
用数码相机研究隧道洞外景物亮度*
2010-06-21 09:45孙春红陈仲林杨春宇
照明工程学报 2010年6期
孙春红 陈仲林 杨春宇
(重庆大学建筑城规学院,重庆 400045)
1 引言
公路隧道作为公路上特殊的构筑物,照明有其特殊性。白天隧道外亮度很高,当驾驶人员从高亮度的洞外进入到黑暗的隧道时,由于人眼的视觉适应特征,需要一定的适应时间。在隧道的入口段和过渡段需要有较高的照明亮度,保证视觉暗适应的顺利过渡,确保行车安全。在机动车交通量和设计行车速度一定的条件下,隧道照明系统的设计基准——洞外亮度L20(S)的取值大小将直接关系到入口段和过渡段亮度取值大小,也即决定了隧道照明节能、营运电费、工程投资和行车安全等。
在我国,隧道照明设计在选择L20参数时通常参考JTJ 026—1999《公路隧道照明设计规范》中隧道洞外亮度方面的有关条款,直接查表选择代表性特征的隧道洞外亮度L20值。或者用环境简图法计算洞外亮度值,环境简图法计算,需要知道隧道洞外环境中各种景物的表面亮度。 《公路隧道照明设计规范》中给出了各种典型景物的表面亮度参考值。但实际上隧道口各景物要素表面的亮度是随当地的光气候、季节、时刻、隧道朝向、景物表面的反射特征和反射系数等条件变化而变化的。设计规范中给出的隧道外景物表面亮度的参考值是非常粗略的。
要想更准确的获得隧道口景物亮度,可以用亮度计测量。亮度计测量环境亮度时,采用的是非接触测量方式,测得的是目标物某点的亮度值,这种测单个点参数的方法是比较精确的。但是亮度计测量存在定位误差和逐点测试时间长造成的在可变天然光环境条件的测试误差,导致最后测试值的不准确。
利用数码相机将被拍摄场景的亮度和色度信息以数字图像的形式输入Photoshop等数字图像处理软件等进行分析,最后获得被测路面的各测点处亮度值。这种测试方法大大弥补了常规方法的种种缺点,其优势体现在:1)清晰度高,而且从理论上可以得到微元面积上的亮度值;2)定位准确;3)测试时间短,大大降低测试危险;4)重复性好,通过计算机多次重现也不会改变。故采用数码相机快速近似测量隧道口的景物亮度是一种很好的测试方法。
2 数码相机测试景物亮度的色度学原理
在色度学的视亮度匹配试验中:将视场分为两半,一半为待测光,另一半为三原色R、G、B的光线,调节三原色光线的比例,当视场中的分界线消失,两边视场颜色相同时,待测光与三色混合色光达到颜色匹配,此时所需三原色的数量称三刺激值X、Y、Z。在色度学中我们用三刺激值中 Y的数值来代表亮度的数值。光的三刺激值与光的灰度值及R、G、B三个分量的关系可以用下式表达:

从上式可以看到,只要我们得到发光物体的色度R,G,B值,理论上就可以计算发光物体的三刺激值,也就能够得到它的亮度值。
数码相机中CCD传感器的光谱响应与CIE1931标准色度系统中的颜色匹配函数不相同,而且不同数码相机之间也有差别。因此,利用数码相机近似测量场景的亮度分布,关键是确定数码相机所采集的数字图像的灰度值 (Ir、Ig、Ib)与CIE1931标准色度系统中对应的色彩刺激值之间的关系式,即所谓数码相机光学特性化。特性化方法一般可分为两种:基于光谱响应的方法和基于目标色的方法。本文采用后一种特性化方法,即:使用摄影用标准灰板、色板作为参考目标色,同时对某一目标用数码相机拍照得到数字图像,同时对这一目标用BM-5A色度亮度计测量,读出 X、Y、Z值。由 Photoshop图像处理软件读取所采集的数字图像的灰度值 (Ir、Ig、Ib),并转化成图像上被研究的像素点对应的刺激值R′、G′、B′,再与色度亮度计测得的刺激值X、Y、Z进行比较分析,将数码相机光学特性化。
3 数码相机光学特征化实验研究
实验设备:佳能EOD-5D数码相机、符合国家标准《摄影用标准灰板、色板的技术规范》(GB3556-83)规定的灰板和色板、经过校准的BM-5色度亮度计
实验方法:将标准灰板、色板一起垂直置于脚架上。数码相机置于标准灰板和色板前方2m处,并保证数码相机的中心轴与色板灰板的中心基本在同一水平面上。亮度计置于数码相机旁边,使其与灰板、色板保持高度在同一水平面上。
测试条件:无遮挡的室外,典型的夏日晴天空。
3.1 数码相机曝光量对亮度再现线性范围的研究
线性记录亮度比范围通常由数码相机的动态范围来表示,数码相机的动态范围相当于胶卷的宽容度。佳能EOD-5D相机的动态范围为8.2EV,因此,该数码相机可以记录的最大亮度比可以甚至超过28,由于记录数据采用8bit的 jpg格式记录,因此其亮度记录范围甚至可以达到256∶1。但是令人遗憾的是,其亮度线性记录范围却远小于其动态范围的有效值。
因此,先根据通常的隧道口景物亮度的大致范围选择合适的数码相机的曝光参数,并对某些曝光参数下的亮度再现线性范围进行研究,最后确定本文研究的相机曝光参数。根据对重庆贵州的隧道口景物亮的实测,各种景物亮度值基本在500cd/m2~10000cd/m2之间。根据拍照曝光量和相机光圈对H-L′t的关系和实测的隧道口景物亮度值的范围确定夏日晴天空状态下用数码相机实测拍照时合适的曝光参数。
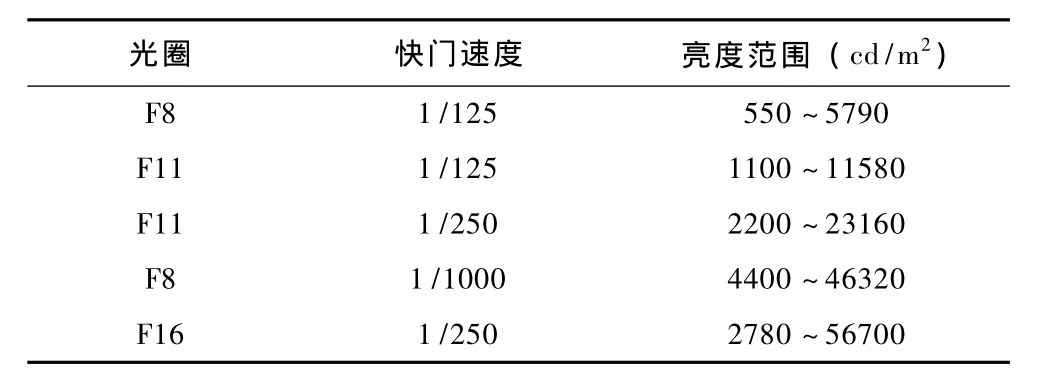
表1 不同曝光参数下的线性记录亮度范围
在相同曝光参数条件下,对不同天空条件下的标准灰板和色板拍照,并在拍照的同时对指定点亮度进行测试,然后提取图片上亮度测试点的灰度级进行线性回归分析,以观察其规律。通过对大量数据点进行回归分析发现:曝光量灰度值的对数值与亮度值的对数值具有较好的线性相关性 (见表1)。
根据不同曝光参数下的线性记录亮度范围和夏日晴天空状况时隧道口景物亮度的实测值的变化范围,在本文中,用F11、1/125曝光参数作为寻找相机光学特征和测试验证。
3.2 数码相机的光学特征表达式
测量时用亮度计读出光的三刺激值X、Y、Z及x、y,同时将拍摄的照片输入Photoshop图像处理软件,读出每块标准灰板或色板的灰度值Ir、Ig、Ib,记录在表中。多组记录数据进行分析,本文只选取了其中的一组 (见表2)

表2数码相机实验基础数据
将摄取的数字图像像素点的灰度值Ir、Ig、Ib转换成对应的刺激值R′、G′、B′。将表2中得到的实验基础数据去掉使回归系数出现复数等异常数据,由回归分析获得刺激值 R′、G′、B′与Ir、Ig、Ib之间的拟合结果如下:

拟合关系式的标准方差都较小,判定系数都在0.96以上,拟合效果较好。
在正常曝光条件下,用数码相机拍摄的数字图像的灰度D与曝光量H的对数成比例,并可用下式表示:

式中 v——数码相机CCD感光特性曲线的直线段斜率;
m——系数。
数码相机的CCD输出也遵循曝光量的定义,即曝光量H等于数码相机CCD面阵上照度E和曝光时间T的乘积

由光度测量系统中镜头成像研究表明:相机镜头后的像面照度由被测目标的亮度Lt确定,即

式中 τ——相机镜头的光学透射比;
F——相机拍摄时光圈。
由 (3)式和 (4)式得曝光量表达式,并代入(2)式后得上式整理后得被测目标的亮度


数码相机拍摄的数字图像的灰度D可用相应的三刺激值 R′、G′、B′表示

对于质量较好的数码相机而言,在正常曝光条件下反差系数v和相机镜头的光学透射比为常数,则设


式中 a、b、c、d、e——系数。
对于颜色的亮度变化产生的刺激程度主要取决于视网膜内的长波类型 (L型)视锥细胞和中波类型 (M型)视锥细胞,而对于短波类型 (S型)视锥细胞的贡献作用几乎可以忽略不计。为了便于计
当把式 (7)和式 (8)代入到 (6)式后可得算,所以可把上式简化成


式中 f、g、h——系数。
从光圈F为11、曝光时间为1/125秒和数码相机已调整好白平衡的实验数据中拟合后得f=0.0000107087,g=0.000058379,h=0.003720601;标准估计误差SEE为120.18cd/m2,判定系数R2为0.9893,拟合效果较好,
从表3中给出了利用数码相机获取的数字图像的灰度值和拟合关系式 (11)计算的色板和灰板的亮度值 (Lt)和测量亮度值 (L)。如以亮度实测值L为准,则相对误差均在±15%范围内,由计算结果表明:(11)式的亮度计算值和标准色板的亮度实测值吻合较好。故利用光学特征化之后的数码相
于是在指数函数的幂级数展开式中取前面2项整理后得机拍摄的数字图像可以较准确的计算出物体表面的实际亮度值。

表3 在不同亮度时标准灰板的亮度实测值和根据图片灰度值计算值的比较
4 用数码相机实测隧道洞外景物亮度
根据标准灰板和色板的实验测试找到的相机的光学特征表达式 (式11)是否能准确测量实际的隧道洞外的景物亮度,本文进行实测验证。
本文采用的方法是:选取了几种典型的隧道洞外景物,草丛、毛面花岗岩洞口端墙、岩壁、混凝土路面。用数码相机对隧道口景物进行现场拍照,同时用亮度计直接读取景物表面的亮度值。然后将实测的亮度值 (L)和从数码相机图片读取的灰度值用式 (11)进行计算后得到的亮度值 (Lt)进行比较,见表4。可以看出用数码相机图像系统得到的隧道口景物亮度与实测值的误差较小,可以用于隧道照明设计时隧道口景物亮度的测定。

表4 隧道口景物实测值和数码图像计算值对比
5 小结
比较实测数据和计算数据表明:将数码相机光学特征化之后,根据光学特征表达式可以用数码图片的灰度值较准确的计算出隧道洞外景物的表面亮度。
[1]公路隧道通风照明设计规范.(JTJ026.1—1999).
[2]顾冰,詹庆旋等.利用数码相机测量亮度分布的实验.照明工程学报.2003年第1期.
[3]朱小清.照明技术手册.北京:机械工业出版社,1995年11月.
[4]沈天行,王立雄.利用“原色漂移量调整法”校准数字图像色度值.第九届全国建筑物理学术会议论文集(二),2004,115~117.
[5]徐枫.摄影手册.北京:中国摄影出版社,1983.
[6]沈天行,杜江涛.城市夜景照明的测试技术.国际夜景照明研讨会,2001,上海,138~143.
[7]熊凯.基于颜色视觉诱发电位的色觉缺陷研究.博士学位论文,浙江大学信息学院,2005.6.
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
上海建材(2021年1期)2021-11-22
中国交通信息化(2020年2期)2021-01-14
中国科技纵横(2019年5期)2019-04-24
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26
中华建设科技(2017年3期)2017-05-05
中国市场(2016年45期)2016-05-17
爱你(2015年4期)2015-11-15
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
爱你·健康读本(2015年2期)2015-04-09
