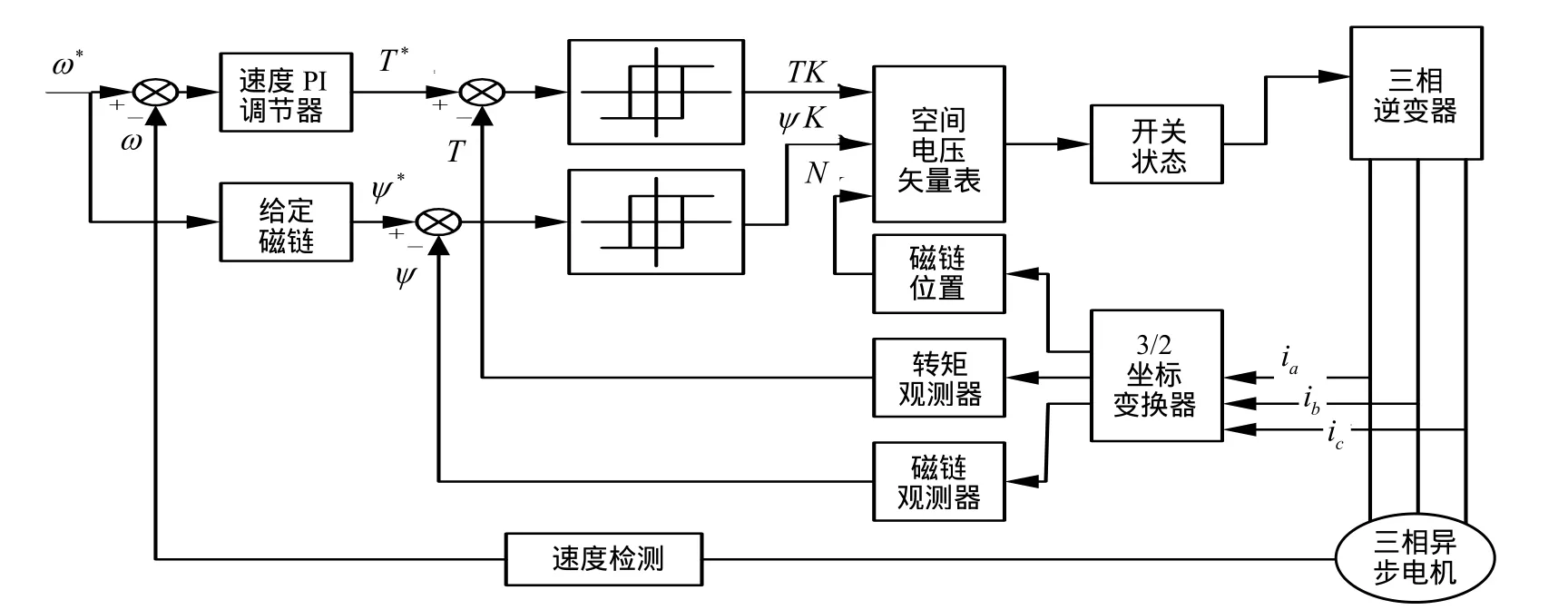
图1 直接转矩控制系统的基本原理框图
2 离散空间矢量调制技术
2.1 电压矢量对转矩的影响
异步电动机在定子坐标系下的数学模型,可写成空间矢量的形式。
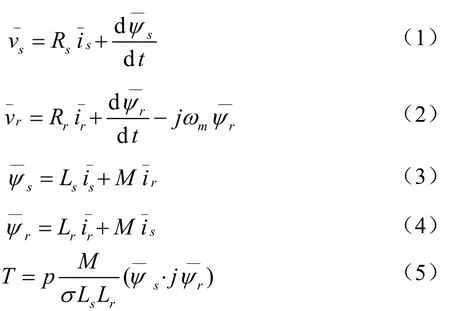
式中:vs——定子绕组电压;_
M——定子和转子绕组之间的互感;
Ls——定子绕组的自感;
Lr——转子绕组的自感;
p——电机极对数;
ωm——转子电角速度;

根据上列公式,可求得对于一个循环周期tΔ内,定、转子在 t1+k时刻的磁通表达式为


则在 t1+k时刻,力矩可按照下式重新计算得到:

结合上述三式,并忽略tΔ的平方项,可得到t1+k时刻电磁力矩为:

2.2 离散空间电压矢量的产生
低速时转矩和电流脉动与电压矢量的数目是有密切关系的。基本直接转矩控制使用的优化矢量开关表,一个采样周期只输出一电压矢量,在低速时转矩脉动将会比较大。若把一个采样周期分为多个时间段,每个时间段输出不同的电压矢量,从而可以合成许多新的电压矢量。在一个采样周期中,根据输入的磁链、转矩信号,输出尽可能多的电压矢量,则转矩和电流脉动相应就会减小。然而电压矢量数量的增加需要定义非常复杂的开关表[5]。但若将一采样周期分为三个时间段不需要太复杂的开关表,且可使得转矩和电流波动的明显减小,因此可以在脉动补偿及复杂的电压选择策略中取得一个较好的折衷。
如图2所示,假设定子磁通在扇区1,则基本直接转矩控制会根据磁通、转矩的估计值和给定值的差来决定使用u0、u2、u3、u5或u6中的某一个电压矢量。
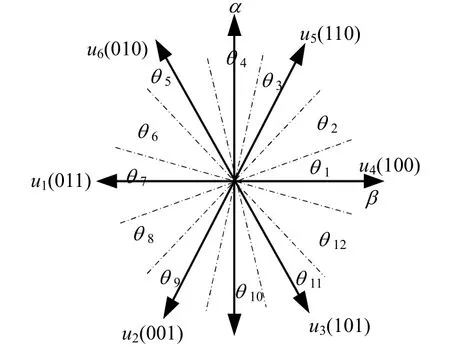
图2 定子磁链在扇区1可使用的电压矢量
采用三时间段离散电压矢量调制技术,可以用到19个电压矢量,如图3所示。每个交点表示一个综合电压矢量的终点,例如:665表示由空间电压矢量u6、u6和u5合成,23Z表示由u2、u3和一个零电压矢量合成,5ZZ则表示由u5和两个零电压矢量合成。每个矢量占用三分之一的控制输出周期时间。电压矢量的数量增加可定义更加准确的开关表以便能够根据转子速度选择电压矢量。开关表可通过分析施加的电压矢量与相应的转矩和磁链变化联系的方程来推导。

