工业级全站仪在BEPCII中的应用研究
2010-09-11 05:35:34王小龙门玲鸰
核技术 2010年9期
罗 涛 董 岚 李 波 王小龙 门玲鸰
(中国科学院高能物理研究所 北京 100049)
工业级全站仪在BEPCII中的应用研究
罗 涛 董 岚 李 波 王小龙 门玲鸰
(中国科学院高能物理研究所 北京 100049)
北京正负电子对撞机(BEPCII)重大改造工程中,结合TDA 5005工业级全站仪特点,根据BEPCII中工程技术要求,做了一系列储存环内控制点及仪器设备基准点的测量。分析工业全站仪ATR三维坐标测量的精度及可靠性,探讨其在加速器准直测量中运用的可行性,给出了有益的结论,为同类加速器准直测量应用及拓展工业全站仪应用领域提供了技术依据。
BEPCII, 工业全站仪, TDA 5005, ATR
北京正负电子对撞机(BEPCII)工程是国家重大科学工程项目。为大幅提高对撞机整体性能,在原有BEPC隧道内增加一个储存环,实现双环对撞“一机两用”的改造。BEPCII储存环由正、负电子环组成,周长都是237.53 m,两环束流中心距离1.179 m,总体布局如图1。它们在南北两点交叉,距离是65.83 m。南北交叉点为对撞区,南对撞区安装北京谱仪(BESIII),北对撞区通过旁路管道将正、负电子环的外半环连一起,供同步辐射专用模式使用,周长241.13 m[1]。
在这样环形控制网测量中,工业级全站仪能在较长距离测量中弥补激光跟踪仪不足,其测量精度较高,在储存环准直测量中起重要作用,本文对其性能及储存环测量作若干探讨和分析。

图1 BEPCII储存环及跟踪仪测量示意图Fig.1 Laser tracker measurement and storage ring of BEPCII.
1 瑞士徕卡TDA5005型工业全站仪
1.1 TDA 5005特点
Leica TDA5005工业全站仪的测距精度:标准模式(1 mm+2PPM);跟踪模式(5 mm+2PPM)。
在120 m内绝对测距精度可达0.5 mm/0.02″,在~20 m精度可优于0.3 mm/0.012″,可比拟激光跟踪仪测距精度。测角精度0.5″。
1.2 TDA 5005各项指标差补偿
TDA5005指标差改正包括补偿器、垂直度盘、水平视准差、水平轴倾斜误差、及考虑上述各指标差下的一个综合改正[2]。此外,自动目标识别(ATR)准直差的ATR1是视准线和CCD像机阵列中心轴线在水平和垂直方向的偏差,包括视准差和垂直指标差。用激光跟踪仪反射镜(38.1 mm和22.225 mm)进行ATR1准直差改正(图2a、2b)时,距100 m处瞄准并找对反射镜中心较困难,因此做一个与反射镜同样大小的球,中间打穿并嵌入玻璃,在球心处玻璃上镀膜(图2c)。我们先人工瞄准此光学目标,然后仪器不动换上激光跟踪仪反射镜进行多次ATR1准直差改正。

图2 各种激光跟踪仪反射镜与光学目标Fig.2 Different types of the laser tracker reflector.
1.3 工业全站仪的ATR实验
储存环所有控制点及设备基准点均为球状吸附底座(为激光跟踪仪反射镜设计),在全站仪测量中用激光跟踪仪38.1 mm反射镜测量。按仪器要求进行ATR1准直差改正后,全站仪ATR目标在较远距离得到较好角度2C指标差(2C为角度测量不符值),但近处始终超限。为此尝试调整ATR1准直差改正,进行远、中远、近处及多处改正。根据储存环工程要求及激光跟踪仪测量结果,角度2C值要<5 s,即<5 s合格,否则不合格,结果如表1。
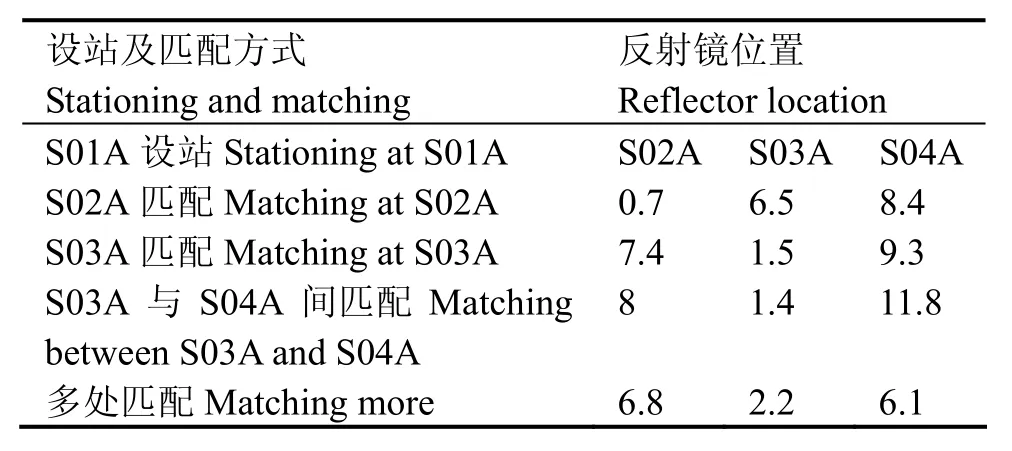
表1 38.1 mm激光跟踪仪反射镜ATR实验结果(单位:s)Table 1 The ATR experimental results (in s) for 38.1 mm laser tracker reflector.
