风力发电系统的暂态仿真模型研究
2010-07-12 17:37:08黄萃
浙江电力 2010年7期
黄萃
(杭州市电力局, 杭州 310009)
发电技术
风力发电系统的暂态仿真模型研究
黄萃
(杭州市电力局, 杭州 310009)
详细归纳了不同类型风力发电系统的暂态仿真模型,研究了包括空气动力系统、风机轴系系统、 桨距控制系统和变频器在内的动态仿真模型, 以双馈风力发电机为例, 研究了变桨距恒频/变速风力发电系统的控制系统模型。 最后,在电力系统分析软件 DigSILENT PowerFactory 上分别对异步风力发电机、双馈风力发电机和全换相同步风力发电机进行建模,模拟变风速条件下不同类型风力发电机的动态特性。仿真结果进一步验证了所研究模型的正确性。
风力发电;仿真;模型;研究
随着风力发电规模化开发和商业化发展,目前全球已有 70多个国家使用风能发电, 风电消费占世界电力消费的 1.3%。 早在 2008 年底,我国风电建设容量就已突破 1 000 万 kW, 成为世界重要的风电大国。
本文重点介绍典型风力发电系统动态仿真模型,利用仿真模型分别对异步风力发电机、双馈风力发电机和同步风力发电机进行建模,分析了3种机组在变风速条件下的动态特性。
1 风力发电系统仿真模型
虽然风力发电系统的并网形式有多种,但结构上仍有不少相似之处。在对风力发电系统进行仿真建模时,一般需要考虑以下几个子系统模型:空气动力系统模型、桨距控制模型、发电机轴系模型、发电机模型、变频器及其控制系统模型等。发电机模型及其控制系统属于经典模型,此处不再赘述。
1.1 空气动力系统模型
空气动力系统模型用于描述将风能转化为风机功率输出的过程,其能量转换公式为:

式中:ρ为空气密度;R为风机叶片的半径;v为叶 尖风 速 ;Cp表示 风能 的 转换 效 率;λ = ωwtrR/v,表 示叶尖速比, ωwtr为风机的 机械角速度; θ表 示叶片桨距角。
当采用变桨距控制时,控制系统先将桨距角置于最优值,再通过变速控制使叶尖速比λ等于最 优 值 λopt, 从 而 使 风 机 能 够 在 最 大 风 能 转 换 效率 Cpmax下运行。 采用定桨距时, Cp受叶尖速比 λ的影响,风机只能在某一风速下获得最优风能转换效率 Cpmax, 而更多时候则运行在非最佳状态。
对于恒频/恒速定桨距型风力发电机组, 式(2)给出了一种 Cp特性曲线近似描述。
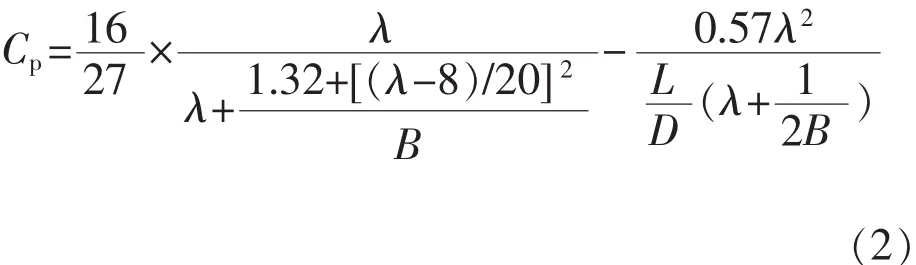
式中: B 为叶片数; L/D 为升力比。 当叶片数为1,2,3, 且满足时, 式(2)能够较精确地拟合实际风力机的 Cp特性曲线。
对于恒频/恒速变桨距型风力发电机组,与式(3)对应的一种 Cp特性曲线近似式为:

式中: Cf为叶片设计参数, 一般取 1~3; R 为风机叶片半径。
对于恒频/变速变桨距风力发电机组, 式(4)给出了一种 Cp特性曲线近似描述:

