隧道工程施工中GPS 测量技术的应用探讨
2010-09-07 06:28李贵兵
中国新技术新产品 2010年5期
李贵兵
(贵州省有色地质勘查局二总队,贵州 六盘水 553004)
1 GPS隧道控制测量
1.1 工程概况
该隧道是某高速公路的重要工程,它包含两个隧道,一号和二号,长度分别为1270m 和640m,设计高度为7.8m。测区植被覆盖高、森林茂密。
1.2 布网设计
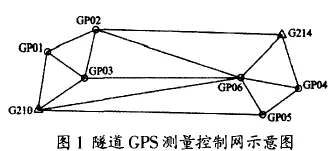
在隧道的两端,各有一个高等级的GPS已知点。G210,G214,为保证施工期间对洞口控制点的稳定性进行常规检测。进出口各设了3个GPS 控 制 点 ,GP01、GP02、GP03、GP04、GP05、GP06,其中GP03、GP06 分别是进洞与出洞桩。
1.3 GPS的外业观测
实际作业中采用4台AshtechZ-Xtreme 接收机按照静态测量的方法进行。观测严格执行调度计划,按规定时间进行同步观测。在进行GPS观测时,应注意以下几点。
1.3.1 根据卫星可见性预报,优选最佳观测时段进行GPS观测。
1.3.2 天线的对中精度为1mm,标志线指北误差≤±5°,以减弱相位中心偏差的影响。
1.3.3 天线高在观测时段前后,从3个方向分别量取,误差≤2mm,采用算术平均值。
1.3.4 卫星高度截止角≥15°,PDOP 值<4,接收卫星数>5。
1.3.5 为确保控制网实测精度,每个时段观测时间均大于90min。
1.3.6 观测时,不要在天线附近使用对讲机或移动电话,以减少信号干扰。
1.4 GPS测量的数据处理与精度分析
在外业取得了合格的数据以后,采用AshtechSo-lutions2.60 英文版软件进行基线解算及控制网的平差。
1.4.1 基线处理
剔除记录时间短于10min 及出现周跳部分的卫星数据,进行基线解算:
①同步环闭合差根据自行处理后的基线向量结果,共搜索到17个同步环。相对误差最大为2.468×10-6,最小为0.479×10-6,小于允许值5×10-6。
②异步环闭合差异步环的检查至关重要,是衡量外业观测成果和GPS网内部结构质量的重要指标,它反映了GPS测量总体精度。全网共检查异步环13个,相对误差最大为2.873×10-6,最小为 1.438×10-6,小于允许值 5×10-6。
1.4.2 无约束平差
基线解算符合精度要求后调入基线数据。平差时,不输入已知点进行约束,让整个控制网在没有控制点的情况下,在WGS84 系统下进行三维无约束平差。经过平差,得到各个向量平差后的相应的改正数,改正数绝对值(V△x,V△y,V△z)应满足下式:

式中σ—相应等级基线规定精度。
在隧道控制网GPS数据解算时,无约束平差后各个基线分量中,误差最大的基线为G210-GP05, 其改正数绝对值 V△x=0.015、V△y=0.022、V△z=0.017,均小于 3σ=0.165,满足《全球定位系统(GPS)测量规范》GB/T18314-2001 中E级要求。
1.4.3 约束平差
在三维无约束平差确定限差均符合规范要求的基础上,以测区已知GPS控制点G210 和G214的坐标作为起算坐标,进行二维约束平差。约束平差后,基线分量的改正数与同一基线的无约束平差相应改正数较差的绝对值 (dV△x,dV△y,dV△z)应满足下式:

式中σ—相应等级基线规定精度。在隧道控制网GPS数据解算时,约束平差后,基线分量的改正数与同一基线的无约束平差相应改正数较差的绝对值误差最大的基线为GP02-GP06,其改正数绝对值 V△x=0.047、V△y=0.028、V△z=0.064,均小于2σ=0.524,满足《全球定位系统(GPS)测量规范》GB/T18314-2001 中E级要求。
1.4.4 GPS边长观测与全站仪边长观测的比较
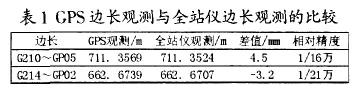
为了检验GPS接收机在隧道控制中的精度问题,利用Leica702 型号的全站仪观测3条边,将实测边长与GPS边长进行比较,结果如表1。
?
