
复杂诊断系统的MAS协作求解方法
2010-06-11 06:30:24蒋伟进曹东波许宇晖史德嘉
电信科学 2010年10期
蒋伟进 ,曹东波 ,许宇晖 ,史德嘉
(1.武汉理工大学计算机学院 武汉 430070;2.湖南商学院计算机应用研究所 长沙 410205)
1 引言
随着工业过程的大规模化和生产装置的复杂化,传统控制理论和控制技术正面临着工业过程控制的复杂性带来的严峻挑战。复杂过程与一般工业过程有着本质区别:①关系变量众多。复杂过程生产规模大,工艺流程长,使得过程的影响因素繁多,并且随着检测仪表、集散控制系统的成熟和发展,工业过程可得到的信息量越来越多,从而为过程的模型化研究带来了难题。②过程复杂。复杂过程的诊断机理复杂,常常伴随着物理反应、生化反应、相变反应及物质和能量的转化与传递过程(固、液、气三相共存),而且存在不同程度的非线性和时滞等特性,难以建立精确的数学模型。③过程不确定性因素复杂。复杂过程的生产环境和生产条件一般十分恶劣,如高温、高压、强碱,甚至是易燃易爆或存在有毒物质,导致生产过程中的一些工艺参数如温度、流量、成份等难以实时准确检测,并且在检测数据中往往有大量的噪声、干扰和误差;还有,环境的动态变化,如生产原料成份不稳定和生产边界条件剧烈波动等,以及一些过程重要的生产指标无法直接测量引起的过程信息未知性和不完全性等因素也造成了工业过程的不确定。④过程关联耦合严重。复杂过程中含有许多相互耦合、交互作用严重的变量,一个操作变量的改变会同时引起多个被控变量的改变。⑤过程信息的多样化。在实际复杂生产过程中,一方面由于自动控制系统的广泛应用,保存了大量的实际生产数据;另一方面由于工程技术人员长期与生产过程接触获得了许多生产过程的经验性知识,因此在复杂过程中包含有大量的定量、半定量和定性等多种模式的信息。
在复杂环境下,系统面对的不仅是传统的空间分布性、慢变或时变参数等情况,而且要面对许多新的问题,如系统错误、子系统状态改变、传感器和调节器失败、外部干扰和参数变化甚至混杂系统,工业过程再采用以往针对连续过程采用的相对简单局部的常规控制策略已不能满足生产过程的需要,而采用传统的集中方式使整个控制和诊断系统异常复杂,难以实现。另一方面,控制系统的监视、控制和诊断子系统相互依赖、相互作用,是一有机的整体,存在内在的集成要求。随着各种智能技术的发展,需要实现整个生产过程的信息集成,即把企业经营决策、管理、计划、调度、过程优化、故障诊断、现场控制紧密联系在一起,这对监控系统的控制与诊断系统的集成提出了更高的要求,因此我们必须研究新的、面向复杂工业生产过程的集成控制体系结构与实现技术[1,2]。
智能故障诊断模型中的“智能化”主要体现在诊断过程中结合领域知识和人工智能技术在对故障信号进行检测与处理的基础上进行诊断。目前研究较多的主要有4种智能故障诊断模型:基于规则的故障诊断、基于实例的故障诊断、基于模糊方法的故障诊断和基于神经网络的故障诊断,但这些模型都存在不同的缺陷,基于此类智能技术的故障诊断已难以满足复杂过程诊断的全部任务要求。因此,虽然已有将多种不同的智能诊断技术结合起来的混合诊断系统,如基于规则的专家系统与神经网络结合,案例推理与神经网络和基于规则的系统结合,模糊逻辑与神经网络结合等。但由于这些模型固有理论基础的局限性,许多问题如模糊逻辑与神经网络的组合机理、组合实现算法、便于神经网络处理的模糊知识和表达方式等也还有待研究。
Agent方法与技术研究的兴起与发展,为解决上述问题提供了新的手段[3~6]。Agent是一种建立在分布式计算范例基础上的智能手段的集成方法,其目标是为其功能实体获得最大的利益,多Agent系统(multi agent system,MAS)通过对问题域的描述、分解和分配,构成分散的、面向特定问题相对简单的子系统,并协调各系统并行和相互协作地进行问题求解,其思想十分适合大规模复杂问题的智能求解(problem solving)。对于一个动态的、分布的、实时的和不确定的复杂系统,多Agent系统在故障的分辨、诊断和控制方面表现出了极大的优势。近年来许多学者对这一领域已作了深入的研究。