
应用于矿用电机车的新型交流牵引驱动系统
2010-07-02 01:13:21李保生杜贵平
自动化与信息工程 2010年1期
李保生 杜贵平
(1.永济新时速电机电器有限责任公司 2.华南理工大学)
应用于矿用电机车的新型交流牵引驱动系统
李保生1杜贵平2
(1.永济新时速电机电器有限责任公司 2.华南理工大学)
针对架线式矿用电机车负载变化频繁、供电波动较大、工作环境恶劣等具体工程实际问题,提出了具有最大转矩输出能力的改进型转差频率控制方法及重载转矩补偿和母线电压补偿措施,研制了DC550V/ 300KW实验样机。仿真和实验表明,驱动系统在启动和拖动过程均具有较大的转矩输出能力和良好的动态响应特性,提高了牵引性能和系统的可靠性。
矿用电机车;最大转矩;转差频率
1 引言
架线式窄轨电机车是广泛应用于地下铁道及工矿挖掘工程等领域的重要牵引动力设备,经常面临负载变化频繁、供电波动较大、工作环境恶劣(振动、潮湿、腐蚀等)等具体工程实际问题,针对上述问题及需求,综合考虑目前交流驱动系统主流控制方法的优缺点[1~5],兼顾工程实用性和技术先进性,研究并提出了具有较大转矩输出的改进型转差频率控制方法以及母线电压补偿及重载转矩补偿措施,设计了工程样机,并开展了仿真和实验研究。
2 系统构成及工作原理
驱动系统主要由功率电路、系统控制电路、保护电路三部分构成,系统结构如图1所示:

图1 系统总体框图
主功率电路主要由浪涌抑制环节、直流侧滤波电容、制动模块、三相逆变桥及缓冲吸收电路组成。架线直流电压经滤波后,由控制电路通过脉宽调制信号控制三相逆变桥的功率管工作输出正玄电流,拖动电机运行;浪涌抑制环节防止开机浪涌冲击,制动模块实现机车的有效制动,缓冲吸收电路用来减小功率开关管的电应力,保证逆变桥稳定工作。
系统控制电路由辅助电源电路、数字控制电路和驱动电路组成。辅助电源电路将架线电压经滤波、稳压、分压、高频变换、变压器处理等环节为控制电路提供各等级的直流电源;数字控制电路实现信号的综合分析、控制算法和用户界面的设计;驱动电路实现对六管电路IGBT器件的驱动处理。
保护监测包括电流、电压、温度保护电路。电流保护电路是对电机定子电流的检测保护电路;电压保护电路是指对直流侧电压的检测、保护并进行相关补偿;温度保护电路是对变频器底座温度的检测保护,避免过热引起变频器异常。
3 最大转矩转差频率控制策略
窄轨电机车通常运行路面不平坦,负载较重,除了要求具有良好的动态性能和调速特性以外,还要求机车能够应对重载情况,并具有较大的输出转矩,尤其是启动转矩。异步电机起动转矩与频率有关,起动时,一般转速较低,但起动转矩与频率并非简单的单调递增或递减关系。为了得到最大起动转矩,对转矩与转差频率的关系进行进一步的探讨:
异步电机转矩与电压、转差率、频率间的关系[6]:

K为电机结构参数,代入相关参量可得:
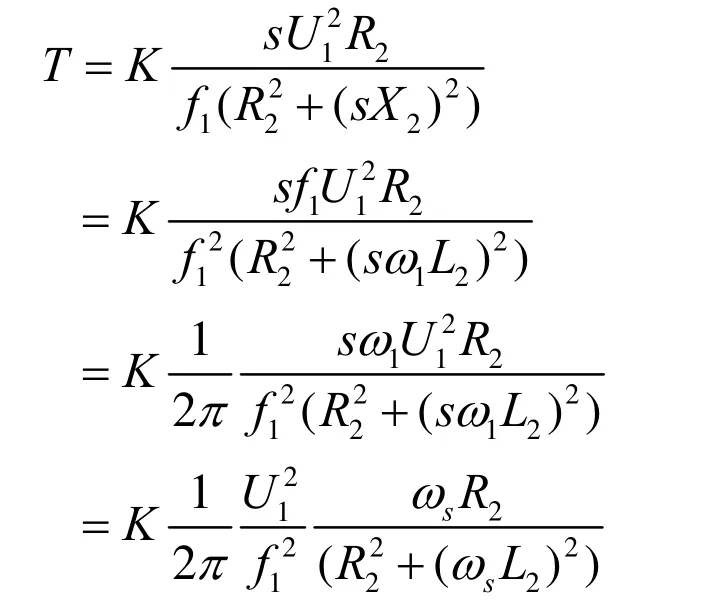
可得转矩与转差频率的关系如下:

其中,Ks是依赖于电机结构的参数,在磁通恒定时为常数。在电机稳定运行时,转差频率sω很小。
异步电机起动瞬间,转差率s=1,此时sω=ω,将此关系代入式(1),可得到起动转矩与频率的函数关系式:

将上式对频率求导等于零,可得到最大起动转矩对应的频率,即:

因此,当sω满足下式(4)关系时,电机具有最大起动转矩,记此时的转差频率为ωmax。

进一步研究,可以发现,在运行过程中保证上式成立,可得到最大输出转矩。传统转差频率法限制了因而传统转差频率法不具备最大起动转矩。为了消除PI参数的影响,同时得到最大转矩,在本文的算法中,不再引入PI调节器。最大转矩转差频率法的控制规律简要如以下公式表示:

其中ωref表示参考角速度,2ω表示实测转速的旋转角速度;ωmax表示最大转矩对应的转差角频率。
在电机启动瞬间,反馈转速为零,此时根据式(4),得到的转差频率对应最大转矩,保证最大启动转矩。而在运行过程中也保持对转差频率的控制,因此系统具备最大输出转矩功能。
与传统转差频率法相比,本控制策略无须PI调节,而是根据式(5)进行简单的运算得到对应最大转矩的转差频率。同时,利用恒压频比方法代替传统方法的电流-转差频率曲线,便于数字化实现。
本文提出的方法在机车稳定运行时具有最大的输出转矩,在重载时也通过调整电压补偿转矩,使整个控制过程保持较大的输出转矩,不仅适应机车运行的实际情况,且修正了传统转差频率法的不足,易于数字化实现。
4 仿真及实验研究
为了验证最大转矩转差频率法的大转矩输出特性,利用MATLAB/SIMULINK构建了系统的控制模型,见图2。

图2 最大转矩转差频率法Simulink仿真框图
图3为最大转矩转差频率法与开环恒压频比方法的人为特性仿真曲线,参考转速3000r/min。
图3反映了调速过程中,转矩的变化情况。由图可明显看出,最大转矩转差频率方法具有较大的起动转矩,且在调速过程中始终保持最大的转矩输出,转矩的变化较为平整。虽然以上最大转矩转差频率法比较的对象是开环恒压频比方法,但其结果适用于最大转矩转差频率法与传统转差频率法的比较。另外,与传统转差频率方法相比,最大转矩转差频率方法还有无需调节控制器参数,移植性好等特点。

图3 最大转矩转差频率法与开环恒压频比方法调速过程转矩变化比较图
基于以上算法,实际研制了DC550V/300kW工矿用电机车交流驱动系统(见图1),并进行了现场模拟试验,闭环模式下设定参考频率为50Hz,稳定运行时定子电流波形如图4。由图中可以看出,此时输出电流具有良好的正弦特性。

图4 闭环模式参考频率50Hz定子电流波形

图5 闭环模式下电机升速过程定子电流波形
为了验证本文控制算法调速过程平稳、转矩冲击小等特点,我们观察了电机升速的电流波形,见图5。从图中可看出升降速过程较快,且过程中转矩稳定(表现为电流幅值变化稳定),不存在转矩冲击(电流幅值不存在突变)。
5 结论
针对机车要求较大转矩、运行环境恶劣等情况,本文从最大启动转矩推导出发,在传统转差频率法的基础上加以改进,提出最大转矩转差频率法。理论研究及仿真试验表明该方法具有更优良的转矩输出特性。结合提出的算法和转矩补偿等措施,已开发了集成于数字系统的电机车交流驱动系统,并通过了实践验证,表明基于本文方法的控制器具有较高的转矩输出,且调速过程平滑,电流正弦特性好,具有低压时低速平滑运行的性能。具有较大的工程实用价值。
[1] FINLAYSON P T. Performance Comparison of Digital AC and DC Drives[C]. IEEE Conference of Industry Applications Society Annual Meeting. Washington DC. USA. October, 1992, 1: 365~369
[2] WAGNER R. AC Drive Technology For Locomotives[C]. ASME/IEEE Railroad Conference. USA. December, 1989, 1: 1~5
[3] EATON G M. The Development of The Electric Mine Locomotive[J]. Transactions of American Institute of Electrical Engineers, 1914, 33(1): 403~429
[4] DUFFY M C. Three-phase Motor in Railway Traction[J]. IEE Proceedings of Science Measurement and Technology, 1992, 139(6): 329~337
[5] ZHAO M H, SHEN M S, DIAO L J, et al. Design andRealization of 200KVA AC Mine Locomotive[C]. IEEE Conference on Vehicle Power and Propulsion. Harbin. China. September, 2008: 1~5
[6] 杨兆华,秦忆.异步电机矢量控制与转差频率控制的动态性能分析[J]. 中小型电机, 1998, 25(6): 1~4
[7] LU C G, DAWSON G E, EASTHAM T R, et al. Dynamic Performance of a Linear Induction Motor with Slip Frequency Control[C]. IEEE Canadian Conference on Electrical and Computer Engineering. Canada. September, 1993, 2: 1057~1060.
[8] 史琴. 矿用架线式机车变频调速系统研究[D]. 西南交通大学, 2007
A Novel AC Drive System For Electric Mine Locomotive
Li Baosheng1Du Guiping2
(1. Yongji Xinshisu Electric Equipment Co., Ltd. 2.South China University of Technology)
The load and volatile electricity of mining locomotives is frequently changes with poor working conditions. A maximum-torque slip frequency control method with maximum torque output and overload torque compensation and bus voltage compensation measures is proposed. A DC550V/ 300KW experimental prototype is developed. The simulation and experiment tets show that the drive system in the process of start-up and speeding with heavy loads has stable torque control effect and good dynamic response. The traction performance and reliability of the system is improved.
Electric Mine Locomotive; Maximum Torque; Slip Frequency
李保生,男,1967年生,高级工程师,学士,研究方向:工矿电机车研究设计。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:31
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
自动化博览(2014年6期)2014-02-28 22:32:16
河南科技(2014年23期)2014-02-27 14:19:00
河南科技(2014年11期)2014-02-27 14:17:15
