
基于嵌入式模拟器的路径询优算法的实现
2010-06-05 10:47来炳恒
电子设计工程 2010年9期
赵 佳,胡 燕,来炳恒,王 瑞
(西安建筑科技大学 信息与控制工程学院,陕西 西安710055)
在地理信息系统中,最优路径是一个很重要的问题。快速求解道路网两节点间的最短路径,应考虑道路网本身的特点。在图论中求解最短路径最著名的是Dijkstra算法[1]。该算法是基于图论中的网络模型,在求解时有可能并准备搜索所有的网络节点,算法的时间复杂度为O(N2),N为网络节点数。显然,在拥有大量节点的城市道路网中,该算法运算量太大,难以满足用户要求。从几何学中知道,两点间线段最短。在道路网图中,从起点开始,如果每次取与终点直线距离最短的节点为新的节点开始搜索,则这条路径是最短路径的可能性也较大。本文采用A*搜索算法,充分考虑当前搜索点与终点间距离所带来的影响。实验表明,引入这个因子后,算法搜索空间小,求解速度快。
1 嵌入式模拟器
嵌入式平台构建于微软的Windows CE系列操作系统之上,微软按主要智能设备、自身硬件设备特性的不同以及用户体验的差异,定制出了Windows CE.NET 4.x系列操作系统的两个主要分支,分别安装在不同的嵌入式硬件设备中,从而也就构成了我们通常所说的Pocket PC和Smartphone。Pocket PC最大的特点是将熟悉的 Windows桌面扩展到了移动设备中,这使得基于嵌入式的电子地图系统更方便普通用户的使用。
为正确实现路径询优算法,系统需安装eMbedded Visual C++4.0,Microsoft Pocket PC 2003 SDK.msi,Pocket PC 2003 SDK Chinese Simplified Emulation Images.msi等辅助开发软件[2]。在模拟器上部署Pocket PC应用程序,并在模拟器上安装Microsoft.NET Compact Framework,接着会下载并启动智能应用程序×.exe。
2 A*算法
A*算法[3]是人工智能中一种典型的启发式搜索算法,通过在状态空间中的搜索,对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。启发中的估价是用估价函数表示的,如: f(n)=g(n)+h(n)。 其中 f(n)是节点n的估价函数,g(n)是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。g(n)是已知的,它代表了搜索广度的优先趋势。当h(n)远大于 g(n)时,可以省略 g(n),而提高效率。
3 算法设计与实现
数字电子地图采用MapInfo公司提供的电子地图数据格式。每张单独的地图都被表示成单独的一个图层,所有的图层存储在layers集合中,如图1所示。
