
Radarsat-2全极化SAR车辆目标典型方位特性分析
2010-08-21 12:38汤益先
电波科学学报 2010年6期
张 波 王 超 张 红 吴 樊 汤益先
(中国科学院数字地球科学重点实验室,中国科学院对地观测与数字地球科学中心,北京 100094)
1.引 言
2007年以来,COSMO-Sky Med,TerraSAR-X,Radarsat-2等可获取全极化10米级分辨率的新型SAR卫星发射成功与数据稳定获取,为星载SAR影像的应用开辟了新的应用方向[1-2]。围绕地面车辆目标、飞机目标的检测和特性分析,德国航天局(DLR)与加拿大遥感中心(CCRS)在这些新型卫星发射之前,已开始利用机载实验数据进行系统的研究与实验[3-7]。针对飞机残骸的检测,Tom I提出了基于单景机载全极化SAR影像的PWF(Polarimetric Whitening Filter,PWF)恒虚警检测、Cameron极化分解、偶次反射分析以及基于多景影像相干分析的联合检测验证方法,并进行了无场景约束条件下的飞机残骸目标检测实验[3]。德国航天局在“TRAMRAD项目”支持下进行基于星载雷达的自动、大范围、非合作车辆目标交通监测系统的构建方案研究[4]。在“交通信息处理机(Traffic Processor)”项目的支持下,德国航天局配合地面多种小型机动车辆如:高尔夫、奥迪等,进行了多次机载SAR飞行实验,重点研究车辆目标随目标方位、入射角度、传感器波段等条件变化下的目标特征变化规律[5-6]。
Radarsat-2精细全极化模式(Fine Quad-Pol)影像标称分辨率为8 m。因此,利用星载SAR影像与道路交通网的先验地理信息约束,有可能实现接近图像分辨率单元大小的静止单个车辆目标,及目标集群的检测。运动中的车辆目标在SAR成像中会造成目标成像位置偏移和模糊[7]。而对于交通监测的应用中,相比交通畅通情况,我们更为关心的是由于冰雪灾害等因素造成的交通阻塞、交通中断情况下的道路交通监控。在这种应用背景下,车辆更多地表现为慢速及静止目标。要实现车辆及车辆集群目标的检测,研究车辆目标在SAR影像中的散射特性,及与道路标识牌,道路边独立建筑等潜在车辆混淆目标的辨识方法显得尤为重要。而这一切研究的基础,即为要寻求出车辆目标在不同成像条件下的固有目标特征或变化规律。
为分析星载SAR影像中车辆目标的散射特性,本文利用Radarsat-2全极化数据进行了两种入射角条件下、同类型卡车在多个典型方位下的地面同步实验,并利用提出的目标特性分析方法,对目标的全极化特性变化规律进行了分析。
2.全极化SAR车辆目标特性分析方法
2.1 车辆目标RCS量测
