GPS在架空送电线路测量中的应用研究
2010-08-30 06:11雷志
科技传播 2010年22期
雷 志
浙江华隆岩土工程有限公司,浙江杭州 310014
GPS系统包括3大部分:空间部分——GPS卫星星座,地面控制部分——地面控制系统,用户设备部分——GPS信号接收机。我们在工程控制测量中常用地固坐标系统(如:WGS-84世界大地坐标系和1954年北京坐标系)。在实际使用中需要根据坐标系统间的转换参数进行坐标系统的变换,来求出所使用的坐标系统的坐标。这样更方便的表达地面测量点的位置和处理处理GPS观测成果,因此在测量中被得到了广泛的应用。
1 静态测量
静态测量就是用GPS的静态测量测量像控点的坐标,对航带进行纠正注入坐标。
1.1 静态相对定位的原理
静态相对定位是用两台接收机分别安置在基线的两端,同步观测相同的GPS卫星,以确定基线端点的相对位置或基线向量。同样,多台接收机安置在若干条基线的端点,通过同步观测GPS卫星可以确定多条基线向量。在一个端点坐标已知的情况下,可以用基线向量推求另一待定点的坐标。
1.2 电力线路航带静态测量的网型
电力线路的外控点的连接一般采用线状连接叶状发散的网型而不是采用一般大地测量的三角网连接。作业方法:在测区中部选择一个基准站,并安置一台GPS接收机固定连续跟踪所有可见卫星;另几台GPS接收机围绕基准站到各像控点设站。比如C1、C2、C3……为基站点,k0101、k0102、 k0103……像控点围绕C1;k0201、k0202……像控点围绕C2……。C1,C2,C3……线状连接,相控点与基站点叶状连接。
1.3 像控点的布设要求及基线精度
像控点在布网要求下选择明显地物的明显交叉点作为像控点。像控点视情况观测十几分钟到半个小时。两台GPS接收机的基线长度不超过10km。精度:流动站相对于基准站的基线中误差为5mm+1ppm*D。
1.4 控制点的联测及静态数据的输出处理
当测区内有GPS永久性跟踪站、国家A或B级网点、GPS地壳形变监测点时,应首先选用作参考站点。为了检验当前作业的正确性,必须检查一个点以上的已知控制点,当检核结果在设计限差要求范围内时,方可确认基线计算的准确性。数据的计算可采用Trimble Geomatics Office(TGO)软件进行。平差后的数据应满足精度的要求,计算的结果应选择适当的坐标系统输出。
2 动态测量
2.1 RTK技术的原理及测量精度
动态测量就是各种专业的人员实地决定下电力线路的路径铁塔的中心位置等,测量人员的工作就是测量下塔位中心和危险断面三维坐标,塔位处的地形情况等,校核航切平面断面图为设计服务。我们应用GPS的RTK技术和全站仪进行测量
载波相位差分技术(RTK)是实时处理两个测站载波相位观测值的差分方法。载波相位差分法分为两类:一类是修正法,另一类是差分法。
从RTK硬件设备特性和观测精度、可靠性及可利用性综合考虑,现阶段RTK的测量技术要求如下表:
RTK技术当前的测量精度(RMS)
平面 10mm+2ppm;
高程 20mm+2ppm。
所以RTK测量可用于的测量工作,RTK技术可用于四等以下控制测量、工程测量的工作。
2.2 RTK测量准备
由于RTK数据链的传播限制和定位精度要求,RTK测量一般不超过10km。但在中小比例尺测图时,在等高距大于2m时,可将测距放宽至不大于15km。当等高距小于2m时,应不大于10km。但要注意下列要求:
1)GPS接收机的性能要高,且机内有先进的数学模型,能确保长基线进行正确整周未知数的求解;
2)数据链的性能要好,传送距离要远,能正确无误的将参考站的数据发送到流动站;
3)根据无线电传播的规律,参考站和流动站离地面要有一定的高差;
4)参考站和流动站之间必须没有山体、楼群之类的遮挡;另外,作业区域内还不能存在强烈的电磁波等干扰。
发射距离与电台天线的高度也有关系。由于参考站电台天线发射UHF波段差分信号电波,天线的高度对RTK测量距离影响很大,天线高与作用距离服从于下列公式:

式中I1和 I2 分别是基准站和流动站电台的天线高,单位为米;D为数据链的覆盖范围的半径,单位为公里。上式是在无障碍物遮挡和无电波干扰的理想条件下的覆盖范围,实际应用中将会有所出入。
实际工作中数据链的覆盖范围的半径根据地形的不同山区大概最短只有2km平地最长可达到6km。所以根据测区大小,地形情况可设置不同的发射天线高度和选择适宜的地点架设基站。
2.3 线路设计测量(放样测量)的实施
从RTK硬件设备特性和观测精度、可靠性及可利用性综合考虑,现阶段RTK的测量技术要求如表1。
3 结论
在测量行业飞速发展的今天,GPS技术更新迅速,因而其应用范围也日益广泛。随着测量中GPS技术的发展,相信未来在电力系统领域中的应用,必定会更上一层楼。
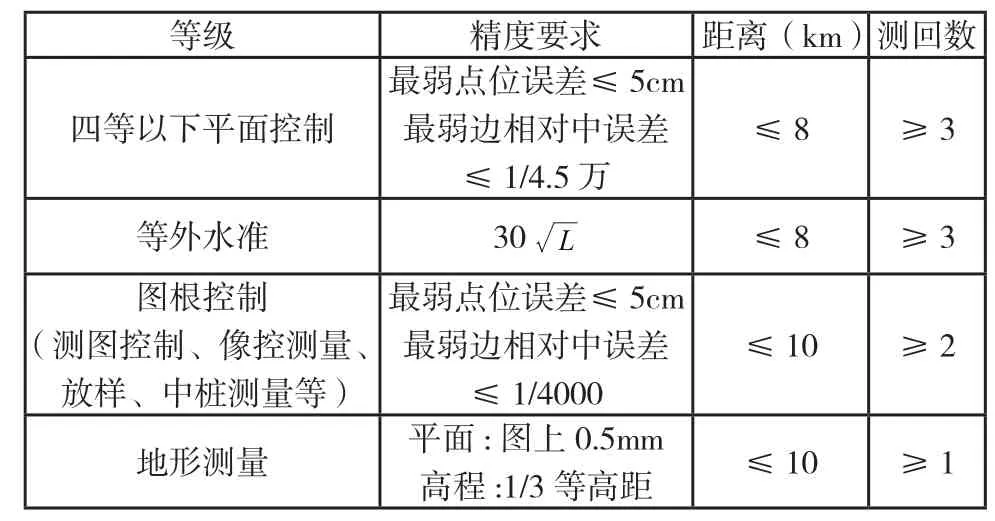
表1 RTK测量技术设计要求
[1]党安荣,王晓栋,等.ERDAS IMAGINE遥感图像处理方法[M].清华大学出版社,2003.
[2]杨晓明,游晓斌.IKONOS图像纠正的实验研究[J].北京林业大学学报,2003,25(特刊).
[3]熊轶群.IKONOS-2卫星影像纠正及精度分析[J].北京测绘,2004(1).
猜你喜欢
中国港湾建设(2023年12期)2023-12-27
科学导报(2023年84期)2023-12-17
军民两用技术与产品(2021年10期)2021-03-16
中国交通信息化(2020年7期)2021-01-14
北京航空航天大学学报(2019年9期)2019-10-26
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24