Layers[4]合由Layer对象组成,按顺序编号为0到n。Layer对象由features对象组成,features对象又是由Feature对象组成,对应于地图中的点、线、区域或符号。最上面一层为Layers(1),Layers(2)位于 Layers(1)的下面,以次类推。 最下面的图层最先绘制,最上面的图层最后绘制。
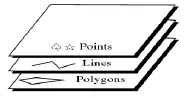
图1 地图数据组织结构Fig.1 Framewok of map data organization
3.1 建立地图的拓扑结构
在MapInfo电子地图格式中,公路或街道都是以实体的形式存储。线图元是以一组节点坐标(xi,yi)存储的,同一条道路相邻结点之间的连线近似为直线。节点坐标和道路名称分别保存在MIF和MID文件中。通过读取文件的操作,可以获取地图上数据点的信息。为此,定义如下的数据结构:
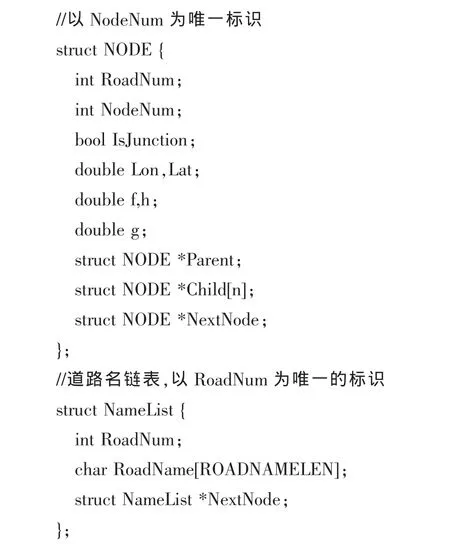
其中,RoadNum为道路编号,NodeNum为节点编号,IsJunction为布尔型变量,判断该节点是否为道路交点。Lon,Lat为节点的经纬度。Parent定义节点的父节点;Child[n]定义节点出度。
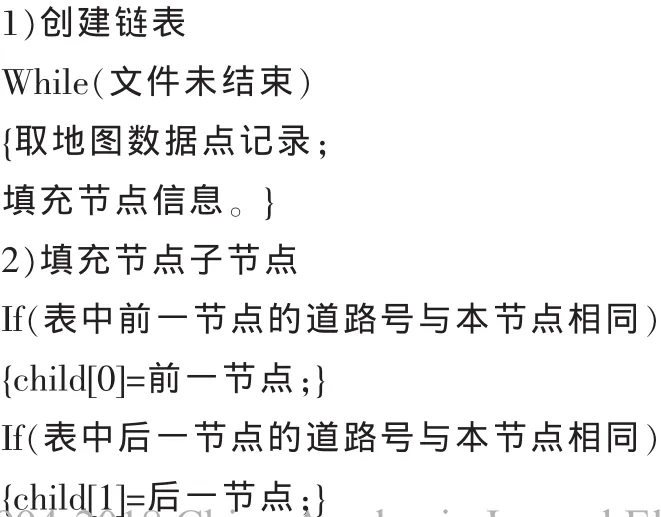
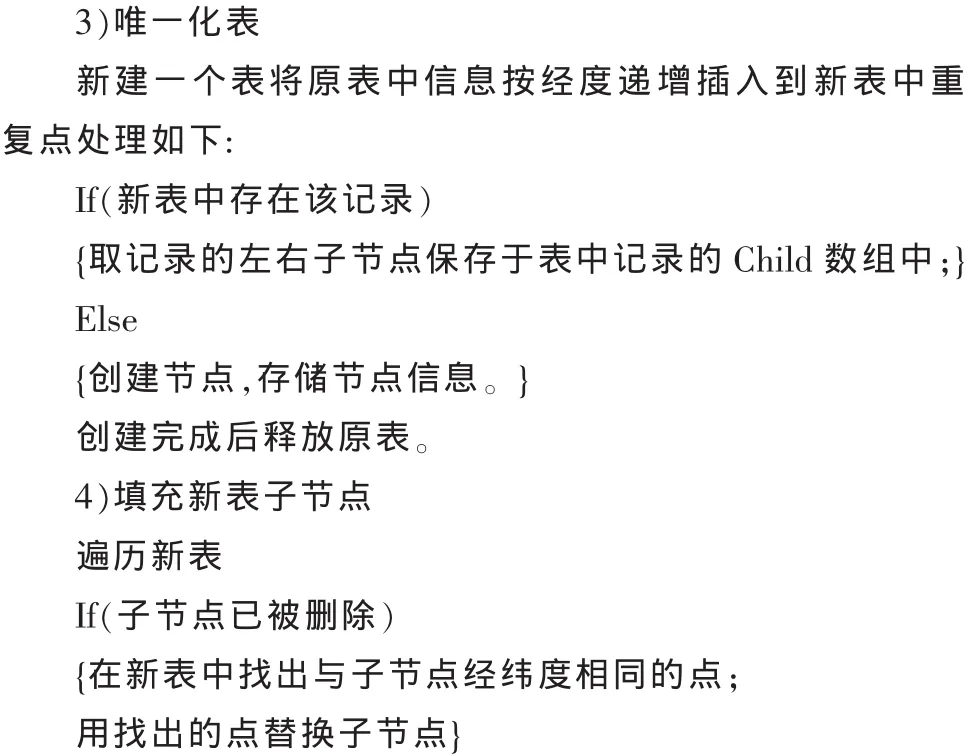
3.2 道路网预处理算法
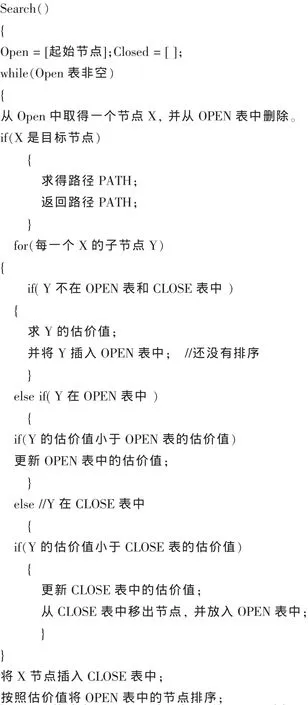
3.3 路径搜索算法
4 结果分析
由 A* 算法的基本因子 f(n)=g(n)+h(n),h(n)的信息性其实是在估计一个节点的值时的约束条件,如果信息越多或约束条件越多则排除的节点就越多,估价函数越好或说这个算法越好。选取适当的h(n)对结果影响很大。在广度优先算法中h(n)=0,没有任何启发信息。在对实时性要求较高的条件下,充分利用h(n)的信息性[5]是很重要的。采用A*算法,分别定义不同的g(n)和h(n)在西安市道路网中搜索出来的路径如图2所示。

图2 算法1~5搜索的结果Fig.2 Result of algorithm1~5
算法 1:g(n)为已经走过的代价,h(n)为当前点与终点间的距离;
算法 2:g(n)为走过的代价,h(n)=0;
算法 3:g(n)为节点深度,h(n)为当前点与终点间的距离;
算法 4:g(n)为节点深度,h(n)=0;
算法 5:g(n)=0,h(n)为当前点与终点间距离。
算法读取西安市部分地区道路网数据,总节点数为6 432,道路数为1 274,交点数为1 185,结果如表1所示。