雷达横截面 σ(Radar Cross Section,RCS),反映目标返回雷达能量的大小。当目标具有非常简单的外形(如:球)时,σ明显与波长相关。当目标为球体以外的其他形状时,σ在很大程度上取决于目标相对于雷达波束的视角[8]。针对复杂目标,如车辆,σ常需要考虑的具体因素及各参数的物理意义见表1[5-6]。其数学表达为式(1)

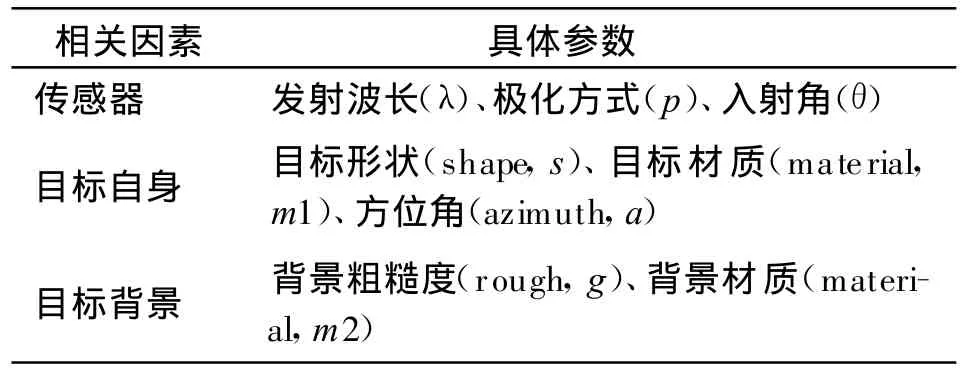
表1 影响RCS大小的相关因素
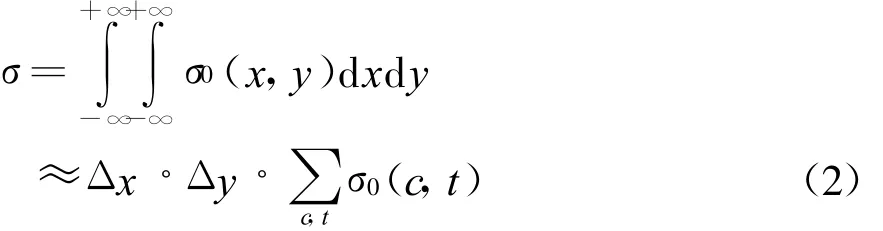
星载Radarsat-2影像中,提供了影像辐射定标查找表(look up table),利用表中提供的纠正参数,可以将Radarsat-2影像纠正到σ0值图像。σ0值反映目标在单位面积上的散射强度[8]。利用式(2)可以求得目标的σ值。
2.2 车辆目标方位测量
车辆目标与传感器间的成像几何关系,由目标方位角α和传感器入射角θ共同决定。其关系如图1所示。在观测区域内建立平面直角坐标系(x,y,z),x方向与卫星飞行方向重合,z方向与地表垂线方向重合,y方向与x,z方向组成左手坐标系。x方向与真北方向的夹角β,可以通过SAR影像元数据中的影像四个角点经纬度坐标进行反算求取。车辆目标与磁北方向的夹角可以通过地质罗盘直接测量获取,通过磁偏角改正和β角改正,可将目标方位直接归算至x方向。为便于分析计算,常设车辆目标头部朝向与x方向一致时为0°,并以顺时针方向为正,则目标方位的角度范围为[0°,360°]。以上分析中,真北方向、磁北方向、目标方位均在 x,y平面内。入射角θ,即SAR发射的单个脉冲与z轴的夹角,可以利用元数据中提供的卫星平台坐标与GPS测量的车辆目标坐标,进行基于参考椭球的局部入射角计算求取。
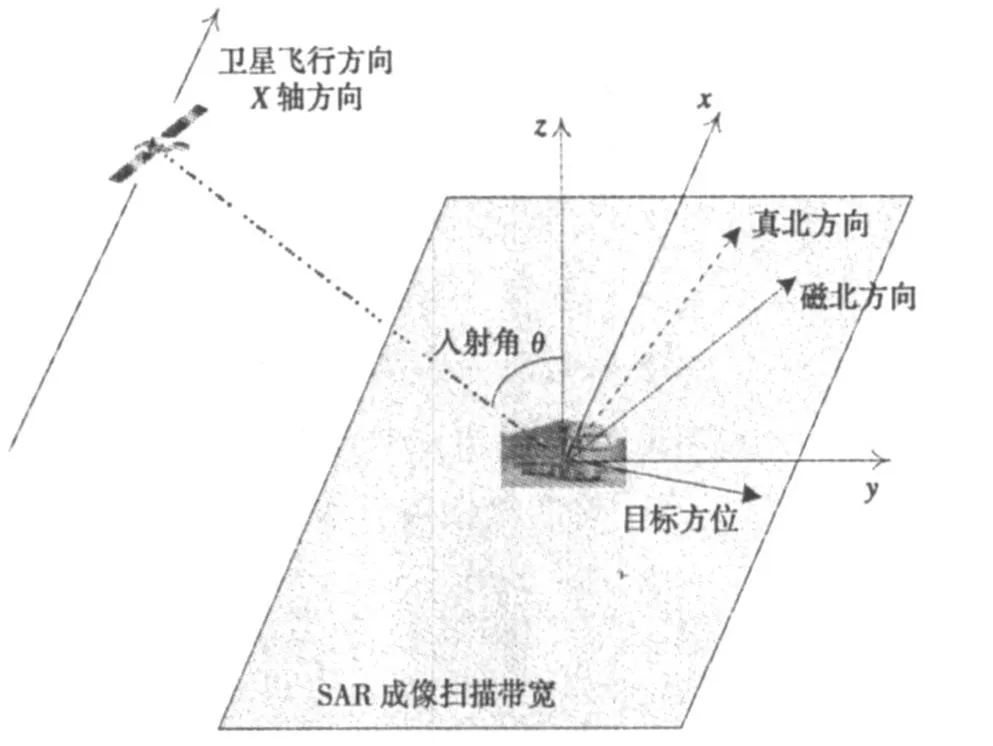
图1 SAR目标成像几何测量位置关系图
2.3 车辆目标极化分解
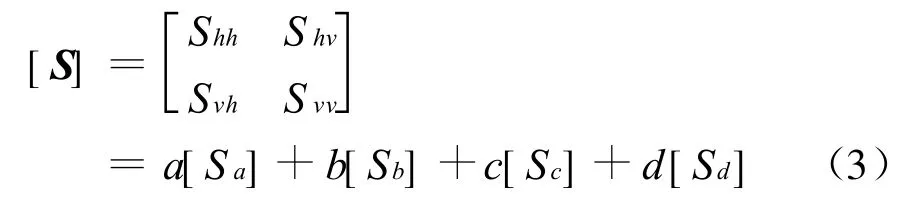
车辆目标为人工硬目标,即相干目标。其目标散射特征确定、稳态,散射回波相干。因此,可利用相干目标分解技术对车辆目标的极化散射矩阵[S]进行分解分析。车辆目标在不同方位条件下,车身与地面的二面角效应始终成立。Pauli分解基的物理解释可用二面角姿态变化予以形象解释[9]。Pauli分解选择Pauli基{Sa,Sb,Sc,Sd}作为它的散射矩阵,其前三个基的物理解释分别对应:面、球、角反射器,二面角,倾斜π/4的二面角。散射矩阵可表示成如下形式
设
当介质满足互易条件时,

