
图像分割方法在包装缺陷检测分析中的应用
2010-09-08 03:27:28王彩霞何文华
中国新技术新产品 2010年10期
王彩霞 何文华 杨 威
(1、西安航空技术高等专科学校,陕西 西安 710077 2、西安巨丰智能科技有限公司,陕西 西安710075)
引言
在一般企业中依靠普通的检测设备可以准确检测出的最小缺陷的面积为0.2mm2,而对于划痕、气泡、斩型不良,印偏等0.02mm2以内的缺陷,以及对镀铝、烫印、镭射等特殊光学特性产品的质量检测普遍还存在一定的问题。造成用户在即将完成包装时,可能发现有上述缺陷问题,经常会退单、返单,追究经济责任等。针对这些情况,与中粮包装合作,寻找一些高速在线检测的方法,以提高包装的质量和效率。要很好地检测这些特有的缺陷,只有可能在软件算法和光学系统设计两方面进行突破。本文仅论述我们从图像分割的角度入手,对问题进行的分析、处理。
1 基本思路
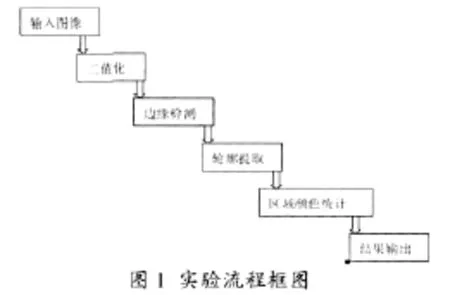
我们采用的彩色图像的边缘检测方法,主要是基于内容的图像检测系统的彩色图像分割。它利用图像的边缘,确定区域的空间范围,在空间范围的基础上,统计该空间的区域内RGB3 分量的波动,并最终形成图像分割依据。流程框图如下:
2 图像分割过程分析
彩色图像分割是数字图像处理中一种广泛应用的技术。彩色图像分割与灰度图像分割的算法相比,大部分算法在分割思想上是一致的,都是基于像素数值的相似性和空间的接近性。彩色图像分割只是在对像素属性的考察以及特征提取由一维空间转向多维空间。这是由于灰度图像和彩色图像对每一个像素的描述不同,前者是在一维亮度空间上,而后者是在三维颜色空间上。
2.1 边缘检测方法的选择
图像的边缘检测是图像处理和识别的主要内容之一,一幅图像识别的主要信息来自于它的边缘轮廓。有研究表明,彩色图像中大约90%边缘与灰度图像中的边缘相同。因此,无论是彩色图像还是灰度图像,边缘检测方法的实质是相同的,都是通过建立一个图像函数,对图像中的所有像素从左到右,从上到下进行扫描,在某一局部范围内,函数值最大的点则被认为是边缘点。彩色图像与灰度图像的不同之处在于彩色图像能够提供更多的边缘信息,除了可以利用灰度的梯度外,还可以利用颜色梯度以及纹理信息建立图像函数来判断边缘部分。常用的边缘检测方法有:1)Sobel、Laplacian、Robert 等算子分别作用于R、G、B 三个通道,再把运算结果以某种方式组合起来,如:取三个结果的平方和的平方根、或绝对值中的最大值、绝对值之和等。用这种方法检测到彩色图像边缘,易引起图像色调的变化,并且抗噪音能力较弱。2)向量空间方法:其主要思想是将图像中的每一个像素看成是RGB 空间中的一个三维向量,那么整幅彩色图像就被认为是一个二维三分量的向量场。3)颜色空间方法:就是把彩色图像映射到超复数空间,在空间中对彩色图像进行变换运算,把色彩变化比较大的区域映射为彩色区域,而色彩变化较为平和的区域映射为灰色区域,这样就可以实现彩色分量的分离。这种方法适用于颜色变化明显的图像。
经过分析对比,我们选择了具有最优边缘检测所需的特性的Canny 边缘检测算法。它具有好的信噪比,即将非边缘点判为边缘点的概率较低,将边缘点判为非边缘点的概率也低。其次,具有好的定位性,即检测出的边缘点尽可能地在实际边缘的中心。
2.2 轮廓特征提取
轮廓提取就是掏空内部点。如果原图中一点为黑色,且它的8 个相邻点都是黑色时,则将该点排除。虽然我们处理的是二值图,但实际是256 级灰度图,也只用到了0 和255两种颜色。