结合ATR原理和储存环内全站仪测量特点,我们改变反射镜大小,把原来38.1 mm激光跟踪仪反射镜换成22.225 mm反射镜。经ATR1准直差改正后,反射镜位置2 m、2.5 m、S02A、S03A、S04A、S06A和71 m的结果分别为9.3、1.1、0.8、1.9、4.6、4.5和0.3 s。因此全站仪ATR有效距离为2.5 m,小于相邻控制点距离~3 m。因实验次数有限,为扩大统计样本数,提高结论可靠性,用22.225 mm反射镜进行储存环北半环全站仪测量,并对数据进行ATR角度2C值统计分析,结果如表2。

表2 储存环北半环全站仪测量ATR照准2C值统计(单位:s)Table 2 Statistics (in s) for ATR experiment 2C of total station measurement in north half of the storage ring.
由表2,ATR测角2C值主要集中在2.5 s以内,远小于5 s规定值,说明22.225 mm激光跟踪仪反射镜能很好完成全站仪ATR测量[3]。基于此结论,全站仪瞄准目标后向反射镜发射激光,激光反射回来由CCD相机捕获,程序计算反射光的中心位置,并换算成水平角(垂直角)改正数,根据改正数由伺服马达步进到棱镜的中心位置,精确瞄准。计算CCD捕获反射光中心位置时,主要用反射光成像的图像特征来精确确定中心位置,虽然38.1 mm激光跟踪仪反射球反射光较强,但反射光成像图不如22.225 mm的。这也说明为什么反射球在一定距离内无法自动识别目标。
2 TDA5005在储存环测量中的应用
2.1 大地四边形测量
2.1.1 测量方案
BEPCII隧道东西两侧各有一个起算控制点,作为全环控制点、设备基准点等平差计算起算数据。两起算点间距~70 m,为避免起算数据误差,进行两起算点间联测,要求较长距离内获较高测量精度,且测量点数较少,所以TDA 5005工业测量全站仪刚好满足需求。
进行起算点大地四边形测量避免起算点误差。在起算点附近各选一点组成一大地四边形,各点上架设全站仪,精密对中整平后对其余各点进行人工瞄准四测回边角观测,测距15次后测量平均值[4]。
2.1.2 大地四边形平差计算
该大地四边形为狭长型,固定S01A至S33A方向。在数据预处理中,做好整个大地四边形粗差剔除和闭合差检查。最后用方差分量估算,得该大地四边形测量精度为:测距中误差为0.2 mm,测角中误差为0.978 s。大地四边形计算结果显示有东西两侧延长趋势[5],具体四边形精度见表3。
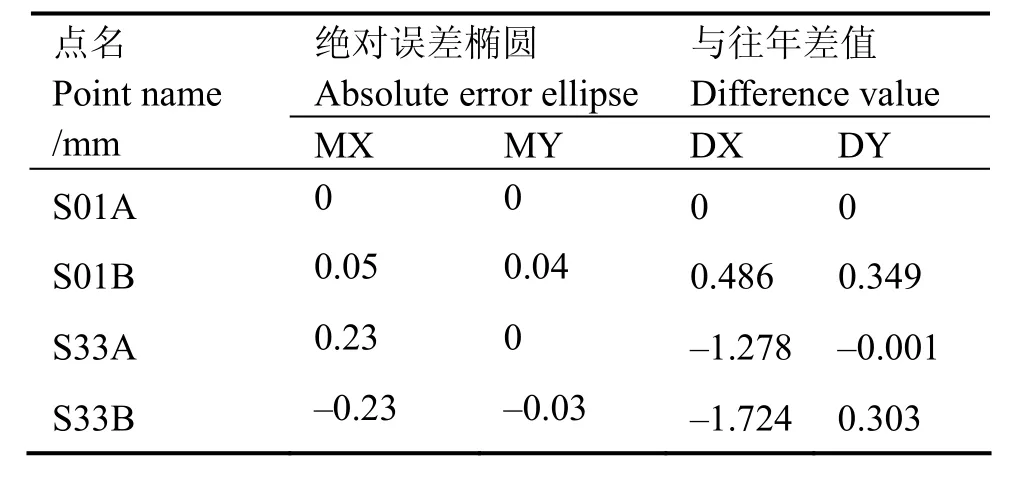
表3 大地四边形平差计算结果(单位:mm)Table 3 The adjustment results (in mm) of geodetic quadrangle.
