改进的神经网络PID算法及在温度控制中的应用
2010-08-17 09:37陈先桥
武汉理工大学学报(交通科学与工程版) 2010年6期
高 健 陈先桥
(武汉理工大学自动化学院1) 武汉 430063) (武汉理工大学计算机学院2) 武汉 430063)
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器[1].但是常规的PID控制无法解决稳定性与准确性之间的矛盾,增大控制作用可使误差减少,准确性可以提高,但是降低了稳定性.反之,为保证稳定性,限制控制作用,这样又降低了控制的准确性.即使对被控对象整定了一组满意的PID控制参数,当对象特性发生变化时,也难以保持良好的控制性能.为了获得满意的控制系统性能,一般说来,单纯采用线性控制方式是不够的,还必须引进一些非线性控制方式.因为在系统动态过程及暂态过程中,对于比例控制、积分控制和微分控制作用的要求是不同的.所以,在控制过程中要根据系统的动态特征和行为,借助于专家经验、启发式直观判断和直觉推理规则,采取类似于人脑“灵活机动”的智能化控制方式,从而解决控制系统中的稳定性与准确性的矛盾,增强系统对不确定性因素的适应性.
人工神经网络一经提出后,便得到了广泛的应用,国内外许多科技人员结合相关领域的课题进行了有益的探索,并取到了较好的效果[2-3].本文在前人有关工作的基础之上,结合天然气制冷及炼焦厂制冷站特殊环境的应用,提出了相关的模糊控制规则,在实际应用中取得了较好的效果.
1 PID控制基本原理
PID控制器是一种线性控制器,它根据给定值yr与实际输出值y构成控制偏差

将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象(在本文中控制对象为天然气进气阀的开度值)进行控制,其控制规律为

考虑时间为[0,T]区间,将其等距离离散为长为τ小区间,则式(2)转化为

式中:t=kτ;K I=K′iτ;K D=K′d/τ.对式(3)两边进行Z-变换后,可得离散PID对应的传递函数为

该方法的缺点是每次输出都与过去全部的状态值相关,实现起来计算量大,容易产生误差的病态放大.实际应用中,通常采用增量式PID控制算法,对式(3)相邻两项相减,可得

式中:Δu(k)=u(k)-u(k-1);Δe(k)=e(k)-e(k-1),对式(5)进行简单的合并化简可得

在实际应用中,根据不同被控对象适当地整定PID的3个参数.这种整定参数的过程,其是对比例、积分和微分3部分控制作用的折衷[4-6].在本系统设计中根据PID控制器各参数的影响特性和天然气流量温度控制模型对控制性能的要求,来决定调节器参数的调整.
常用的参数整定方法有:经验公式法、仿真试验法、继电型PID自整定方法、智能型PID参数自整定方法、神经网络PID参数自适应整定方法等.本文中讨论基于改进的神经网络PID参数整定方法.
2 神经网络PID参数整定算法
本文采用3层BP神经网络.设 x1,x2,…,xn为输入层神经元各结点的值;vj1,vj2,…,vjn为输入层各神经元与隐层第j个神经元的连接强度,即权值;f(◦)为传递函数;y j为隐层第j个神经元的输出;w j1,wj2,…,wjn为隐层各神经元与输出隐层第j个神经元的权值;Oj为输出层第j个神经元的输出.

输入层神经元个数选择3个变量:x1=e(k),x2=e(k)+e(k-1),x3=e(k)-e(k-1)-e(k-2);输出层有3个量:O1=K P,O2=K I,O3=KD.而该3个PID控制参数取决于神经网络中隐层与输出层的权值及传递函数.其中,输入参数的选取需保证3个输入参数不相关性,同时还考虑到不依赖过多的以前时间段误差项,以保证系统的稳定性.神经网络的输出取为O1=K P,O2=KI,O3=KD实现了PID参数的自动整定.
采用神经网络实现PID参数整定的一般过程是,利用系统给定值r(k)和实际的输出值的偏差,自动调节PID控制器的参数,使得给定性能指标最优.
系统的目标函数可以定义为

考虑到实际应用中,PID的3个输出参数很难给出与可观察的输入量之间的解析表达式.因此,可根据式(3),定义PID系统设计的若干组输出值与由经式(7)、(8)整定后得到的参数 KP,K I,K D,再由式(3)计算出输出进行比较,得到如下的目标函数