算法2,4启发因子为0,耗费时间分别为12 506 ms和7 856 ms最多。h(n)的信息越少,它的计算量就越大,耗费的时间就越多。但算法2可以得到理论上最短路径。算法4目标路径中节点数最少,实际中即为道路的转折点最少。算法5只考虑启发因子耗费时间最少,搜索最快,但最终路径节点数也最多。算法1综合考虑了g和h,搜索节点数,目标路径节点数和耗费时间均属于中等。算法3综合考虑了节点深度和搜索当前点与目标点的距离。由结果可知,启发因子h对搜索算法的复杂度有很大的影响,如果信息越多或约束条件越多则排除的节点就越多,估价函数越好,搜索速度更快。

表1 5种不同启发因子的比较结果Tab.1 Comparison result of five different elicitation factors
5 结 论
实验结果表明,在嵌入系统有限的资源条件下,A*算法具有很好的稳定性和适应性。采用启发式搜索算法,选取不同的启发因子,对结果路径影响很大。根据不同领域对反应速度和路径距离的需求,设定不同的g和h值,可以得到所需要的结果。算法的计算量与地图的拓扑结构、起始点、终点和启发因子有关[6]。在选定了具体的道路网和起始点后,选取合适的g和h是至关重要的。
[1]许卓群.数据结构与算法 [M].北京:高等教育出版社,2004.
[2]张冬泉.Windows CE实用开发技术[M].北京:电子工业出版社,2006.
[3]王万良.人工智能及其应用[M].北京:高等教育出版社,2006.
[4]MapInfo Corporation.MapX mobile 5.05 developer guide[Z].MapInfo Corporation,2006.
[5]Fawcett J,Robinson P.Adaptive routing for road traffic[J].IEEE Computers Graphics and Applications,2000,20 (3):26-53.
[6]ZHAN F B.Three fastest shortest path algorithms on real road networks[J].Journal of Geographic Information and Decision Analysis,1997,1(1):69-82.
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
铁道通信信号(2020年10期)2020-02-07
测绘科学与工程(2017年5期)2017-05-07
电测与仪表(2015年15期)2015-04-12
中国教育技术装备(2015年21期)2015-03-11
河北科技大学学报(2015年5期)2015-03-11
中国工程咨询(2015年5期)2015-02-16
影像技术(2015年4期)2015-02-11
中央民族大学学报(自然科学版)(2014年1期)2014-06-11
测绘科学与工程(2014年4期)2014-02-27