这样一个二值图像闭合边界的轮廓确定就可以首先按从上到下,由左到右的顺序搜索,找到第一个黑色点一定是最左边的边界点,记为A。它的右、右下、下、左下四个相邻点中至少有一个是边界点,记为B。从B 再开始找,按右、右下、下、左下、左、左上、上、右上的顺序找相邻点中的边界点C。如果C 点就是A 点,则表明已经转一圈,程序结束。否则,从C 点继续找,直到找到A 点为止。这样,就很容易找到边界点,如果它的上下左右四个相邻点都是黑色,则不是边界点。否则,即是边界点。
2.3 区域颜色统计与合并
利用前面得到的边缘信息,对每一个边缘包含的局部区域,提取其在原图中的点的信息,进行颜色统计。将灰度相同的点的信息检测其RGB 值,如果RGB 值范围相当,则把这些点放在一起,统计一个RGB 范围值,然后用这个范围值给对应的边缘包含的局部区域赋值,使相邻的两部分的RGB 值不同。这样,统计区域中所有点的RGB 值。
做好区域颜色统计,对灰度值相等的图像区域的每一个RGB 分块进行统计,RGB 值范围相同的放在一起给其赋一个新范围值,这样就完成了颜色区域的合并,避免重复劳动,提高了检索效率。
3 实验结果分析
在实验过程中,我们也发现Canny 算子对于一幅包含模糊边缘的图像,如果选择大尺寸的滤波器,虽然能检测出模糊边缘的位置,但得到的边缘往往偏离其所在实际位置。所以在能检测出边缘的前提下,Canny 算子应尽可能选择尺度较小的滤波器,但尺度小的滤波器的抗噪音性能又较差。可见,各种算法没有最好的,只有相对方便、适用的。
对于图像噪音,我们先对输入图像进行高斯滤波,除去图像中的噪音并且对图像进行平滑处理。然后再利用边界强度的变化对图像进行粗分,粗分得到的每块区域具有基本一致的颜色和较明晰的轮廓。再就各个定义块之间的关系函数,进行权重矩阵计算,将粗分结果转化成向量图,最后对图进行递归二分切割。
4 结论
本试验采取首先对一幅图像提取其边缘信息,利用边缘跟踪获得图像的基本框架,在得到框架以后,只须对框架的颜色进行比较,就可以快速分析出图像位置,帮助检测系统作出有无缺陷的判断。改变了以往的由颜色来确定区域的模式,并减少了噪音对图像的干扰,解决了颜色对比精度不高带来的问题。
[1]史婷婷.基于内容的图像检索方法研究与实现[D].2007 2;10-11;35-36;
[2]L Yang and F.Algregtsen.Fast Computation of Invariant Geimetric Moments:
A New Method Giving Correct Results[C[,Proe.IEEE Int.conf.On Image Processing,1994
[3]刘禾.数字图像处理及应用[M].北京:中国电力出版社,2005.
[4]龚声榕,刘纯平,王强等.数字图像处理与分析[M].北京:清华大学出版社,2006.7
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
测绘学报(2021年11期)2021-12-09 03:13:12
激光技术(2021年5期)2021-08-17 03:36:02
高技术通讯(2021年3期)2021-06-09 06:57:48
电子制作(2019年16期)2019-09-27 09:34:46
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
东北电力大学学报(2015年1期)2015-11-13 05:20:36
电脑与电信(2014年6期)2014-03-22 13:21:06
电子设计工程(2014年18期)2014-02-27 12:00:31