式 中 :αi,j, βi是 一 组 常 数 , 当 2<λ<13 时 , 该 公式能够较好地拟和 Cp曲线。
1.2 轴系模型
风力发电系统的轴系一般包含 3个质块:风机质块、齿轮箱质块和发电机质块 (直驱风力发电系统无齿轮箱质块)。风机质块的惯性一般较大,而齿轮箱惯性较小。
两质块轴系系统如图1所示,由于齿轮箱的惯性比风机和发电机小得多,如果忽略齿轮箱的惯性,将低速轴各量折算到高速轴上,则对应的状态方程为:

式 中 : Twtr为 风 机 的 转 矩 ; Jwtr为 风 机 的 惯 性 常 数 ;ωwtr为 风 机 的 转 速 ; Dtg为 传 动 轴 阻 尼 系 数 ; ktg为传 动 轴 刚 性 系 数 ; θwrt为 风 机 质 块 转 角 ; Tgen为 发电 机 机 械 转 矩 ; Jgen为 发 电 机惯性 常 数 ; ωgen为 发电机转速。

图1 两质块模型示意图
如果进一步忽略传动轴的阻尼系数和刚性系数 ,即 假 设 Dtg=0, ktg=0, 则 可 以 得 到 传 统 的 单质块模型:

不同的轴系模型应用场合各有不同,在风力发电系统的建模仿真中,两质块的模型较为常用。
1.3 桨距控制模型
早期的风力发电系统以定桨距(失速型)风力发电机为主导机型。当风速高于额定风速时,气流将在桨叶的表面产生涡流,导致升力系数减小,阻力系数增大,产生失速效应,限制发电机的 功 率 输 出 , 仿 真 中 可 利 用 式 (2) 给 出 的 Cp特 性来模拟被动失速效应。近年来,变桨距控制技术获得了广泛的应用。变桨距风力发电机组的桨距角控制一般以发电机的电气量作为反馈信号。无论风速变大还是变小,控制系统都能调整叶片角度,使之获得较稳定的功率输出。
恒频/恒速风力发电系统采用变桨距控制时,一般采取主动失速控制。当风速在额定风速以下,控制器将桨距角置于 0°, 等同于定桨距风力发电机组。当风速超过额定风速时,叶片失速特性导致输出功率有所下降,为了弥补这部分功率损失,可在一个较小的范围内调整桨距角,以提高风机的功率输出。
图2 给 出 了 以 发 电 机 转 速 ωgen作 为 控 制 器 输入信号的主动失速控制系统框图,桨距角控制部分的桨距控制参考角 θref限幅环节设定如下:

式 中 : θrefmax和 θrefmin为 PI 调 节 器 上 限 和 下 限 幅值 。 θrefmin一 般 设 为 零 , 这 样 当 发 电 机 转 速 ωgen低于 额 定 转 速 ωref时 , PI 调 节 器 的 输 出 θref为 零 , 桨距角 θ相应地被控制在 0°, 伺服控制系统不动作。 当发电机转速 ωgen高于额定转速 ωref时, PI 调节 器 的 输 出 θref大 于 零 , 伺 服 控 制 系 统 动 作 , 实现桨距角的调节。
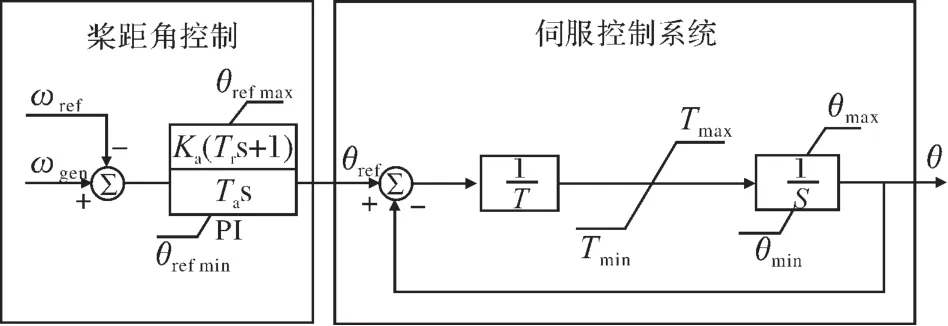
图2 主动失速变桨距控制系统框图
2 双馈风力发电系统
2.1 风机最优转速
风机在某个固定风速下存在最优转速,在该转 速 下运行 , 风机 能够获 得 最 大 功 率 输 出 Pwmax,转速变小或变大时,风机输出功率都会降低。
如果能够控制风机系统使其按照功率—转速最优特性曲线运行,则系统在给定风速下输出的功率最大。由于风机的输出功率减去相关的系统功率损耗就等于发电机的实际有功功率输出,而发电机转速可以利用齿轮箱变比,由风机转速直接换算得到。因此,风机功率—转速最优特性曲线也可以用发电机功率—转速最优特性曲线来表示,后者更容易在实际控制系统设计中实现。
2.2 控制系统
恒频/变速风力发电机组采用变桨距控制时,一般与变频器控制系统结合。
双馈风力发电机的变速控制系统如图3所示,控制系统由桨距控制系统和变频器控制系统组成。风速低于额定风速时,两个控制系统共同进行功率最优控制;风速超过额定风速时,桨距控制系统进行功率限制控制。变频器控制系统将风力发电系统的有功功率控制在给定的功率参考值 Pref(风 速 超 过 额 定 风 速 时 , Pref=Pn),同 时 使 系统的无功功率输出和整流侧的直流电压等于设定值。

图3 双馈风力发电机控制系统示意
桨距控制系统含有2个互相耦合的控制器:转速控制器和功率控制器。
(1)当风速小于额定风速时, 桨距角将置于0°(即最优桨距角)不作调节, 此时主要由转速控制器实现功率最优控制。转速控制器的控制策略基于如图4所示发电机功率—转速最优曲线实现。功率—转速最优曲线上每一个功率值都会对应 一 个 最 优 的 转 速 ωgenopt, 当 系 统 没 有 运 行 在 最优状态时(ωgen不等 于 ωgenopt), 需 要 通 过 调 节 转 速将系统控制在最优运行状态,即调整发电机的转速至最优转速 ωgenopt。 由于发电机转速跟风机转速存在一一对应关系,风机转速将被间接的控制在最优值 ωwtropt上, 从 而 获 得 最 优的 叶尖速 比 λopt= ωwtroptR/v 和 最 优的 Cpmax, 实 现最优功 率 控制。
(2)当风速大于额定风速时, 伺服控制系统将会动作。发电机的实际输出功率将被限制在额定功 率 Prated。
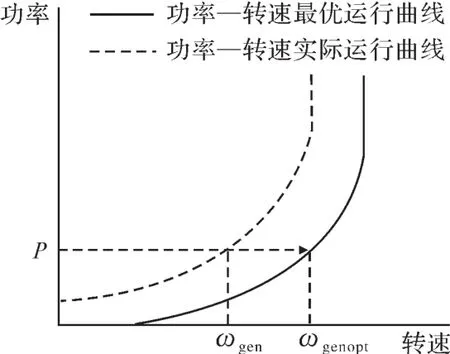
图4 功率—转速最优曲线示意图
(3)当风速大幅超过额定风速时, 耦合环节动作,这样2个控制器将会同时控制桨距角的输出。一方面功率控制器动作,调整桨距角限制功率的输出;另一方面转速控制器动作,将发电机转速控制在额定转速。
2.3 变频器模型
双馈异步电机变频器的2个换流器的功能相对独立:网侧换流器实现输入单位功率因数控制和在各种状态下保持直流电压稳定,确保转子侧换流器可靠工作;转子侧换流器的主要功能是实现对双馈电机的矢量变换控制,确保电机输出解耦的有功和无功功率;采用高频自关断器件和空间矢量 SPWM 调制方法, 可以有效消除低次谐波,改善输入、输出特性。
转子侧换流器的控制模型如图5所示,电机的转矩和定子侧有功功率通过控制转子电流的转矩分量 irq实现, 而转子侧的无功功率通过控制转子电流的励磁分量 ird实现。 外环功率控制器根据有 功 指 令 Pref和 无 功 指 令 Qref输 出 内 环 控 制 器 的有功 、 无 功 电 流 指 令 Iqref和 Idref, 内 环 电 流 控 制 器根据电流参考指令输出调制信号 Pmd和 Pmq。 电网侧换流器的控制模型与图5类似,控制目标是维持 直 流 侧 电 压 Udc等 于 参 考 电 压 Udcref, 同 时 控 制逆变器与电网之间交换的无功功率为零。