Shahbazian等[1]设计了基于“黑板和知识库系统”体系结构的智能诊断系统。Jennings[2]提出了将两个孤立的专家诊断系统转变为一个多智能体系统环境GRATE。Jennings和Draa等分别利用智能体的联合意图实现了联合监控机制[3,4]。Hartvigsen[5]将多智能体技术应用于暴风雨气象观测和系统监测。Russell[6]利用智能体技术建立了用于复杂问题实时诊断的分布式系统MARVEC。Zhang等[7]应用智能体理论实现了双臂协作装配,设计出相应的开发工具和传感、执行系统结构。Hu等[8]设计了PLMAS模块,通过使用分布式智能体技术实现各影响因素和决策推理目标的协调。Daniel等[9]研究了智能体与黑板模型的交互形式,据此提出通用控制模型。Grosz和Kraus从高层认知状态的观点对多个Agent的规划与协作进行了研究,并提出了SharedPlan的模型,其中对行动、行动的方案、能力和意图等概念进行了刻画[10]。J de Visser等人研究了通过集成规划、执行、行为监控和再规划等方法来处理不确定的快速变化的事件和状态[11]。Subbu等人建立了一个动态环境下的多Agent协作模型,研究了以分布式共同进化算法来解决一些控制问题[12]。参考文献[13]提出了基于多Agent和BP网络的动态故障诊断模型,参考文献[14]结合遗传算法和多MAS设计了一种分布式实时任务调度算法,参考文献[15]建立了一种Agent诊断系统结构并实现了一个原型系统。本文在上述工作的基础上,针对复杂工业过程生产监控的特性和要求,对诊断问题任务辨识分解,各Agent的内部诊断机制,多Agent间的交互、协作及关联模型,诊断决策问题进行研究,建立一个基于MAS的分布式智能控制和故障诊断系统。该方法依据监控信号、监控对象的结构等特征将传统的多故障综合诊断化为面向领域的对象的多Agent模块诊断,诊断机制更加灵活、准确而且易于修改扩充。
2 诊断系统的MAS结构
2.1 系统的工作过程
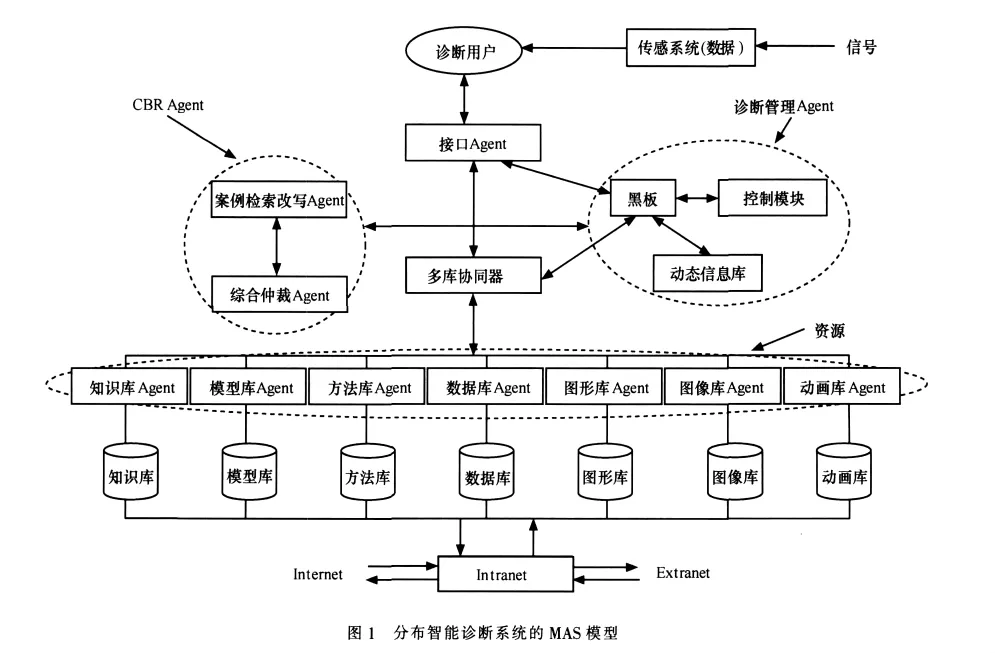
我们设计的故障诊断系统MAS结构模型如图1所示。其工作流程为:当出现故障时,诊断用户首先完成基于案例的故障特征抽取,通过接口Agent完成问题的描述,交给CBR Agent开始诊断分析和诊断支持。CBR Agent完成相似案例的检索,并辅助诊断用户把相似案例的解改写到当前问题中,经合成形成当前问题的解建议(初始观点),同时将问题的初始观点发送给诊断管理Agent。此过程中,由多库协同器调度各资源Agent,完成诊断过程所需的数据、模型、方法、图形、图像等的调用。诊断管理Agent收集各群体诊断成员的观点,并提交各诊断者参考,辅助诊断用户集成来自不同思维角度的求解设想,以便得到一些启发,开始修正和补充初始观点的诊断支持过程。
多库协同器是在各库管理系统的基础上,对各库进行总体控制,协调调度,相互通信,实现资源共享、协同运行的软件系统。多库协同器调度各资源Agent,进行诊断过程所需的数据、模型、方法、图形、图像等的调用。它主要完成两方面的任务:根据诊断用户的学习目标制定学习计划,并执行学习计划为诊断用户提供所需的信息和知识。它采用目标驱动学习机制,根据不同的目标采取不同的学习策略,实现对知识库、模型库、方法库、数据库、图形库等的调度。多库协同器采用多个Agent分别完成总控、协调、调度、通信等功能。
2.2 诊断Agent功能结构
诊断结构如图2所示,采用慎思(deliberate)与反应(reaction)相结合的混合结构[13,14],Agent的基本结构分为两个部分,一个是领域层,一个是协作控制层。在刺激反应部分中,感知器和执行器被紧密地结合在一起,Agent识别某一种情形,立即执行与这种情形相关的已经编译好的程序,Agent在面临相同的情形时,往往执行同样的动作。而审慎部分通过基于模板的匹配和符合操作的逻辑推理作出决策。Agent模型由通信接口功能组(目标模块、任务分解模块、计划决策模块、执行模块、算法和功能管理模块)、信念知识库、本地知识库、数据库、算法库和内部功能块组成。在不同层次有不同的输入/输出数据,根据通信对象使用不同协议。对于实时控制Agent,多个任务可对应于不同模型和控制算法,可根据不同情况进行多模切换。越往下层,实时性越高,以反应结构为主,反之慎思比例越大。在高层强调Agent的自主性,自主型的Agent能够通过机器学习,或者在其运行中,与其他交互更为理性地收集信息,使其在工作的过程中知识不断增加,能力不断增强,具有更高的智能。整个系统强调Agent的实时性,周期地响应环境的变化,每一个Agent都有一个最终执行期限和周期使它能工作在强实时环境中。
