
基于自适应领域算法的智能照明控制系统
2010-05-28 05:43东华大学信息科学与技术学院上海201620
照明工程学报 2010年2期
(东华大学信息科学与技术学院,上海 201620)
1 引言
这些年,家用电器,汽车,飞机以及其他的很多系统变得越来越智能化,并且,这些系统的控制方式也更加的便于用户的操作,缓解了人们操作的负担[1]。
虽然现实世界中的系统变得越来越智能化,但是照明系统这个对人们不可或缺的系统控制来说,智能在其中的运用还不是很广泛,在国外许多楼宇中,智能照明已经开始应用,耗电量仅仅只有普通照明系统的20%~30%,在这些照明系统中,照明模式的设计远远比照明电路的设计更重要,也就是说,在室内的某处,让智能照明系统自动的调节到该处所需要的照度。最近,有许多的新的技术,它们利用天然光和电气照明节能技术实现了照明节能,比如,定时控制和光耦控制就是充分利用了光照达到了比较好的节能目的[2]。但这些方式还是有许多问题的,比如他们很难在室内的随意位置自动的给出合适的照度,或者说,在一个照明系统中,一旦有一个灯失效,其他的灯不能补偿这个灯失效之后的照度损失,另外,当系统中加入灯,照度传感器或者房间的格局改变时,以上所说的系统不能响应这些变化。
本文所介绍的系统解决了上述的问题,这是一种新型的智能照明节能系统,它可以控制照度,并且可以在任何地点提供相应的照度,本文还提出了新的智能照明控制算法:基于相关性系数的自适应邻域算法 (Adaptive Neighborhood Algorithm using Correlation Coefficient),该算法通过相关性系数获知照明设备的位置和照度传感器的信息,使得目标照度和节能条件这两个因素在较短时间内收敛。为此,我们还通过一些实验仿真来验证该算法的有效性。可是,该算法仍旧有两个问题,一个是在分布式的照度传感器上很难得到相对正确的照度。另外一个不可避免的现实问题是,当在大规模的照明系统中,一旦照度传感器发生变动,瞬态响应不太可能计算出相关性系数.
因此本文的研究解决了上述两个问题,我们又提出了一种新的智能照明技术,该技术叫做可视光通信技术,该技术在照明装置和照度传感器之间建立一个直接的通信,使得该系统能够快速的获知位置等信息。为此,我们还对上面所提的基于相关性系数的自适应邻域算法进行了改进。
2 智能照明系统
智能照明系统的结构。
该照明系统由各种智能的照明设备,各种可以移动的照度传感器和一个电能表组成,这些设备连成一个网络。所谓的智能照明设备,就是在这些设备上安装一个学习装置,使得每个设备可以单独自动的运作,通过在网络中传递的照度信息,单独的控制设备运用优化算法执行控制,达到最优控制。