Pauli分解具有保持总功率不变性,即总功率

求取图像的总功率图像,具有多视平均的效果,因此,有助于降低SAR图像中斑点噪声的影响,有利于硬目标的检测。
3.实 验
3.1 实验数据
为分析车辆目标在不同成像条件(入射角、方位姿态)下的极化散射特性,利用Radarsat-2卫星进行了两次不同入射角下的车辆目标成像。考虑车辆目标自身的对称性,选择三种姿态:平行x轴(SAR飞行方向)、垂直 x轴、以及与 x轴夹角为 45°(或225°),作为典型姿态进行重点分析。
每次实验中使用同种型号卡车3辆。为使卡车目标之间互不影响,间距保持在100 m左右。图2,图3依次为实验1、2中的车辆停放方位示意图及车辆光学照片。依据2.2节中所示的测量方法,将卫星飞行方向置为0°,依次求得车辆目标的停放方位。实验1中的车辆停放方位为 0°,225°,270°。实验2中的车辆停放方位为 180°,225°,270°。传感器、车辆目标、背景的参数信息列于表2中。实验1中的道路为火车客运专线未铺设铁轨的路基,路宽13 m,路两侧施工用料偶有堆积,房屋、树木较多,道路情况可见图2中光学照片。实验2中的道路为已修好但尚未正式通车的城市主干线,路中有道路隔离带,路宽24 m,道路情况可见图3中的光学照片。
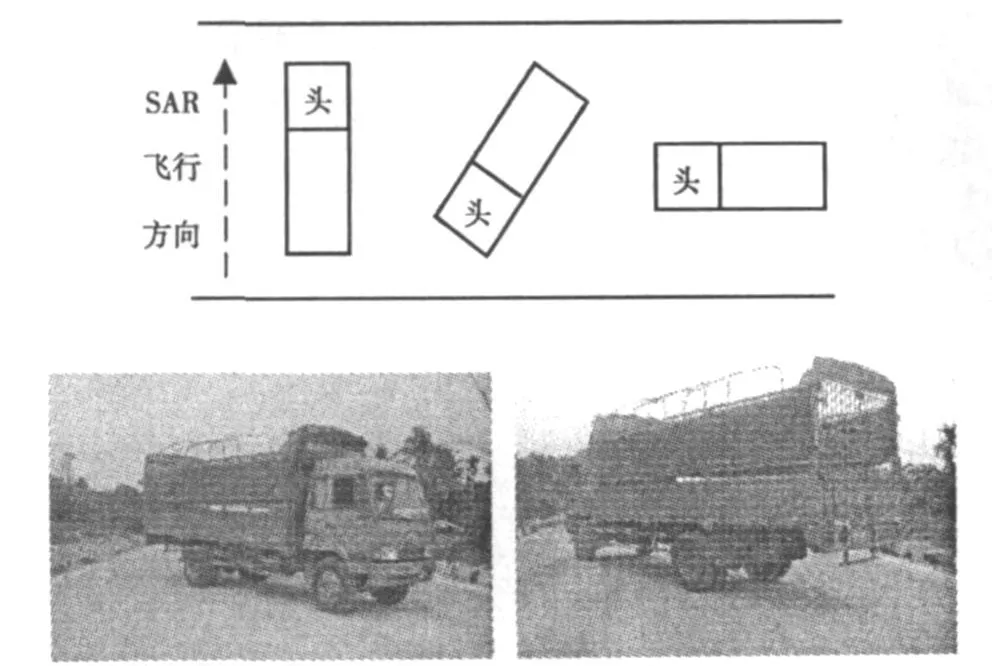
图2 实验1中车辆0°,225°,270°分布示意图,车辆与道路背景照片
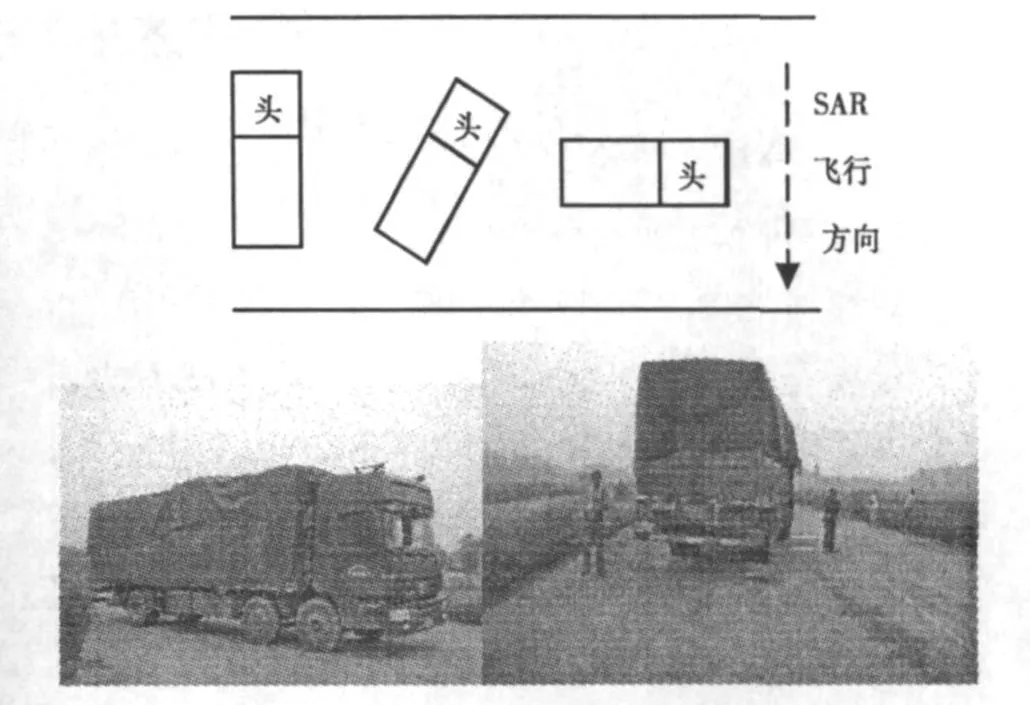
图 3 实验 2中车辆 180°,225°,270°分布示意图,车辆与道路背景照片
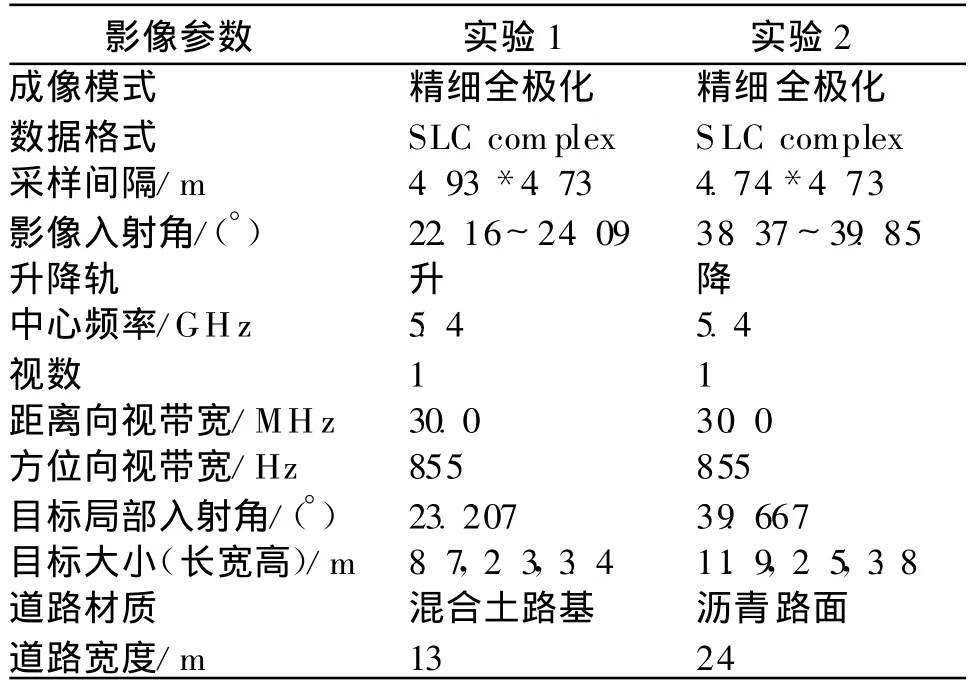
表2 Radarsat-2实验影像具体参数
3.2 实验数据处理
首先,利用提供的查找表纠正参数,对Radarsat-2卫星影像数据进行σ0辐射纠正。为抑制SAR图像中的斑噪影响,对实验图像求取其总功率图(Span image)。按照图像分辨率及车辆目标大小,依据GPS获取的地理坐标,选取以车辆目标所处位置为中心的9×9像素窗口为研究对象,得到车辆在三种姿态下的目标σ0切片图,如图4(a)、4(b)所示。
图4(a)的图像切片中包含有道路成分(道路为东西方向),考虑道路宽度,切片上下各3个像素为道路两旁的地物杂波。图4(b)中的道路旁多为农田,图像切片中除目标外均为道路背景。在图像切片中提取中间三行,并去除确定的车辆目标(σ0>1),计算道路背景的σ0得知:实验1中的道路σ0均值为0.1202,方差为0.0146。实验2中的道路σ0均值为0.2796,方差为0.0496。