对k项而言

通过目标函数(10)求解优化PID参数K P,K I,K D,通常是采用最速下降迭代求解方法.
在迭代过程中,首先任取2组隐层和输出层的权值,得到一组输出值;根据式(11)、式(12)修改权值,但在实际应用中经常出现计算时间长,收敛速度慢的问题,甚至导致不收敛的结果.
本文提出一种改时的神经网络迭代算法.在每次迭代过程中,搜索4个方向,如图1所示.
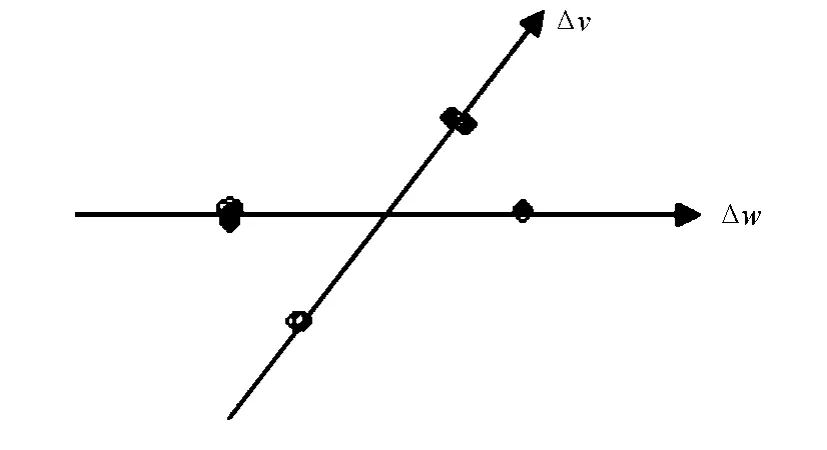
图1 BP神经网络搜索方向

每次迭代过程中,通过式(13)~(14)计算出4组修正权值,代入式(10)比较4个不同的目标误差值,取最小的一项所对应的修正权值作为最后输出结果.从理论上讲,每一步迭代过程中基本上都是近似地选择最佳的搜索路线.
3 基于ProcessLogix系统和神经网络PID控制结构设计
ProcessLogix系统是美国罗克韦尔的Logix体系结构通过集成DCS的过程控制和PLC的离散/顺序控制提供第一个混合控制系统.根据ProcessLogix的特点和实际情况的需要,本系统设计为2级PID级联的形式,如图2.其中神经网络的PID系统通过ProcessLogix提供的脚本语言,嵌入到2个PID模块的参数整定之中.

图2 PID温度流量控制器结构
系统设计中,第一级为温度PID控制器,第二级为流量PID控制器.通过温度PID控制器,得到一个较稳定的输出.然后,将其作为第二级流量PID控制器的输入,实现流量控制阀的自动调节.2个PID控制器参数整定过程中,输入层神经元个数选为:x1=e(k),x2=e(k)+e(k-1),x3=e(k)-e(k-1)-e(k-2);输出层为:O1=KP,O2=K I,O3=K D.
4 结束语
通过对实际运行结果的分析对比,可以得出结论:PID控制方法存在较大超调,自适应能力差,但稳态精度较高.为了弥补 PID控制的不足,给出了一种改进的神经网络 PID控制参数自适应整定控制策略的解决办法.实践结果表明,一种改进的神经网络PID控制参数自适应整定控制方式能很好地兼顾系统的动态品质和静态精度的要求,控制系统鲁棒性强,具有快速跟踪性和良好的稳态精度.
[1]付 华,李大志.基于神经网络的PID自整定控制系统[J].工矿自动化,2009,27(7):72-75.
[2]马玲玲,郑 宾,马圆圆.基于神经网络PID智能复合控制方法研究[J].计量与测试技术,2009,36(3):17-19.
[3]王首彬.基于BP神经网络的PID控制器的仿真研究[J].电气传动自动化,2008,30(6):22-25.
[4]任子武,高俊山.基于神经网络的PID控制器[J].控制与决策,2004,23(5):16-19.
[5]Tang C C,Ho W K,Cao L S.A comparison of two design methods for PID controllers[J].ISA TRANS,2004(5):2-33.
[6]Kenji T,Toru Y,Takao H.A design of model driven cascade PID controllers using a neural network network,IEICE transactions on fundamentals of electronics[J].Communications and Computer Sciences,2004(1):2322-2330.
猜你喜欢
浙江大学学报(理学版)(2022年4期)2022-07-25
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
力学学报(2020年4期)2020-08-11
商洛学院学报(2020年4期)2020-07-08
人民珠江(2019年4期)2019-04-20
铁路计算机应用(2018年5期)2018-06-01
科学与财富(2017年15期)2017-06-03
黑龙江电力(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11