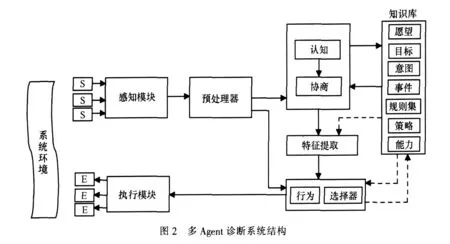
感知模块通过一组感知器选择性地感知外部环境,接收来自外部环境中其他Agent的信息(通知、请求等)。执行模块将输出信号转化为受动器所需的格式,由受动器将信息发送到外部环境中的Agent。预处理模块根据感知模块所得到的任务的优先级和到来时间等特征来决定任务是通过Reactive部分(ω1类)处理,或是通过Deliberative部分(ω2类)处理,这个问题就变为一个两类的分类问题。Agent知识库是Agent活动的依据,也是向外界承诺的基础。即研究如何用符号表示复杂现实世界中的Agent以及Agent如何根据各种信息对环境进行推理和决策。特征提取模块将知识库中的模型加以简化,简化的模型更加局域化,许多不相关的细节被去除。细节的相关性基于刺激反应部分当前的目标和状态。刺激反应部分由选择器模块和行为模块两个模块组成。选择器模块的工作是在前述所得到的简化模型的基础上得到一个高层逻辑条件来驱动行为模块。行为模块实际上是一个有限状态机。审慎部分由识别模块和协商模块组成。Agent的审慎部分监测Agent所在环境,更新知识库中的信念,利用规则集中的规则识别环境中发生的事件并产生执行某项动作的愿望。Agent的愿望和意图,权衡相互冲突的各个动作。由协商模块协商Agent的愿望和意图。
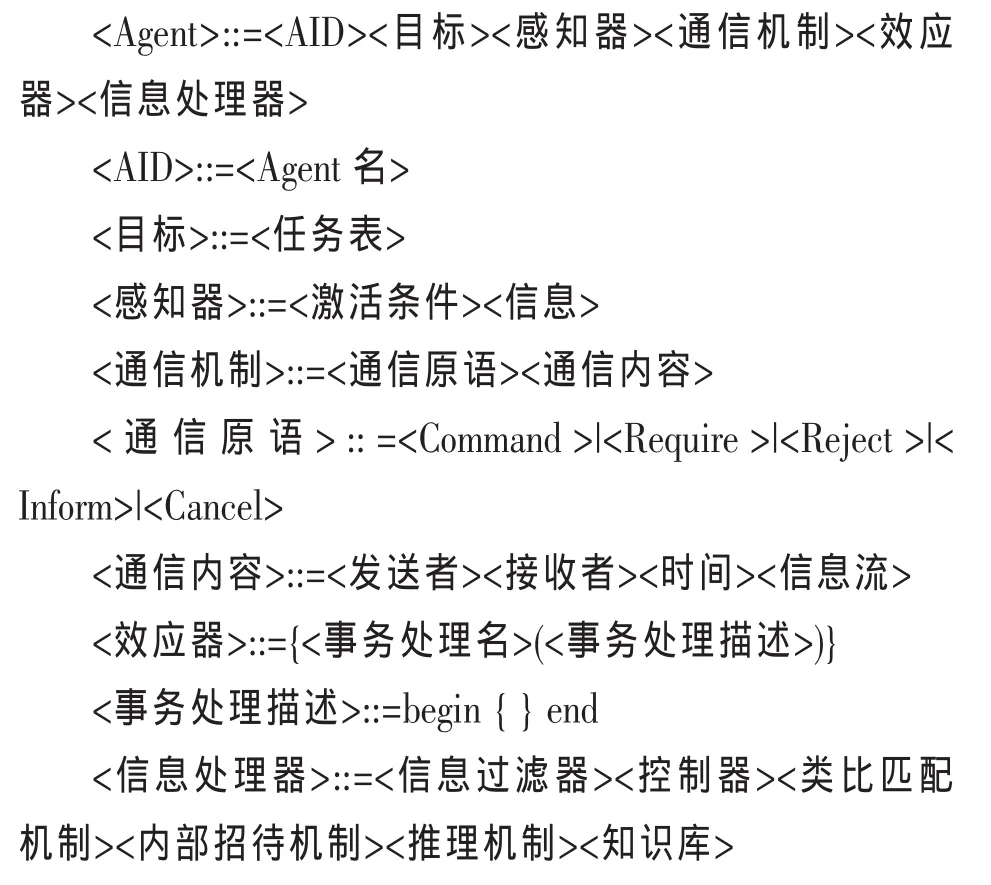
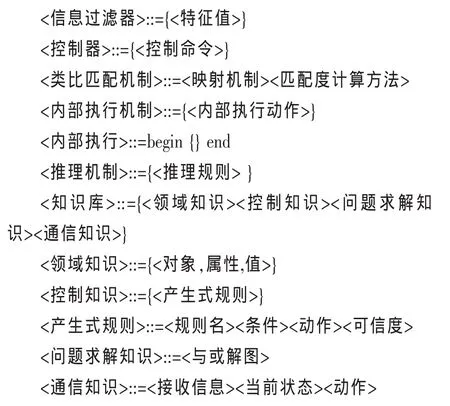
在模型的具体实现中,Agent由目标、感知器、通信机制、效应器和信息处理器等几部分组成,有时会有些增删。目标以任务表的形式来表示,初始由用户静态建立,然后通过相互通信而动态地改变;任务表中指明Agent必须做的事即可,任务的实现由效应器及与其他Agent合作的形式来完成;通信部分由通信原语及通信内容组成,用来发送任务,表达各Agent对任务的态度及传递被处理的信息;感知器表示Agent的感知能力,当触发条件被满足时,客观存在被激活并接收外部信号/信息流;效应器的功能是执行动作行为。Agent的结构表示如下:
本模型将思考型Agent和反应型Agent两者相结合,充分发挥了两者的优点,使得基于该模型的系统既具有较强的灵活性和快速响应性,又具有较高的智能。
3 MAS协作方法
在MAS中,多Agent协同协作的基本目的是使参与协作的Agent各尽所能,充分利用网络中的分布资源,因此要将协同任务进行分解,将分解后的子任务分配给合适的Agent求解,这是实现协同的一个重要问题,其关键技术是选择何种任务调度算法。在网络中,任务与资源的组合随子任务的增加呈指数增长,在实际的协调设计中,还需兼顾到实时性,因此不能盲目搜索算法。当搜索空间过大时,不宜使用启发式搜索方法。处理问题具有柔性和并行处理能力的遗传算法可以在较大的状态空间中随机高效地采样、搜索,很快逼近最优解,故该算法适合作为子任务分配的调度算法[15]。
按照生命周期划分,协作过程可分为:协作任务提出、协作任务分解(将各子任务分配给各个Agent或者Agent群体)、多个Agent并行求解、各子任务集成等部分。
任务分配不仅是MAS中研究的问题,而且也是分布式问题求解中研究的问题,但由于Agent自身能力和任务复杂度等原因,使任务分解变得非常复杂。有一种在多Agent系统中基于物理学的任务分配机制,该机制减少了分配过程中的协商和通信开销。因为在多Agent存在的环境中,如果依靠传统方法中的协商、协调机制,将导致系统难以完成一个任务的求解。