从表1 数据比较可见GPS边长观测与全站仪边长观测的数据相差很小、精度高,满足规范的要求。2条边GPS观测的相对误差为1/158 078、1/207 085,G210~GP05 边的相对误差大些。这是因为GP05 周围反射物较多,卫星接收信号没有G214、GP02 接收信号好,造成长边反而误差大的现象,故在选点时要注意选开阔的地方,减小多路径效应对GPS信号接收的影响。
2 GPS隧道控制网选点要求
为确保GPS观测质量,提高工作效率,方便施工测量,隧道GPS控制网选点时应注意以下几点。
2.1 为了后续施工放样的检核和控制点稳定性的检验,应保证每个洞口至少有3个控制点,每个洞口两相邻点间的距离保证在300~500m之间,且要相互通视,以便常规测量仪器的施工放样。
2.2 由于隧道多位于山区,地面上各点的垂线是不平行的,重力水准面并不是一个规则的曲面,法线与垂线不一致,存在一个垂线偏差β。所以控制点位应尽量等高、等距布设,以减弱观测调焦和垂线偏差对进洞连接角的影响。
2.3 控制点应尽量沿隧道轴线布置,控制点埋设要稳固,最好埋设在基岩上,以便保持长久稳定。
2.4 在GPS选点布网时,要注意避免反射现象,如池塘、河道、沙滩、山谷等地形都能构成反射现象。采取提高天线高度和其他防止措施,同时也要注意高电磁物体的影响,尽量远离高电磁物体以减小电磁波对GPS接收信号的干扰。
3 GPS控制网网型设计
3.1 隧道GPS网一般应通过独立基线构成闭合图形,所有控制点均由同步环或异步环相联,并组成空间三角形和空间大地四边形以加强网的几何结构强度。网中不应存在自由基线(自由基线不具备发现粗差的能力),某一闭合条件中的基线数不可过多,避免导致各边粗差在求闭合差时相互抵消,不能起到发现粗差的作用。
3.2 网中各点最好至少应通过3条独立基线,以保证检核条件,提高网的可靠性,使网的精度、可靠性较均匀。每个控制点应独立观测至少两个时段。
3.3 在GPS网的观测方案设计中,应考虑最佳观测时段,考虑到同时能接收5颗以上卫星的信号的观测时段。衡量观测时段好坏的标准是精度衰减因子(DOP)值,对于静态定位来说主要是几何精度衰减因子GDOP的大小,GDOP 值一般应小于4,应避免在某一时段出现GDOP 陡然变化的情况。
4 结束语
通过使用GPS和对该网的精度分析,我们认为GPS网布设方案科学,平差精度优异,无论同步环、异步环、三维无约束平差、约束平差、边长观测的精度都优于规范的规定。隧道贯通后,估算与实测贯通相差7mm,从而进一步证明了GPS隧道测量的可信度。由此得知GPS隧道控制网能满足隧道贯通精度的要求。
[1]徐昭铨,张华海,杨志强等,GPS测量原理及应用[M].
[2]关宝树,隧道工程施工要点集,人民交通出版社.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
小学生学习指导(中年级)(2021年10期)2021-11-01
数学小灵通·3-4年级(2017年12期)2018-01-23
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
测绘技术装备(2015年3期)2015-10-14
中学数学杂志(高中版)(2015年3期)2015-05-28
全球定位系统(2015年4期)2015-02-28