利用Pauli极化分解算法,对各姿态下的目标切片进行分解。各极化分量(图像中各行依次对应hh+vv,hh-vv,2hv),及各分量的成分比见图 5(见1233)。
3.3 实验分析及讨论
3.3.1 不同入射角条件分析
观察对比图 4(a)与(b)可知,对于 225°、270°相同方位姿态下的车辆目标,39.7°入射角条件下的σ0值是23.2°入射角条件下值的4倍以上。对于0°,180°,考虑目标对称性,可认为他们是同方位姿态下的目标,39.7°入射角较23.2°入射角虽然最大值接近相同,但大入射角条件下,车辆目标表现出更多的图像目标像素。这与SAR的侧视成像原理相一致。
3.3.2 不同目标方位条件分析
在同一入射角条件下,依据车辆目标对称性(即0°与 180°相同 ,45°与 135°相似),对三种典型姿态下的卡车目标成像结果进行分析。由图4分析可知:卡车车辆在0°与180°方位姿态条件下可取得最大σ0 值,在 90°与 270°方位姿态下 σ0 值最小 ,45°与135°介于两者之间。
由图5各极化成分比可以看出,目标在0°与180°,270°方位姿态条件下,偶次散射所占比重最为显著,这由实际成像机制所决定(车辆与地面构成二面角)。目标在225°方位姿态下三种散射机制较为均衡,究其原因为在此方位下,卡车正面及侧面与地面构成的二面体与SAR入射电磁波的夹角为45°,造成Pauli分解的偶次散射减弱,其他分量增加。
3.3.3 目标自身装备差异分析
同次实验使用的3个卡车型号一致,配置基本相同。但两次实验使用的卡车型号并不相同,因此,在进行两次实验间的目标特性对比分析时,须考虑卡车车辆大小,及自身配置的差异。自身配置差异主要来自于卡车车辆箱体的遮盖。其实例及几何参数可见图2、3中的光学照片及表2。
实验1中,270°姿态条件下的车辆目标,总功率图σ0值较小。通过对比图 2、3中车辆结构可知,此卡车头部尺寸较实验2中的卡车要小,且头部形状较为弯曲,这些原因造成其与地面的二面角效应较实验2弱。再者,此卡车箱体并没有封闭,车底平展且铁皮裸漏,造成其Pauli分解第一分量明显增加。这与微波散射规律相一致。
由实验1中270°姿态条件下,目标σ0值和道路两边杂波σ0值大小比较可知:若不考虑道路条件作为地理约束,则很难利用CFAR等常规检测算子实现目标的检测提取;利用极化分解技术对该目标区域进行极化分解,则该目标区仍旧表现出应有的3种极化成分比。因此,在目标辨识过程中,考虑目标的极化散射特性及各成分比,对于目标的检测、识别则大有裨益。
4.结论与展望