对一个整体的协作任务进行需求遍历,形成一棵遍历树或图的结构,对于子任务的划分,每个结点固然可以分为一个子任务,处于同一代结点应划分为不同的子任务,以便于并行求解,而位于同一枝蔓上的结点(如父子结点)则可划分为同一任务,但应作出标记,既有利于并行求解,也便于求解过程中的进一步交叉和选择。任务分解也可以采取一种在竞争有限资源中的Agent之间进行任务分配的分布式市场协议系统,这种方法将分解和分配集于一体,拍卖仲裁者负责资源的拍卖,各类Agent对所需的资源进行竞价。Agent以拍卖协议确定的价格进行任务和资源的交易,通过指定拍卖机制中一组简单的竞价策略,达到期望的收敛特性。
在多个Agent并行求解中我们结合遗传算法来实现,遗传算法适应度函数用来区分群体中个体(问题的解)的好坏。这里我们给出Agent置信度的概念。系统中,每个Agent都有自己的求解空间,具有独立的属性、方法和知识,容器记录了各主体的求解过程,各主体通过容器的上下文对象联系,每个Agent最终给出问题的求解的向量,需要一个综合评判方法来综合各求解结果,这样最终的结果与各Agent的求解结果都存在一定的偏差,Agent求解结果的偏差越大,说明Agent的置信度越低,反之越高,我们用c(Agent i)表示Agent i的置信度。鉴于此,首先使用大量的训练样本(任务),分别由容器中各Agent完成,开始每个 Agent的 c(Agent i)相同,根据训练结果调整c(Agent i)的值。训练过程可以采用神经网络算法,最终确定各Agent的置信度。鉴于遗传算法对适应度函数的惟一要求是该函数不能为负。由于置信度本身反映的就是Agent的可靠程度,又满足非负的要求,故我们取Agent i的适应度函数为 f(i)=c(Agent i),容器的上下文对象负责记录各Agent的适应度函数,并在Agent的任务执行过程中,每隔时间段T,监控各Agent的资源占有情况以及执行进行度重新评估适应度函数。如果Agent i按照合同进度执行,则有:f(i)=f(i)+f(k),n为协作 Agent的数目,M为权重系数,取值根据实际情况而定,一般取M≥n;同理,如果Agent i不能得到需要资源或者任务完成进度缓慢,则调整 f(i)。f(i)=f(i)f(k)。
在多Agent协调的任务调度中,基因值为一个主体,每个染色体是一个有一定顺序的列表。
假设 k 个 Agent的编号分别为 a1,a2,…,ak(k≤m)。m个任务要分配给k个Agent,要说明的是,有时几个任务可以分配给一个Agent,所以不一定用到所有的Agent。各个任务 μi(i=1,2,…,n)所分配给各个 Agent的编号的顺序排列就构成该问题的染色体编码,即我们所用的是等长度的字符编码方法。例如a3 a8 a1… a3 a1一共是m个,这代表一个分配方案(群体中的一个个体),表示将第1、m-1件任务分配给a3,第2、4、m件任务分配给a1,第3件任务分配给a8等。初始群体可以由a1,a2,… ak的随机排列产生。由个体染色体编码串可统计出某一分配方案用了多少个Agent。
多个Agent在获得子任务后,每个ai Agent进行独立求解,并在确定的时间间隔内定期通信和交互,然后采用选择、交叉、变异等遗传算子,重新分配子任务及任务的下一级,以进行求解。例如:子任务u1分配给Agent1,u1可以细分为{v1,v2,…,vi},Agent1 在解决完 vi与 Agentj通信后将下一级子任务交叉重新选择,在这个过程中逐渐形成了适应的最优解。
下面给出MAS协调推理算法和生成一个动作的过程。
算法1 协调推理算法MAS-Co(OPS,CaS,I,G)
输入:所有动作模块的集合OPS,所有Agent的能力集合 CaS,当前环境状态I,目标 G
输出:协作行为规划
Step 1通知所有Agent规划开始,并等待所有Agent执行完当前动作后进入规划状态。
Step 2 初始化,建立初始规划 ψ=
Step 3 调用递归算法 φ=Generate-Next-Step(ψ,GS),表示愿望的确定过程。包括两方面:一是递归的发现更具体的愿望,即子目标的形成;二是保证愿望与信念、意图的一致。