图5 转子侧换流器控制
3 全换相风力发电系统
全换相风力发电机也是一种恒频变速风力发电系统,换流器将频率变化的电能转换为与电网频率相同的恒频电能。这种类型风力发电系统的发电机一般采用低速多极永磁同步发电机,可省去风机与发电机之间的传动机构,降低系统成本,并增加系统的可靠性。此外,还可以采用普通同步发电机或异步发电机通过变频器并网,但由于发电机转速较高,风机与发电机间需要通过齿轮箱进行啮合。
采用双 PWM 换流器的全换相同步风力发电系统结构如图6所示。控制系统与双馈风力发电系统类似。功率控制器根据风机转速输出有功控制指令给整流器。整流器根据有功控制指令改变发电机定子输出电流,从而控制同步发电机的输出电磁功率。逆变器维持直流侧电压和向电网输出的无功功率恒定。
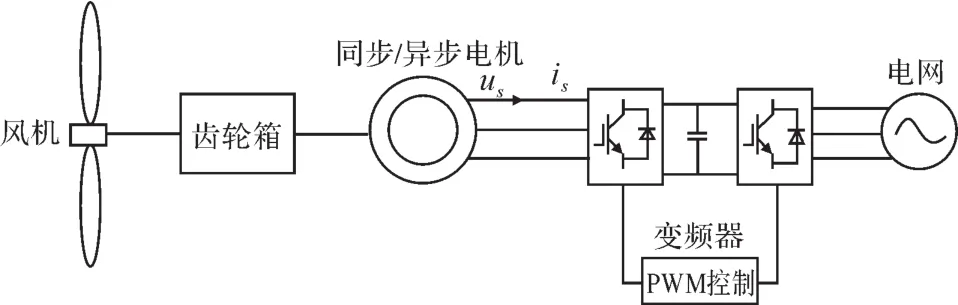
图6 同步风力发电系统仿真框图
永磁直驱风力发电系统的风力机直接驱动多极永磁同步发电机,省去了变速齿轮箱,利用整流器控制永磁同步发电机的转速, 实现恒频/变速运行,捕捉最大风能。
4 仿真
按照本文所介绍的建模方法, 在 DigSILENT PowerFactory 上分别对异步风力发电机、 双 馈风力发电机和同步风力发电机进行建模,轴系系统采用两质块模型。采用恒压源模拟外部电网,输出经升压变压器接入系统。
4.1 变风速条件下仿真
由图7,8和 9可以看出, 相比异步风力发电机,双馈异步发电机和同步风力发电机具有较好的无功控制特性,在变风速情况下,输出的无功功率基本能够控制在初始设定值附近 (一般设定为零)。 由于异步风力发电机需要从电网吸收无功功率,通常需要配置固定电容器进行无功补偿,在变风速情况下,无功功率随有功功率输出的变化波动较大。
异步风力发电机转速基本维持在略高于同步转速,同步风力发电机转速基本等于同步转速。由于采用变速运行,相比于恒速风机,变速风机能够实现最大风能跟踪控制。
4.2 单相接地故障的仿真分析
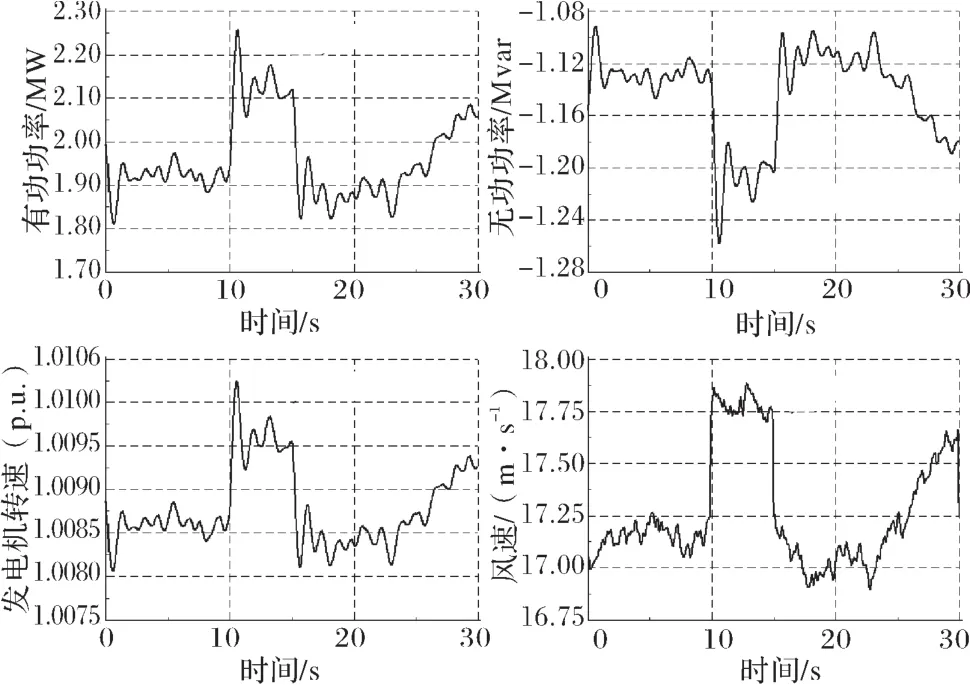
图7 异步风力发电机变风速下的输出功率和发电机转速

