滑模变结构控制在空间机器人姿态控制中的应用
2010-07-10 06:51徐向峰李晓茹郭晓君
制造业自动化 2010年6期
徐向峰,宁,李晓茹,郭晓君
(河南工业大学 机器人研究所,郑州 450007)
0 引言
空间机器人在未来的空间活动中将扮演越来越重要的角色。机器人对卫星的在轨服务,如维修、更换星上设备、补给燃料等,将会延长卫星寿命、降低成本,这使得空间机器人技术成为最有吸引力的研究领域之一。机械臂的运动会改变基座的姿态,而姿态对于电源、通信等分系统来说,是非常重要的,因而基座一般都装有飞轮、喷气装置等作为姿态控制装置。通常情况下,安装在空间机器人空间操作臂上的姿态角传感器与施加控制力矩的执行器安装在不同的位置(非并置情形),这使得它们之间有一定的柔性,会对控制系统的设计过程带来一些困难,采用常规控制方法的性能指标恶劣,甚至无法使系统稳定[1,2]。滑模变结构控制作为一类特殊的非线性控制方法,在空间机器人姿态控制中有良好的适应性[4,5]。
实验室搭建了以气浮为重力补偿方式的基于在轨服务的遥操作自由飞行机器人地面试验平台。该机器人实际上是一颗服务星,通过对分布在星体四周的8个气动喷嘴进行伺服控制,来控制星体的前进、后退、左移、右移及绕Z轴的正、反转。星体上设置有对接机构,可以实现与其它目标星的交会对接。星体上的6DOF机械臂可以实现典型的在轨服务和插拔动作。在机械臂的端部安装有智能位姿传感器,可以灵敏地实现对目标进行定位。本文采用滑模变结构控制方法对空间机器人的姿态进行控制。
1 滑模变结构控制的基本原理
滑模变结构控制是变结构控制系统的一种控制策略。这种控制策略与常规控制的根本区别在于控制的不连续性,即一种使系统“结构”随时间变化的开关特性。该控制特性可以迫使系统在一定特性下沿规定的状态轨迹作小幅度、高频率的上下运动,即所谓的“滑动模态”或“滑模”运动。这种滑动模态是可以设计的,且与系统的参数及扰动无关。这样,处于滑模运动的系统就具有很好的鲁棒性。
滑模变结构控制的基本问题如下。
设有一控制系统:


2 空间机器人的数学模型
空间自由飞行机器人示意图如图1所示。
姿态传感器安装在空间机械臂末端,而施加控制力矩的执行器安装在基座上。因科学实验需要,连接传感器仪表箱与空间机器人基座的结构不能是完全刚性的,由此可知该系统为一类带有柔性的系统。图示机械臂末端姿态角θ2是我们要控制的变量,θ1是机器人本体基座与空间臂的夹角,受施加的控制作用直接控制。假设基座与安装在机械臂末端的智能传感器通过转矩常数为k,粘滞阻尼系数为b的弹簧连接,作用在机器人本体上的控制力矩为Tc,基座与传感器仪表箱的转动惯量分别记为J1,J2。

图1 空间自由飞行机器人示意图
运动方程如下:

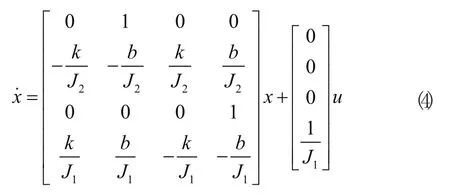
由运动方程可求出从控制输入Tc到输出θ1的传递函数G(s),也可列写出状态空间方程。为了采用滑模控制,我们采用状态空间方程形式。记状态变量为并设Tc=u,则有如下状态方程:
3 控制算法
我们的最终目标是找出控制量 的关于状态变量的表达式,使得被控量 跟随给定输入 的变化并满足一定的性能指标。
根据上述状态方程,记误差:

则可取切换函数:

其中α应为正值,以保证滑动模态是稳定的。在误差状态空间中,s表现为一条曲线或一个曲面。为保证状态运动轨线于有限时间内到达切换面,取指数趋近律:

其中的符号函数sgn(s)可用饱和函数sat(s)来代替,以实现鲁棒性更好的控制;ε是等速趋近项系数,λ是指数趋近项系数,为了保证快速趋近的同时削弱抖振,应在增大λ的同时减小ε。

控制系统的结构图如图2所示。
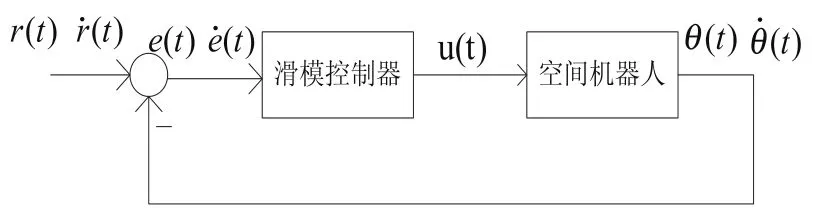
图2 控制系统结构图
4 仿真及结果
因本文主要是对控制算法进行原理性验证,故选择对象模型参数的标称值,对模型进行设计,进而测试控制器的性能。取J1=1,J2=0.1,k=0.091,b=0.0036,要满足期望的性能指标,这些值对应的装置是最难控制的。我们取滑模控制器参数α=0.05,ε=0.05,λ=10,在给定斜坡(等速)输入的情况下,对采用理想滑动模态与准滑动模态的控制器分别进行了实验仿真,仿真结果如图3、图4所示。
图3是理想滑动模态时的仿真结果,图4是准滑动模态时的仿真结果。可见两者均可达到不错的跟踪效果,控制器只是在初始时刻有较大的冲击,此后维持在较小的范围内进行切换。通过比较还可发现,基于准滑动模态的控制削弱了抖振,从而对干扰具有更好的鲁棒性。
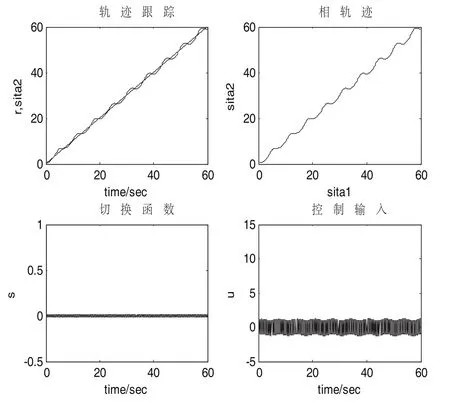
图3 理想滑动模态时的仿真结果

图4 准滑动模态时的仿真结果
我们还对输入为正弦波的情况进行了仿真,轨迹跟踪如图5所示。

图5 参考输入为正弦波时(Tr=60s)的跟踪结果
可见滑模变结构控制对空间机械臂姿态的跟踪与调整这类柔性系统能达到较好的控制效果。
[1] 宁祎,薛文奎,刘站立.遥操作机器人数据打包算法及蓝牙通信[J].制造业自动化,2009,31(5):37-40.
[2] 徐文福,詹文发,梁斌,等.自由漂浮空间机器人系统基座姿态调整路径规划方法的研究[J].机器人,2006,28(3):291-296.
[3] 刘金琨,著.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005,22-64.
[4] WOOSOON YIM, MANOHARAN SELVARAJAN, WILLIAM R.WELLS.Sliding mode cooperative motion control of dual arm manipulators[J].Artif Life Robotics(1999)3,166-169.
[5] KEIGOWATANABE,YAMATO SHIRAISHI, SPYROS G.TZAFESTAS, etc.Feedback Control of an Omni-directional Autonomous Platform for Mobile Service Robots[J].Intelligent and Robotic Systems (1998)22,315-330.
[6] SPYROS TZAFESTAS, MARK RAIBERT,COSTAS TZAFESTAS.Robust Sliding-mode Control Applied to a 5-Link Biped Robot[J].Intelligent and Robotic Systems(1996)15,67-133.
猜你喜欢
防爆电机(2021年2期)2021-06-09
模具制造(2019年7期)2019-09-25
制造技术与机床(2019年8期)2019-09-03
船舶标准化工程师(2019年4期)2019-07-24
中国惯性技术学报(2019年6期)2019-03-04
制造技术与机床(2018年11期)2018-11-23
意林(绘英语)(2018年1期)2018-04-28
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27