Step 4规划生效。对于规划中有其他Agent参与的动作与有其他Agent有关的约束,通知相应的Agent。表示意图的选择、确定过程,这里有三种可能;放弃不可达成或不相容的意图;保持未证明不可达或不相容的意图;加入新的意图。
Step 5通知所有Agent规划结束,所有Agent继续执行自己的任务。表示Agent的执行过程。
Step 6如果成功,则返回φ,否则失败退出。
算法2生成一个动作步骤Generate-Next-Step(ψ,GS)
输入:当前的规划ψ,当前的子目标集合GS
输出:添加一个新动作步骤后的规划φ
Step 1终止条件。如果GS为空,则算法成功,返回。
Step 2选择子目标。从GS中选择一个子目标
Step 3选择动作。从已有动作集合SO中选择一个已有动作,或者从动作模块集合OPS中选择一个新动作,将该动作记为H,使得埚e∈EH且 MGU(e,g)≠⊥,如果没有符合条件的动作,那么失败退出。
Step 4 使动作生效,令 ψ′=
SO ′=SO ∪{H},OO′=OO ∪{H 刍A},CS∪MGU(e,g),CLS′=GLS∪{
Step 5子目标生成,如果H埸SO,则对每个p∈PHCS′,向 CS’中加入
Step 6冲突的检测与消解。将规划中新加入的因果链
(a)升级。U刍A。
(b)降级。A刍E。
(c)分离。在现有自由变量上选择约束β使得MGU(e,劭pu)≠⊥。
(d)加入修复。向 CS’中加入
Step 7约束一致性判断,设步骤6中选择的约束为c,调用约束一致性判断算法Consistent(c),若返回True,说明c与 CS’一致,将 c加入到 OO’或 CS’中;若返回 False,说明c与CS’不一致,需要选择其他约束来消解冲突。
Step 8 递归。调用 φ=Generate-Next-Step(ψ,GS),如果成功,返回φ,否则失败退出。
4 MAS诊断决策机制
下面以诊断Agent内部的运行决策为例,说明决策仿真过程。
设监控客体是系统中被监控的对象,每个监控客体对应1个诊断Agent,完成对它的监控和诊断任务。
监控客体的工作状态表示为它能够继续工作的可能性的量度,是其工作状态特征值s在工作状态语言变量上的一种模糊映射,表示为 β:s→Γ(s),其中 s为应用 Agent发生的所有故障的可信度与其权重乘积之和;Γ(s)=
监控客体间的状态耦合是监控客体间不确定工作状态变量的关联度描述。
采用概率表示,设系统共分解为n个监控客体,对应n个诊断Agent,则有n种工作状态的描述x1,x2,…,xn,第i个监控客体受其他(n-1)个监控客体的影响而获得的工作状态的概率置信值为pr(xi)=pr(xi|x1,x2,…,xi-1,xi+1,…,xn)。系统的总体工作状态的描述为y,其概率置信值为pr(y)=pr(y|x1,x2,…,xn)。
4.1 Agent内部的诊断与决策
在诊断Agent内部,需要完成2个方面的工作:首先,根据实时采集到的征兆信息,诊断出监控客体可能发生的故障,并对该监控客体的工作状态做出评估;然后,基于实时征兆信息做出操作决策。
定义3类状态结点:征兆结点S、故障结点F及中间结点M。S是由原始数据获取的特征信息;F表示系统中的物理构件,是诊断搜索的初始状态、原因等;M是一种无形结点,它是联系相关征兆结点和故障结点的桥梁。
诊断问题是在已知一组征兆S的情况下,对各种假设故障F的似然率的估计。在已知pr(F)、pr(M/F)、pr(S/M)。的情况下,诊断问题就是根据征兆结点S的信息来估计概率pr(F/S)。应用Agent的操作决策是根据可观测征兆从控制策略中选择适当的决策,使任意时刻监控客体状态趋向最佳,它取决于应用Agent的故障状态和控制策略。
4.2 应用Agent运行决策
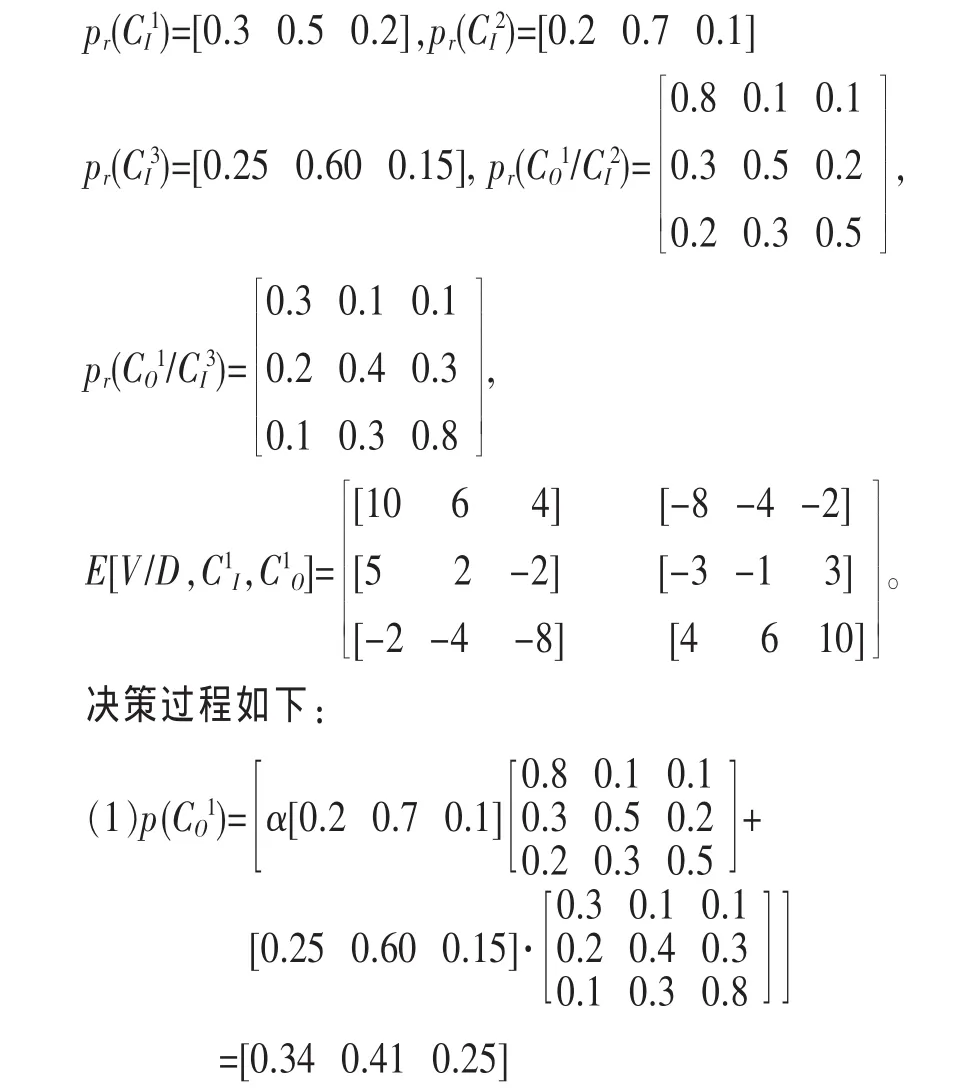
应用Agent的运行决策建立在其负责的监控客体内部工作状态以及其他监控客体工作状态综合影响作用的基础上。由此定义2类工作状态结点:内因引起的工作状态结点CI和外因引起的工作状态结点CO。整个决策过程算法如下。