图8 双馈风力发电机变风速下的输出功率和发电机转速
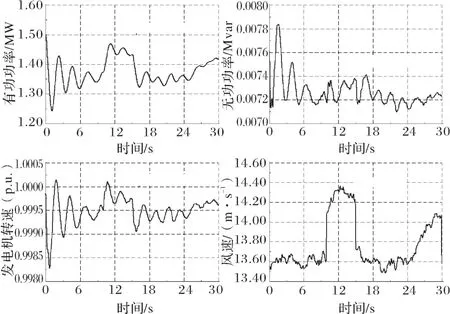
图9 同步风力发电机变风速下的输出功率和发电机转速
图10 为采用 Crow-bar保护后的 5 MW 双馈风力发电机在并网母线处发生A相接地短路故障后的电磁暂态仿真结果。由图可以看出,在0 s发生故障后,双馈风机并网母线处A相、B相电压降低,C相电压升高,风机转子电流由于故障增大, 风机转速增加。在故障发生瞬间,Crow-bar保护动作,转子绕组短路,双馈风机可以等同于异步风力发电机,有功输出功率下降,同时吸收的无功功率增大。 0.15 s故障切除后, 并网母线电压恢复正常, Crow-bar 保护在检 测到发电机转速、机端电压和转子电流恢复正常后经过一定时间延迟动作, 在 0.48 s 处打开短接开关, 经过短暂功率波动后,风力发电机恢复至故障前运行水平。在整个故障期间,风电机组仍能够持续挂网运行(风电场输出的有功功率下降), 风力发电机具有一定的低压穿越能力。