利用不同入射角的Radarsat-2星载全极化SAR影像,对典型方位下的大型卡车车辆目标散射特征、极化特征进行了初步实验分析,并得出如下结论:
1)入射角对车辆目标的后向散射特征影响居于首位。若以车辆目标检测为目的,则应尽可能选择大入射角成像条件下的星载SAR图像作为数据源。
2)方位角姿态对车辆目标σ0值影响较大,0°与180°为最优检测方位角姿态。这由车辆目标与地面构成二面角效应,造成强回波决定。
3)全极化数据可以利用极化分解技术进一步验证车辆目标的特性。在Pauli分解的三种成分中,偶次散射是车辆目标的显著特征。在 0°与180°,90°与 270°状态下,偶次散射绝对占优。即便在45°与135°姿态下,偶次散射分量依旧与其他分量所占比重相当。
4)若考虑道路交通网这一先验地理信息约束,使车辆目标及集群的检测与辨识,均在这一个背景约束下进行。那么,基于新型全极化星载SAR影像的道路交通监测将成为一个很有潜力的应用方向[10]。
考虑目标对称性和实验场地大小的限制,本文选择在平行、垂直、45°(或225°)夹角三个典型方位,及不同入射角条件下,进行了实地车辆摆放。并依此实验数据给出了相应的初步分析结论。研究其他角度的普遍变化规律,即小方位角度间隔变化情况下的车辆目标特征变化,将是后续研究工作的重点。
[1] DRAGOSEVIC M V,CHIU S.Space-based motion estimators-evaluation with the first RADARSAT-2 MODEX data[J].IEEE Trans.Geoscience and Remote Sensing Letters,2009,6(3):438-442.
[2] DATCU M,CERRA D,CHAABOUNI H,et al.Extending airborne SAR-ATI algorithms to the RADARSAT-2 Moving Object Detection Experiment(MODEX)[C]//Proc.IGARSS,Boston,MA,July.2008,1:165-168.
[3] LUKOWSKI T I,YUE B,MATTAR K.Synthetic aperture radar for search and rescue:polarimetry and interferometry[J].Proc.IGARSS,Anchorage,AK,Sep.2004,4:2479-2482.