(1)吸收CO的所有前序结点进CiO后,对应的计算为:

(2)删除 CiO后,对应的计算为 E[V/D,CiI]=E[V/D,CiI,CiO]×pr(CiO)。
4.3 系统Agent全局运行决策
系统Agent的全局运行决策是基于多个应用Agent的局部运行决策所形成的决策空间,对它们进行协调处理而对整个系统做出的比较优决策。整个系统工作状态结点C表示,系统全局决策结点D表示,整个决策过程的算法如下。
(1)吸收C的所有前序结点C后,对应的计算为:

设在各Agent评估出监控客体工作状态的基础上,进行换线机器人Agent内部的运行决策。
已知工作状态结点:工作状态={好,中,差};决策结点:决策策略={继续运行,脱离系统}。
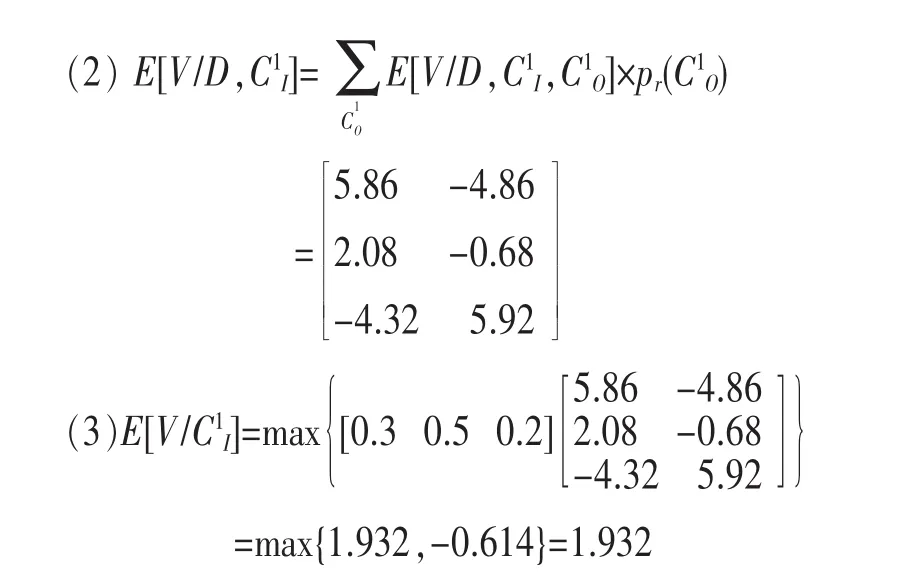
即决策策略={继续运行,脱离系统}的效用期望值为E[V/C1I]={1.932,-0.614},所以应采用决策{继续运行}。
5 应用分析
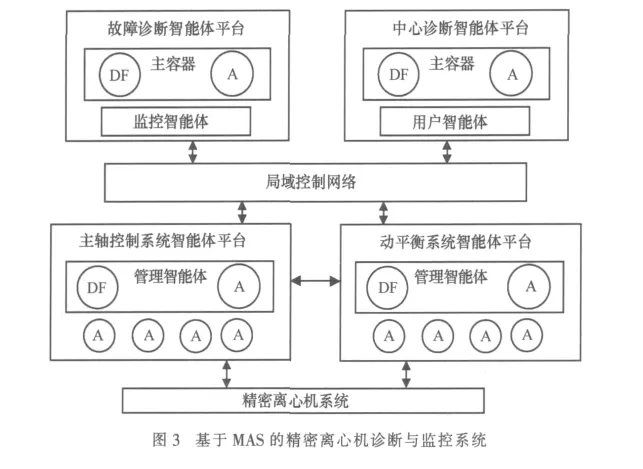
根据上述方法开发的原型系统应用于精密离心机系统,实现了精密离心机故障诊断与监控系统,如图3所示。该系统能够完成诊断测试任务,并达到要求的性能指标,整个系统在系统维护、实时故障诊断和监控能力上有了较大的提高。精密离心机系统属于大型机电系统,分别由动态半径及失准角测量系统、温度控制系统、主轴控制系统、动平衡系统、鸟笼控制系统、中心监控系统等组成。由于目前在精密离心机中各子系统都是独立的计算机系统并且功能相对独立,因此,我们采用一机一MAS结构,即把每个子系统作为一个MAS,根据诊断对象和诊断功能需求,诊断智能体被设计并配置在各MAS平台中,所有子系统最终通过100 Mbit/s网络交换机组成了精密离心机多智能体故障诊断与监控系统。
精密离心机工作在高速旋转状态,为了人员和设备的安全,整个离心机被放在密闭的钢结构的保护罩中,中心监控智能体平台和故障诊断Agent平台上的用户智能体就可以实现对上述各子系统的远程控制,发送控制指令。用户可以通过用户智能体提出的新的诊断任务传送给监控智能体,然后经过任务分解,发送到诊断智能体去执行。监控智能体把最终诊断结果通过用户智能体以图形界面形式,直观地显示给用户。
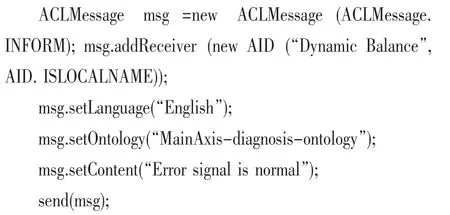
诊断智能体的运作流程为:该诊断智能体具有某个初始内部功能状态f0(f0∈F),在某时刻,诊断智能体通过观察外部环境得到视觉状态see(si)(si∈S),它将该视觉状态结合此时的功能状态f0进行思考和推理,从而修正功能状态得到diagnosis(f0.see(si)),然后根据该修正后的功能状态决定诊断对象期望达到的目标的最终状态模式result(diagnosis(f0.see(si)))。当一个智能体向另一个智能体发送消息时,首先定义一个ACLMessage对象msg,然后赋值,最后调用Agent类的send()方法。下面代码说明了主轴诊断智能体向动平衡智能体发送一条关于控制误差信号的诊断结果的消息。
实验时,人为设置了3种不同类型故障进行模拟实验,即转子不平衡、转子不对中及转子零件松动,再加入设备无故障情形,共4种模式。通过速度和加速度传感器,分别测试转子在各种故障状况下的参数值,利用梯形函数,得到各故障模式特征值的隶属函数,进一步计算出每种传感器对各故障模式的信度函数值分配(各故障模式为真的可信程度),如表1所示,具体的信号处理过程见参考文献[7]。对此数据利用模糊融合诊断Agent[8]和本文的融合诊断Agent,分别进行诊断处理,利用最大信度函数原则判断故障类型,结果见1。其中,模糊融合时两种传感器的权重各为0.5。
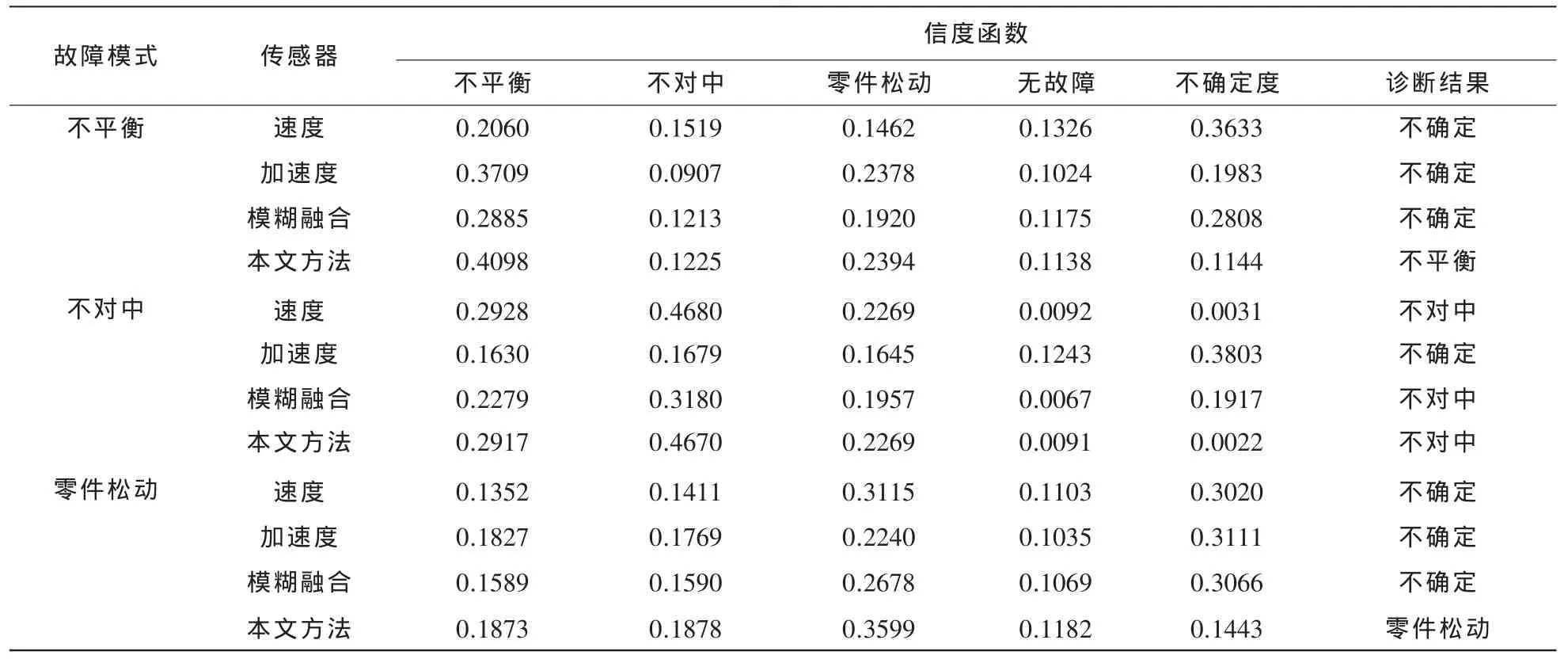
表1 诊断Agent实验结果
