基于WEB的PLC远程对象控制实验
2010-09-20 03:29:26赵先林刘瑞通
湖南理工学院学报(自然科学版) 2010年3期
张 敬 , 赵先林, 陈 曦, 刘瑞通
(湖南理工学院 机械工程学院, 湖南 岳阳 414006)
基于WEB的PLC远程对象控制实验
张 敬 , 赵先林, 陈 曦, 刘瑞通
(湖南理工学院 机械工程学院, 湖南 岳阳 414006)
提出了一种基于PLC的远程实验解决方案, 利用PLC及其配套的CP243-1IT通讯模块, 完成远程机械手的控制, 实际效果较好.
PLC; 远程实验; 机械手
引言
PLC具有高可靠性和稳定性, 能在恶劣的环境下正常工作. 随着网络技术和PLC技术的发展, 利用这一特点, 将之运用于基于WEB的远程实验室解决方案, 使学生能通过网络模拟各种实验, 达到远程控制的目的, 对其进行研究可以加速远程实验室的构建. 这样进行实验可不受时间和地点的约束, 可以使用户在任何时间、任何地点通过网络进行实验, 因此有利于学生实验室的开放. 同时可以充分利用实验室资源,减少实验设备的购置, 实验室的维护费用和工作量也会大大降低.
1 系统构成
本研究以气动机械手做为控制对象, 是基于远程实验室而开发的一套实验系统. 本系统硬件装置是由西门子S7-224 PLC、CP243-1 IT网络通讯模块, 一台装有Win2000 Server操作系统和STEP7-Micro/ WIN32软件的电脑、网络集线器、摄像头、气动机械手、Internet网络和远程计算机等构成. 如图1所示.
图1所示网络系统, 包括局域网控制网络和Internet互联网远程控制网络, 使局域网和Internet上的远程计算机通过WEB网页访问CP243-1 IT模块来对PLC及与其相连的机械手进行控制, 同时通过访问与主服务器相连的摄像头, 可以看到机械手的运行状况, 当然也可以通过PLC反馈到WEB网页上的信息,了解机械手的运行状况.
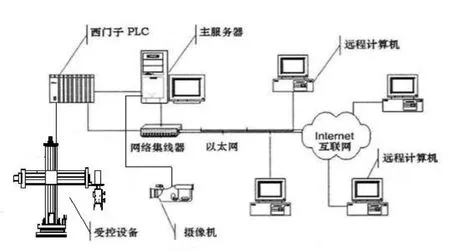
图1 远程实验系统结构图
2 局域网远程控制的实现
因为CP243-1IT模块完全兼容CP243-1模块, 我们将用局域网技术与CP243-1IT模块通讯, 通过IT模块, 将程序经网线、交换机传输到S7-224 PLC,并监控其运行状况, 实现局域网机械手的控制. 实践证明, 通过局域网执行程序下载、监控等操作, 其速度远大于本地机械手控制速度. 另一种方式是, 直接访问Win2000 Server的服务器, 对其进行编程、监控.这里我们具体介绍IT通讯模块方式.
2.1 硬件连线
具体硬件连线如下: S7-224 PLC与CP243-1 IT通过扁平电缆相接, 输入电源皆为24VDC, 且共大地,气动机械手与PLC相连, PLC与主服务器通过PPI电缆连接; CP243-1IT、主服务器和远程计算机接入同一局域网, 同时主服务器上联有摄像头. 这样构成了一个完整的局域网实验系统.
2.2 CP243-1 IT模块组态
在主服务器上打开STEP7-Micro/WIN32, PPI电缆通讯成功后, 进入“工具” “因特网向导”, 点击“下一步”, 进入界面给IT通讯模块配置一个IP地址. 点击“下一步”, 选择一个连接, 点击“下一步”, 选择“此为服务器连接”, 其余步骤按默认即可. 并将此配置下载到PLC中[1].
完成上面步骤, 相当于给PLC分配了一个可远程网络连接的IP地址, 局域网内的任何一台电脑, 都可以通过这个IP地址, 利用STEP7-Micro/WIN32软件编写程序, 并监控程序的运行状况.
2.3 局域网下载设置
设置PG/PC接口: 选择自己的网卡通讯TCP/IP Realtek RTL8139/810x ; 然后点击“通信”双击刷新, 就找到了远程局域网内的PLC 224; 完成后, 在远端就像本地一样操作、调试、编程下载、并监控程序的运行状况. 而且局域网传入速度为100Mbps, 远大于PPI电缆下载方式.