[4] HOUNAM D,BAUMGARTNERS,BETHKE K H,et al.An Autonomous,Non-cooperative,Wide-area Traffic Monitoring System Using Space-based Radar(TRAM RAD)[C]//Proc.IGARSS,Seoul,Korea,Jul.2005:2917-2920.
[5] PALUBINSKAS G,RUNGE H.Radar signatures of a passenger car[J].IEEE Trans.Geoscience and Remote Sensing Letters.2007,4(4):644-648.
[6] PALUBINSKASG,RUNGE H.Change detection for traffic monitoring in TerraSAR-X imagery[C]//Proc.IGARSS,Boston,MA,July.2008,1:169-172.
[7] MEYER F,HINZ S.The feasibility of traffic monitoring with terraSAR-X-analyses and consequences[C]//Proc.IGARSS,Anchorage,AK,Sep.2004,2:1502-1505.
[8] 韩传钊等,译.合成孔径雷达系统与信号处理[M].北京:电子工业出版社,2006:60-62.
[9] 王 超,张 红,陈 曦,等.全极化合成孔径雷达图像处理[M].北京:科学出版社,2008:70-73.
[10] 杨 文,陈嘉宇,孙 洪,等.基于SAR图像的点状目标检测方法研究[J].电波科学学报,2004,19(3):362-366.
YANG Wen,CHEN Jiayu,SUN Hong,et al.Study on point targets detection in SARimages[J].Chinese Journal of Radio Science,2004,19(3):362-366.(in Chinese)
猜你喜欢
大学物理实验(2022年6期)2022-03-03
幼儿园(2021年12期)2021-11-06
中学数学研究(广东)(2019年12期)2019-07-18
汽车观察(2018年12期)2018-12-26
小学生必读(低年级版)(2018年9期)2018-12-13
弹箭与制导学报(2018年3期)2018-08-28
产品可靠性报告(2017年6期)2017-09-05
儿童故事画报(2017年4期)2017-05-26
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