对表1可以从两方面分析其含义:①多传感器融合诊断与单传感器诊断相比故障诊断准确率明显提高,这主要是融合后实际故障的信度函数值明显增大,特别是本文Agent诊断方法;②模糊融合诊断Agent和本文诊断Agent,在有些情况下诊断结果是一致的,如转子不对中,此时可直接得出转子不对中的故障模式,并将数据传送给管理Agent,输出诊断结果。在另一些情况下,诊断结果是不一致的,如不平衡和零件松动故障,此时将两者的诊断数据全部传送给管理Agent,综合仲裁Agent会根据不同情形作出不同处理,对此种模糊Agent结果为 “不确定”,而本文Agent能识别故障模式的情况,选取本文 Agent结论为诊断结果输出。如果两种诊断相互矛盾,综合仲裁Agent则需向其他诊断Agent发出协作诊断请求,并提出原始的数据,最后综合所有诊断Agent的结果,作出最终结论,达到Agent协作诊断的目的。
6 结束语
对于动态多变环境下的复杂问题决策,如分布式故障诊断系统领域,由于因果关系复杂,而信息具有随机性、模糊性等不确定性,其知识难以表达,因果关系难以把握等,本文在以往智能诊断方法的基础上,应用Agent及相关智能技术,提出了一种基于多Agent系统的分布式智能诊断决策模型,该模型由多个分布于不同区域的Agent工作组成,是一个分布式远程多Agent诊断系统,克服了传统的基于规则推理系统的知识难于获取和推理的脆弱性等缺陷。在精密离心机故障诊断与监控系统中,该模型能快速、准确地进行故障成因分析,给出合理的、建设性的决策意见,取得了与专家相似的诊断结果,提高了系统的安全运行效率。另外,由于采用了工业现场广泛使用的CAN总线,因此可以很方便地应用于连续工业生产,构成大型分布式远程故障监测与维护系统。
1 Shahbazain E,etal.Multi-agentdata fusion workstation architecture. SPIE-the International Society for Optical Engineering,1998(3376):60~68
2 Jennigngs N R,Vargs L Z,Aarnts R P.Transforming standalone expert systems into a community of cooperating agents.Engineering Application Artificial Intelligence,1993,6(4):317~331
3 JenningsN R.Controlling cooperative problem solving in industrialmultiage systemsusing jointintentions.Artificial Intelligence,1995,75(2):195~240
4 Draa B C,Millot P.A framework for cooperative work:an approach based on the intentionality.Artificial Intelligence in Engineering,1990,5(4):199~205
5 Hartvigsen G,Johansen D.Cooperation in a distributed artificial intelligence environment-the storm cast application.Engineering Application of Artificial Intelligence,1990,3(3):229~237
6 RussellS J.Provablybounded optimalagents.Journalof Artificial Intelligence Research,1995,23(2):575~609
7 Zhang J,Collani Y V.An interactive assembly by a two-arm agent.Robotic and Autonomous Systems,1999,29(12):91~100
