
巷道平移式立体车库结构和控制系统设计
2010-08-23 08:33:24梁秀英段成财李庆伟
制造业自动化 2010年2期
梁秀英,段成财,李庆伟
LIANG Xiu-ying, DUAN Cheng-cai, LI Qing-wei
(华中农业大学 工程技术学院,武汉 430070)
0 引言
近年来,随着国民经济的增长和汽车工业的发展,我国汽车的使用量大幅上升,汽车泊位与汽车数量的比例严重失调,城市中停车难、违章停车的矛盾越来越尖锐[1~3]。针对这一现状,向空中和地下发展的立体车库成为现代泊车的必然选择。立体车库提高了土地使用率,实现了停车过程中人车分流,从而保障了人身安全。根据结构形式的不同,立体车库可分为升降横移式、平面移动式、巷道堆垛式、垂直升降式、简易升降式等多种形式[4]。本文提出的巷道平移式立体车库,结合了巷道堆垛类的大容量和平面移动类的高效率等优点。本文设计了巷道平移式立体车库的机械结构和控制系统。
1 系统结构及工作原理
1.1 系统结构
立体车库的机械部分主要由移动平台和车位组成,移动平台的作用是实现车辆在X、Y、Z方向的移动,其中X轴方向的运动主要是由横移机构和微横移机构来完成,主要包括电机、减速器、传动轴、横移链轮、推拉销、联轴器、驱动齿轮以及齿条等部分组成;Y轴方向的运动由驱动轮和导轨来完成,主要包括电机、减速器、主动和从动链轮、传动链条、传动轴、驱动轮以及平行导轨等部分组成;Z轴方向运动由钢丝绳带动提升架来完成,主要包括电机、减速器、联轴器、钢丝滚筒、钢丝绳、定滑轮和提升轿厢等部分组成。车位的功能是存放载车板,一般包括两层或多层,主要结构是型钢联接成的钢架,此外还包括保险钩和承载滚道等一系列辅助部件。立体车库的总体布局如图1所示。
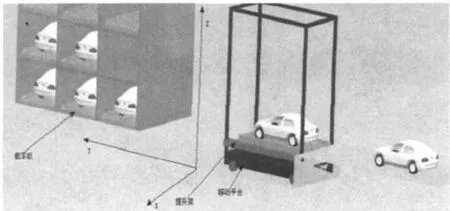
图1 立体车库的总体布局图
1.2 工作原理
1.2.1 存车
当按下存车按钮并选择车位后,移动平台就会在电机的驱动下沿着轨道进行Y方向的运动,移动平台到位后提升电机开始正转,提升架向上沿Z方向运动,提升架到位后驱动微横移电机开始反转,带动微横移机构沿X负方向动作,微横移机构到位后横移电机开始正转,推拉销在横移链轮的带动下由链轮的一端开始进行圆周运动,在这个运动过程中推拉销实现了向Z轴正方向的运动,并实现了与推拉钩的啮合。推拉销运动到链轮顶端后开始做水平运动并带动推拉钩和载车板X轴正向运动,到位后驱动提升电机反方向运动,提升轿厢沿Z轴向下运动,到位后平台驱动电机反转,实现Y轴负向运动,运动到位后电机停转,实现了载车板的取出。
车停到载车板后,若车的长宽高满足系统要求,则开始存车,否则发出报警信号。存车系统按照上述顺序进行Y向和Z向运动,Z向到位后微横移电机开始反转,载车板在微横移机构的带动下进行X负方向移动;到位后微横移电机开始反转,载车板在微横移机构的带动下继续向前运动,当推拉销运动到链轮端点时推拉销和推拉钩自动脱离,与此同时保险钩的作用端在弹簧的拉力下向上翘起,起到保险作用。
存车完成后,微横移机构开始运动,到位后停止运动,然后再进行Z方向和Y方向的运动,最终回到原位,完成存车过程。车位、推拉销啮合、载车板的示意图如图2所示。

图2 车位、推拉销啮合、载车板示意图
1.2.2 取车
当按下取车按钮并选择车位后,移动平台就先按照上述步骤先进行Y轴正向运动,在进行Z轴正向运、X轴负向运动,推拉销和推拉钩啮合后进行X轴正向运动、Z轴负向运动、Y轴负向运动,最终回到原位,实现车辆的取出。
2 控制系统设计
2.1 硬件设计