2.2 储存环北半环两测回测量
2.2.1 测量方案
从S01段控制点绕北环至S33段控制点,最终通过储存环通道联测闭合。全站仪基本在S03A、S05A……S29A、S31A附近自由设站,除永久点S01A和S33A外,其他每次设站前后观测三段控制点(仅A、B)并前后分别观测远近处各一个C点和一个磁铁基准点。在S01A、S01B、S33A和S33B上架设全站仪,并在两侧分别增加一控制点G,以增加公共点个数(图3)。
设站观测中,以前方向第一段A点为起始方向,盘I顺时针对各点边角观测。最后一点倒镜,盘II逆时针对各点边角观测。每次全站仪自由设站对各点进行二测回边角观测。

图3 全站仪设站观测方案(a)和观测情况(b)Fig.3 The stationing and measuring scheme (a) and situation (b) for the total station.
2.2.2 储存环北半环平面网平差计算
通过工业全站仪测量得到各站测量点在仪器坐标系下的坐标值。并检核角度2C值等指标差,去除相应粗差。对实测数据预处理,得到全部测量点平面坐标转换到已知点坐标系下坐标值,并以此为平差计算初始值。以储存环东西两侧永久点坐标值为起算数据,并根据经验输入激光跟踪仪测边测角验前中误差,用专为BEPC储存环编制的Survey5.0软件计算。计算过程需多次输入测边测角验前中误差值来逼近真实值,达到与验后单位权中误差一致。表4是储存环北半环平面网平差精度统计结果。
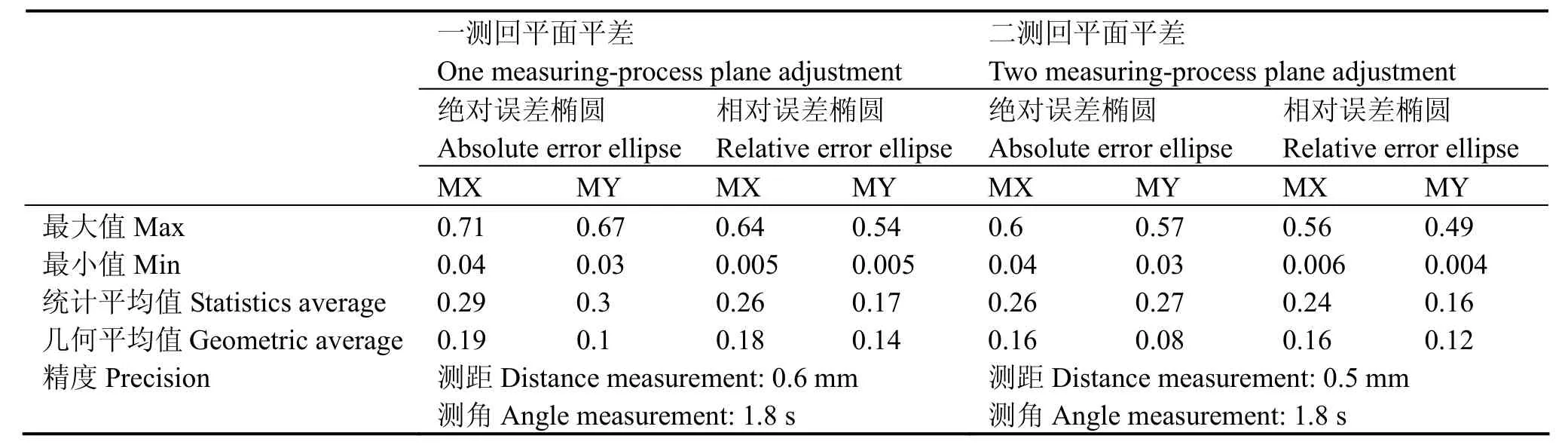
表4 储存环北半环平面网平差精度统计(单位:mm)Table 4 Statistics (in mm) for plane control net in north half of the storage ring.