图10 双馈风力发电机故障前后有功、无功功率和转速
5 结语
通过不同类型风电机组的仿真结果可知:
(1)在变风速条件下, 双馈异步发电机和同步风力发电机具有较好的无功控制特性,在系统需要和设计容量允许的范围内,可以参与系统的无功调控。
(2)相比恒频/恒速风力发电机, 变速风机具有较好的调速特性,能够实现最大风能跟踪控制,最大化利用了风力资源。
(3)电网电压大幅跌落时, 双馈风电机组转子电流突增幅值大, 超过 Crow-bar 保护动作值时保护动作,三相转子绕组被短接,双馈风机可以等同于异步风力发电机,有功输出功率下降,同时吸收无功功率增大。在 Crow-bar保护的配合下,风电机组仍能够持续挂网运行 (风电场输出的有功功率下降),风力发电机具有一定的低压穿越能力。
参考文献:
[1]ERICMARTINOT.全 球 可 再 生 能 源 报 告[R].2005.
[2]European Wind Energy Association(EWEA).Wind Energy-THE FACTS-An analysis Wind Energy in the EU-25-Executive Summary[Z].2004.
[3]施 鹏 飞 .2008 年 中 国 风 电 装 机 容 量 统 计[C/OL]. 中 国 风能 协 会 .http∶//www.cwea.org.cn/download/display_info.asp? id=31.
[4]FLORIN IOV, ANCA DANIELA HANSEN, POUL SORENSEN,et al.Wind Turbine Blockset in Matlab/ Simulink[M].Aalborg University March,2004.
[5]ANCA D.HANSEN, CLEMENS JAUCH, POUL SORENSEN, etal.Dynamic wind turbinemodels in power system simulation tool DIgSILENT[M].Riso National [6]Laboratory, Roskilde December 2003.MONICA CHINCHILLA, SANTIGO ARNALTES,JUAN CARLOSBURGOS.Control of Permanent-Magnet Gen erators Applied to Variable-Speed Wind-Energy Systems Connected to the Grid[J].IEEE TRANSACTIONS ON ENERGY CONVERSION,2006,21(1)∶130-135.
(本文编辑:李文娟)
A Study on Transient Simulation M odel ofW ind Power Generation System
HUANG Cui
(Hangzhou Municipal Electric Power Bureau,Hangzhou 310009,China)
The paper summarizes transient simulation models in different wind power systems in detail,researches the dynamic simulationmodels including aerodynamic system,wind turbine shaft system,blade pitch control system and frequency converter.Taking double-fed wind turbine as an example,it researches the control system model of variable-pitch,constant-frequency/variable-speed wind power system.Finally,simulation modeling of asynchronous wind turbine,double-fed wind turbine and full phase changing synchronous wind turbine are performed with software DigSILENT PowerFactory.The dynamic characteristics of different types ofwind turbines are simulated under variable wind speeds.The results verify the validity of simulation model mentioned.
wind power generation;simulation; model;study
TM614
: A
: 1007-1881(2010)07-0022-05
2009-10-13
黄 萃(1974-), 男, 浙江临安人, 工程师, 华北电力大学在读工程硕士,从事配电网工程施工管理工作。
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
电力科学与工程(2022年9期)2022-10-10 03:20:36
大电机技术(2022年3期)2022-08-06 07:48:18
电力建设(2022年7期)2022-07-04 02:50:50
防爆电机(2021年6期)2022-01-17 02:40:18
东方汽轮机(2020年3期)2020-11-04 11:07:34
山东工业技术(2016年15期)2016-12-01 05:31:27
电测与仪表(2015年16期)2015-04-12 00:44:38
电机与控制应用(2015年3期)2015-03-01 03:49:52
大电机技术(2015年5期)2015-02-27 08:22:27