巷道平移式立体车库控制系统按3层设计,每层3个库位,分南北两区,中间为移动平台。其硬件结构框图如图3所示。其中存取车界面如图4所示,采用与车位相对应的指示灯来提示车位是否有车,即每个车位的状态指示灯显示了当前该车位是否有车,如果已停车则该指示灯为亮,此时只能取车不能停车,反之,若该指示灯为灭的状态,则可以存车;根据输入输出点数和存储容量的要求,本系统的控制器选择三菱FX2 N-80MT-D型PLC,具有40点输入/40点晶体管输出,存储容量为8000步;传感器有距离和位置传感器两类,距离传感器是判断移动平台何时到达指定的位置,即控制X、Y和Z轴的位置,根据不同的检测方式可以用不同的传感器,在这里经过综合比较选择最为普遍且能达到精度的 L5XCMN 2112 L 1型行程开关,位置传感器是用来控制车长和车高,不让其超过载车盘的极限位置[5],选用三易电气公司生产的型号为JCG-1650 D 03NO的常开型光电接近开关,安装在升降平台上;PLC输入接口电路主要是采用光电耦合器把传感器的输出信号耦合到PLC的输入口,而PLC输出接口电路则采用固态继电器(S S R)去控制执行电机动作;另外当所存车的高度超过了车库所规定的高度时就发出报警信号。
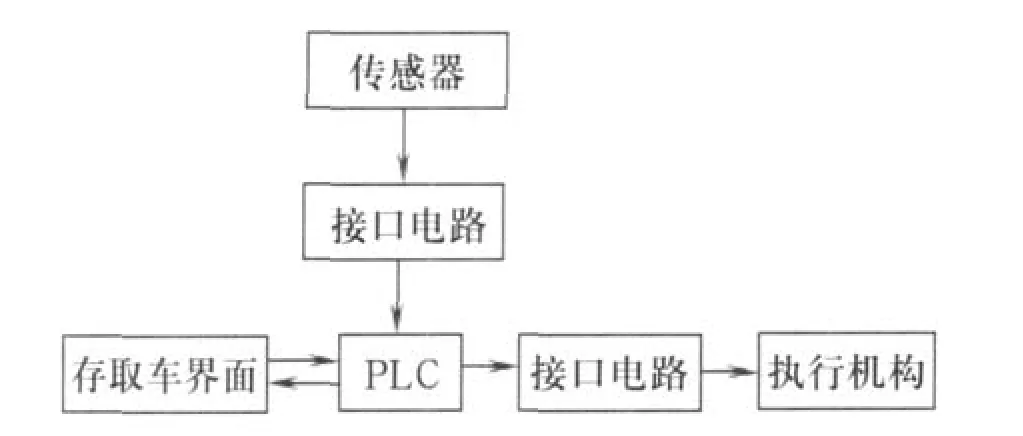
图3 立体车库硬件结构框图

图4 存取车控制界面
2.2 软件设计
本立体车库控制系统采用手动操作和自动操作两部分,手动操作主要用于车库设备的安装调试、维修和故障处理,自动操作为车库正常运行时使用,两套系统互不影响[1]。自动操作的软件流程图如图5所示。
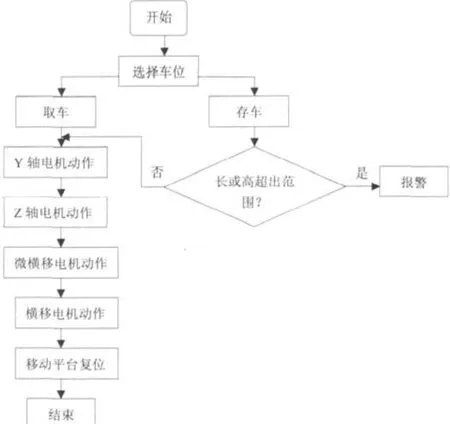
图5 自动操作的软件流程图
3 结论
在现有的多种自动化立体车库的基础之上,提出了一种新的设计思路,融合了平面移动类和巷道堆垛类两种车库的设计方法,既实现了Y轴方向的移动,增加存车容量,又能够实现X方向的水平无搬运平移;控制系统采用限位开关和光电接近开关,不但控制精度高而且使整个控制系统的输入、输出接口电路接线简单、方便,运行稳定、可靠;硬件和软件设计中充分考虑车库容量的问题,只需要很小的修改就能实现车库容量的改变。
[1]张华强,王陶,苏晓良,等.基于H MI和PLC的立体车库自动控制系统[J].电气传动,2005,35(8):50-53.
[2]王雪洁,王国雄.PLC与变频器在巷道堆垛式立体车库控制系统中的应用[J].起重运输机械,2005,(2):19-20.
[3]姚小明,白晨明,范多旺,等.巷道堆垛式自动化立体车库监控系统[J].电气传动,2005,35(11):41-44.
[4]李祥启.立体车库的选型与应用[J].建设科技,2008,(10):66-67.
[5]马幼捷,张海涛,周雪松,等.多层循环式立体车库控制核心的研究——从PLC到D S P的升级[J].制造业自动化,2009,31(5):9-13.
猜你喜欢
工程科学与技术(2023年5期)2023-10-12 03:05:22
铁路通信信号工程技术(2022年12期)2022-12-26 12:29:44
物流技术与应用(2021年11期)2021-12-27 05:17:20
铁道标准设计(2020年12期)2020-12-23 01:54:32
黑龙江交通科技(2020年3期)2020-05-13 13:02:52
制造业自动化(2018年10期)2018-11-02 09:51:40
电子制作(2017年2期)2017-05-17 03:54:53
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:45
汽车零部件(2014年10期)2014-11-11 12:25:06
河南科技(2014年8期)2014-02-27 14:07:59