3 Internet互联网远程控制的实现
互联网远程机械手控制, 是在局域网远程控制的基础上, 利用CP243-1 IT模块通讯功能实现的. CP243-1 IT具有HTTP和FTP服务器功能, 前面对CP243-1IT进行IP地址组态, 就可以通过WEB网页访问与之连接的PLC的寄存器变量, 通过读写这些变量来控制机械手的动作. 这里我们通过编程实现了机械手的基本操作, 上、下、前、后、旋转、抓取、放松等动作. 在调试时可通过主服务器上的摄像头观察机械手的动作, 程序是通过远程连接至IT通讯模块下载到PLC中. 并且通过FTP服务器可将制作的网页和Java控件上传到CP243-1IT的文件系统中. 另外, 我们还必须在校园网入口, 做端口映射, 使主服务器和CP243-1 IT模块映射到外网. 为实现Internet远程控制, 在局域网控制的基础上, 还需满足以下要求.
3.1 虚拟控制界面制作
3.1.1 主界面
要制作控制界面需要用到Dreamweavers软件和Java语言. Dreamweavers是集网页制作和网站管理于一身的所见即所得的网页编辑器. 它是一套针对专业网页设计师特别设计的可视化网页开发工具. 图2是用Dreamweavers软件开发的WEB控制的主界面.
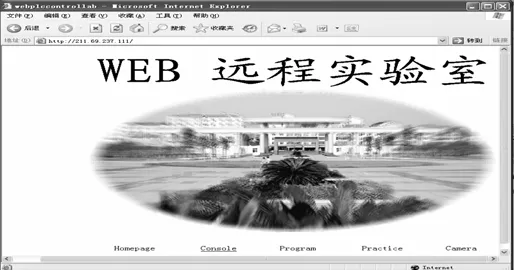
图2 WEB控制主界面
3.1.2 监控界面
Java是Sun公司推出的一种面向对象编程语言. 它是一种通过解释方式来执行的语言, 语法规则和C++类似. 同时, Java也是一种跨平台的程序设计语言. 用Java语言编写的程序叫做“Applet”(小应用程序), 用编译器将它编译成类文件后, 将它存在WWW页面中, 并在HTML档上作好相应标记, 用户端只要装上Java的客户软件就可以在网上直接运行“Applet”[2].
本文利用到Dreamweavers和Java相关知识,利用Dreamweavers, 并嵌入Java控件, 编辑网页,可通过CP243-1IT自身的FTP上传功能, 或者Dreamweavers的FTP功能, 将做好的网页文件上传到CP243-1IT模块的文件系统中. 这样就可以从远端访问CP243-1IT模块的文件系统中的网页, 并操作控制PLC使相关辅助继电器的电平发生变化,达到远程监控的目的[3]. 图3是PLC寄存器变量监控界面.
图3中Type代表输出(Q)、输入(I)寄存器、特殊(SM)寄存器、变量(V)寄存器、辅助(M)寄存器; Data Type中前面所选的寄存器的读取方式, 包括bit、byte、word、dword四种方式; Offset与bit为寄存器地址的选择. 例如图3中第一个值I寄存器, 选择是byte类型, byte共有8位(bit), 后面Status Value显示I0.1至I0.7的状态值分别为01011001. 通过这种方式我们便可以监视每一个变量的状态.

图3 PLC寄存器变量监控界面
3.1.3 虚拟控制界面
远程实验的特点决定了实验者不能够直接操作真实的手动输入输出设备. 因此, 设计了带有Java Applet和JavaScript的虚拟工作台, 它具有如下功能:
(1) 由于PLC的输入不是从远程计算机进行修改, 输入的内容由虚拟工作台中的记忆单位所替换;
(2) 如果一个实验者在其程序中产生了一些错误, 受控设备的活动就是不可预料的. 为了阻断错误运行的程序并重置受控设备, 在虚拟工作台中设置了一个“暂停”按钮, 用于阻断正在运行的程序, 以及一个“停止”按钮, 用于启用CPU的停止模式. 因此周期性中断组织块35被启用, SFC46系统功能被有条件地调用;
(3) 为了在远程计算机上直接监视PLC的输入输出状态, 在虚拟工作台中设置了输入输出状态指示器. 并实现了输入输出状态指示器同JavaScript动态更新.