表4的测量结果较激光跟踪仪储存环测量结果差很多,但由于本身测量方案差异和仪器本身测量精度,此次测量已显示出较好测量效果。全站仪北半环测量平均邻站搭接点为8个,激光跟踪仪全环测量平均邻站搭接点为28个。全站仪平差结果坐标与激光跟踪仪结果具体差值为:X、Y方向最大差值分别为1.255和0.865 mm,最小差值都为0 mm,均值为0.474和0.254 mm,统计平均值为0.565和0.33 mm。与人工照准大地四边形测量结果有一定差距,主要因为人工照准大地四边形测量方案为测距15次平均值,4测回边角测量,并在预处理中将粗差数据剔除和削若,这都是提高测量精度的有效保证。
最后,二测回平均观测值比一测回平均观测值的平差结果好,说明适当多测回测量可在一定程度上提高精度。
3 结论
通过工业全站仪在BEPCII储存环测量中应用和一系列实验研究,得出以下结论和建议:(1) 通过22.225 mm跟踪反射镜若干实验和光学目标ATR1准直差改正,使工业全站仪ATR测量能较好满足BEPCII工程需要,不但减少人工照准,也提高了作业效率和测量精度;(2) 人工瞄准全站仪大地四边形测量显示出较好精度,可满足BEPCII工程需要;(3) ATR二测回平面平差结果明显优于一测回,人工瞄准四测回又优于二测回测量,表明适量多测回测量可提升测量精度;(4) 方案上,全站仪储存环测量与跟踪仪储存环测量在相邻站搭接点个数有差距,全站仪测量平均在8个,激光跟踪仪平均在28个,故从测量方案上可进一步提升全站仪测量结果精度;(5) 在全站仪BEPCII储存环北半环现场测量中,并未对其观测数据进行一定的粗差剔除。希在储存环测量中检验角度距离测量限差,并对相关测回和测站重测,这比事后数据预处理中剔除出差要好很多。
因此,工业全站仪在BEPCII储存环测量中起一定作用,尤其在长距离测量及全自动测量方面有独特优点,都需进一步研究。
1 王国峰. 城市勘测, 2008, (1): 112 WANG Guofeng. Urban Geotech Invest Surv, 2008, (1):112
2 Leica TPS-System 1000 System User Manul. 2003
3 邓 标, 黄 腾, 陈建华, 等. 水电自动化与大坝监测,2006, 30(6): 57–60 DENG Biao, HUANG Teng, CHEN Jianhua, et al.Hydropower Autom Monit, 2006, 30(6): 57–60
4 黄 腾, 陈光保, 张书丰. 水电自动化与大坝监测, 2004,28(3): 37–40 HUANG Teng, CHEN Guangbao, ZHANG Shufeng.Hydropower Autom Monit, 2004, 28(3): 37–40
5 张正禄, 李广云, 潘国荣, 等. 工程测量学. 武汉: 武汉大学出版社, 2005 ZHANG Zhenglu, LI Guangyun, PAN Guorong, et al.The engineering surveying. Wuhan: Wuhan University Press, 2005
Application of TDA5005 industrial total station at BEPCII
LUO Tao DONG Lan LI Bo WANG Xiaolong MEN Linlin
(Institute of High Energy Physics, Chinese Academy of Sciences, Beijing 100049, China)
For reconstruction of the Beijing Electron Positron Collider (BEPCII), performance of the industrial total station Leica TDA 5005 was combined with technical requirements of BEPCII. The control points and instruments reference points of the storage ring were measured repeatedly. In this paper, we analyze the accuracy and reliability of automatic target recognition (ATR) measurement with TDA5005, and discuss the feasibility of applying it in the accelerator alignment measurement. The results can be of help in this kind of applications in alignment measurements of similar accelerators.
BEPCII, Industrial total station, TDA 5005, ATR
P2
罗 涛,男,1985年出生,2009年于武汉大学测绘学院获大地测量学与工程测量专业硕士学位,助理工程师,主要做加速器准直测量工作
2010-06-18,
2010-07-21
CLCP2
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
兰州理工大学学报(2022年5期)2022-11-07 08:24:22
湖北民族大学学报(自然科学版)(2021年2期)2021-01-15 03:35:31
北京测绘(2020年12期)2020-12-29 01:37:18
环境技术(2020年1期)2020-03-06 11:41:02
工程与建设(2019年3期)2019-10-10 01:40:18
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
电测与仪表(2016年9期)2016-04-12 00:29:52
纯粹数学与应用数学(2015年1期)2015-10-14 02:15:44