图3 三时间段用电压矢量
2.3 开关表的定义
充分利用离散电压调制可用的19个电压矢量,考虑低速、中速和高速三个区域,综合电压矢量对转矩的作用受反电动势的影响,定义了四个开关表。低速区和中速区各一个开关表,高速区两个开关表。同时,为细分磁链和力矩变化,开关表中将磁链滞环比较器分成两层,力矩滞环比较器分成五层。
假定电机逆时针旋转,磁通位于高速区,若力矩给定信号增加,则有四个矢量 333、332、223、222可供使用,333、332使磁链减小,223、222使磁链增加。
3 FPGA在实现DSVM直接转矩控制中的应用
基于FPGA的电机DSVM直接转矩控制系统如图4所示。FPGA采用Xilinx公司的Spantan-II系列的XC2S100—5 PQ208型芯片。
控制模块是整个系统的核心部分。它包括若干功能模块,其中最主要的任务是利用 XC2S100实现DSVM—DTC的PWM信号产生。其他模块是为了产生相应PWM信号的外围辅助功能电路,其任务包括与上位机进行串口通信,接受A/D转换信号及光电编码信号的输入等。

图4 DSVM—DTC功能模块图
4 仿真
图5为给定转速ω=100r/min,负载转矩T=150N·m时系统仿真曲线。从图5可以看出,基于DSVM的直接转矩控制的转矩响应曲线有了明显改善。图6为给定转速ω=100r/min,在系统稳定运行后突加负载转矩T=150N·m时系统仿真曲线。从图6可以看出,在突加负载情况下,基于DSVM的直接转矩控制系统的动态响应时间较短,且转矩没有明显波动。
5 实验
实验中用到的电机参数为:功率P=2kW,定子电阻 Rs=0.56Ω , 转 子 电 阻 Rr=0.77Ω,定 子 电 感Ls=0.0656H,转子电感 Lr=0.0711H,定转子互感Lm=0.0543H。电机额定转速ne=1500r/min。

图5 恒定转速、恒定负载时系统仿真曲线

图6 恒定转速、突加负载时系统仿真曲线
图7(a)为传统基本直接转矩控制效果。直接转矩控制中转矩波动比较大;图7(b)则是采用了DSVM的直接转矩控制后的转矩阶跃响应曲线。由图可见,转矩的脉动相对而言大为减小。

图7 转矩响应曲线
6 结束语
基于DSVM的直接转矩控制结构简单、转矩响应速度快、对参数变化鲁棒性强,同时该技术针对传统直接转矩控制低速时脉动大的缺点,将一个控制周期分成多个时间段,利用多个电压矢量进行合成输出,使得低速时转矩脉动有效降低。使用FPGA技术开发的直接转矩控制数字芯片,其主频快,控制周期短,有利于电机平稳转动,可以方便地实现基于DSVM的直接转矩控制算法。
[1] 李夙. 异步电动机直接转矩控制[M]. 北京:机械工业出版社,2001: 41-97.
[2] 郭前岗, 李耀华, 孟彦京. 直接转矩控制中电压矢量对电磁转矩的影响[J]. 中小型电机, 2004,31(6):6-9.
[3] 刘贤兴, 黄旦旦, 等. 基于DSVM异步电动机直接转矩控制系统. 江苏大学学报(自然科学版)[J]. 2005, 26(3):257-260.
[4] 徐志军, 徐光辉. CPLD/FPGA的开发与应用[M].电子工业出版社, 2002.
[5] 姚伟, 金阳, 殷雄. 采用离散空间电压矢量调制方法的异步电机直接转矩控制[J]. 浙江工业大学学报, 2002, 30(1):17-20.
The Application of FPGA in DTC Control System Based on DSVM
LOU Zhong-xing
(Department of Computer ,Yiwu Industrial & Commercial College, Yiwu 322000, China)
Direct torque control using the pure integral voltage model for torque observation will cause the fluctuations of torque. An improved direct torque control (DTC) system based on discrete space vector modulation (DSVM) is presented. FPGA is used as the core of the system, it implements the most logic functions. The distinctive advantages of the system are flexible,expandable, stable, simple and compact. The simulation and experimental results show the feasibility of the new method.
direct torque control; DVSM; FPGA
TM343.01.2
A
1000-3983(2010)02-0034-04
2008-08-20

楼忠兴(1967-),1989年毕业于安徽工学院应用电子技术专业,主要从事自动化装备研发和教学工作,实验师。
猜你喜欢
大电机技术(2022年2期)2022-06-05 07:28:34
传感器与微系统(2018年7期)2018-08-29 00:44:20
电测与仪表(2017年24期)2017-12-19 05:15:18
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:52
电测与仪表(2015年3期)2015-04-09 11:37:42