8 Hu Wenbing,WangShaomei.Study on logisticsdecision supported system based on multi-agent.In:The 8th International Conference on Computer Supported Cooperative Work in Design,Xiamen,China,2004
9 Daniel D C.Collaborating software blackboard and multi-agent systems&the future.In:Proceedings of the International Lisp Conference,New York,October 2003
10 Grosz B J.Kraus S.Collaborative plans for complex group action.Artificial Intelligence,1996,86(2):269~357
11 De Visser J,Wieringa P A,Moss J,et al.Supporting distributed planning in a dynamic environment:an observational study in operating room management.In:Proc of the 21st European Conference on Human Decision Making and Control,Glasgow,Scotland,2002
12 Subbu R,Sanderson A C.Network based distributed planning fordesign and manufacturing.In:Proc ofthe 4th IEEE International Symposium on Assembly and Task Planning Soft Research Park,Fukuoka,Japan,2001
13 Jiang Weijin.Research on distributed diagnoses method based on MAS.ACTA Electronica Sinica,2004,32(12A):235~237
14 Jiang Weijin.Research and implementation of distributed MSP algorithm based on GA&MAS.Computer Science,2002,29(9):443~447
15 Jiang Weijin,Xu Yusheng.Research on diagnosis model distributed intelligence and keytechnique based on MAS.Journal of Control Theory&Applications,2004,20(6):231~236
16 朱孟潇,宋志伟,蔡庆生.一个基于模拟退火的多主体模型及其应用.软件学报,2004,15(4):537~544
17 刘贵全,陈小平,范焱等.多主体协作系统的一种形式模型.计算机学报,2001,24(5):529~535
18 刘波,李伟,罗军舟等.网络管理中多Agent的半在线调度算法.计算机研究与发展,2006,43(4):571~578
猜你喜欢
纺织科学研究(2021年9期)2021-10-14 08:52:10
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:34
数学物理学报(2018年1期)2018-03-26 08:16:42
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48
电子设计工程(2014年12期)2014-02-27 11:58:23
苏州市职业大学学报(2010年1期)2010-01-29 02:26:40
科技经济市场(2006年6期)2003-03-17 01:51:26