图4是远程实验系统的控制台, 虽然界面简单, 但完全可满足实验的要求, 并且可以自定义按钮, 适应各种控制系统, 不仅仅是本实验的机械手的控制. 图4中辅助继电器开关置0或置1代表开关的“打开”和“关闭”.

图4 远程实验系统控制台
3.2 机械手程序设计
通过西门子公司专为S7-200系列PLC设计开发的STEP7软件即可对PLC进行编程控制, 向PLC中写入程序. 机械手模型由我们根据实验需要设计而来, 机械结构采用滚珠丝杆、滑杆、气缸、气夹等机械部件组成; 电气方面有步进电机、步进电机驱动器、传感器、开关电源、电磁阀等电子器件组成. 本机械手模型可以较好的模拟工业机械手的运行状态. 在本实验中即是写入机械手控制程序. 机械手PLC控制流程如图5所示.
3.3 端口映射
因为主服务器和CP234-1 IT模块都是处于校园网内网中, 而Internet网络, 属于外网, 所以, 我们必须在校园网服务器中, 把我们的实验控制系统的主服务器和CP234-1 IT模块的IP映射到外网. 这样没有防火墙的阻隔, Internet网上的主机就可以访问系统并控制机械手的运行[4].

图5 机械手控制流程图
3.4 主服务器
主服务器是装有Win2000 Server版操作系统的电脑, 该服务器采用酷睿双核CPU, 2G内存, 加独立显卡的高配置电脑组成. 为了满足远程实验的需要, 完善实验系统, 本系统还在主服务器上, 安装有摄像头; 这样学生可以在做远程实验时, 一边观察机械手的运行状况, 一边调试, 达到一种真实的效果. 主服务器组建了FTP服务器, 解决了实验文件, 实验数据共享的问题, 能更好的指导学生实验.
4 结论
(1) 通过CP243-1IT创建基于WEB的远程实验室是可行的.
(2) 在远程实验系统中, 虚拟工作台具有实用价值并可使用JavaScript和网页进行设计.
(3) 由于数据传输的延迟, 远程实验室系统不适用于实时性强的场合, 有待提高实效性.
(4) 由于整个系统是基于WEB浏览器上, 所以与平台无关, 具有很高的可移植性.
最后, 通过对基于WEB的PLC远程控制实验方法的研究, 将会对远程控制技术在工业应用、科学研究、远程教育等方面产生极大的促进作用. 该技术与企业网融合, 使企业的内部资源达到优化配置, 可使其外部条件达到最佳利用, 在激烈的市场竞争中处于有利位置. 在今后对系统进行改进, 提高实效性, 将会促进整个实验系统的推广应用.
[1] 宋伯生. 可编程控制器配置[M]. 北京: 中国劳动出版社, 2005
[2] 胡伏汀. Java程序设计实用教程[M]. 北京: 清华大学出版社, 2004
[3] 关 智. 基于Web的PLC远程实验系统的研究[D]. 沈阳工业大学电气工程学院硕士学位论文, 2007
[4] 陆魁军. 计算机网络工程实践教程[M]. 北京: 清华大学出版社, 2005
PLC Remote Control Experiment Based on WEB
ZHANG Jing, ZHAO Xian-lin, CHEN Xi, LIU Rui-tong
(College of Mechanical Engineering, Hunan Institute of Science and Technology, Yueyang 414006, China)
The paper presents a solution of remote experiment based on PLC. The control on remote manipulator will be accomplished with PLC and related CP243-1IT. Through the examples indicate that the reliability of system is high.
PLC; remote experiment; manipulator
TP241, TP214
A
1672-5298(2010)03-0039-04
2010-05-06
张 敬(1981- ), 男, 湖南岳阳人, 湖南理工学院机械工程学院讲师. 主要研究方向: 机电一体化控制
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
计算机应用(2020年5期)2020-06-07 07:06:44
电子制作(2019年16期)2019-09-27 09:35:04
电子制作(2017年17期)2017-12-18 06:40:48
单片机与嵌入式系统应用(2017年7期)2017-07-31 21:57:23
电子制作(2017年8期)2017-06-05 09:36:15
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
河南科技(2014年11期)2014-02-27 14:17:10
网络安全与数据管理(2011年24期)2011-08-08 02:31:52