我们目前所用的照明控制优化算法就是前面所讲的基于相关性系数的自适应领域算法,该方法融合了基于相关性系数机制的照明控制和常规目的优化算法“随机爬山法”[3],相关性系数的存在表明有两个或者更多的现象成为了一个集合并且同时变化。算法从光通量 (luminous influx)的变化和照度(illuminance)的变化来计算的,在该算法中,对于照明设备位置信息和照度传感器信息的合理性有助于达成目标照度和节能两大目标,在这两大目标领域中快速收敛。
图1表明了各个照明设备和照度传感器的距离以及各个照明设备之间的相关性系数,纵坐标表示各个灯之间相关性系数,从图表我们可以看出,传感器所检测到的照度值 (illuminance)与灯1的光通量值有很大的相关性,而灯2和灯3由于距离的关系,随着时间他们的相关性越来越趋向于稳定,且相关性较低。
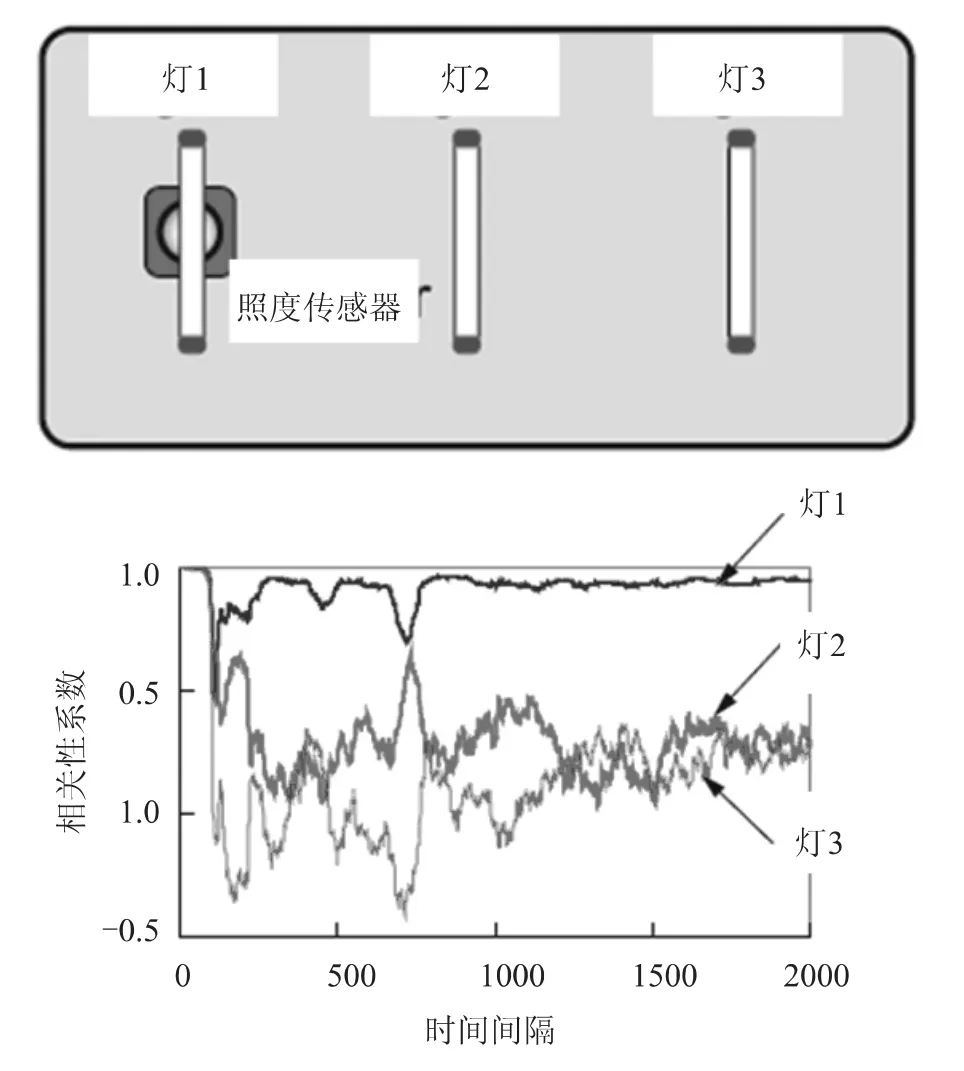
图1 灯光的亮度和环境照度之间的相关性
3 基于可视光通信技术的智能照明系统
3.1 可视光通信技术
最近,作为一种新的通信技术,可视光通信技术越来越吸引人们的目光,这种技术运用可视光来传导信息,是通过发光二极管 (LED)、荧光灯等光源的闪烁来实现数据收发的技术[4,5]。相比于传统的红外通信技术,该技术具有如下的特点:
(1)照明设备中用的电可直接用于通信,这样就可以用简单的设备建立起一个无线通信环境。
(2)由于照明是不受任何无线电法规限制的,所以在无线电波要求很严格的环境中也可以使用。
发射可视光的载体是可见的LED光,激光,有机电致发光,荧光灯等等,本文所用的可视光是由荧光灯发出来了。
3.2 基于可视光通信技术智能照明系统的组成
我们所提到的运用可视光通信技术的智能照明系统,主要是加快整个系统向预设的照度收敛,在该系统的灯具上的一个设备,用来向可视光中传输电信号,在照度传感器上的接收终端接收这些信号。图2为整个系统的结构。
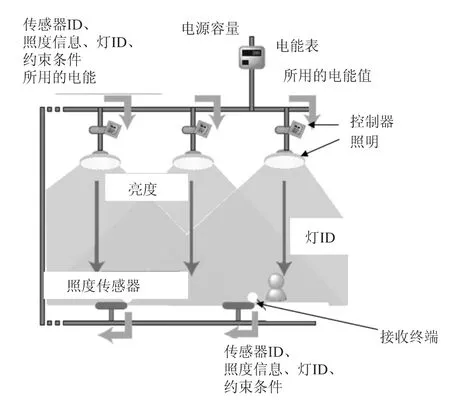
图2 基于可视光通信技术的智能照明系统结构
该系统中,每个灯都有一个 ID,这些ID会被调制成可视光信号,照度传感器会直接接收这些ID信号,因此每个灯的地点信息会被照度传感器所获知,与传统系统相比,这一过程几乎不用花费多少时间,因此系统能够较快的收敛到预置的照度。
3.3 可视光通信技术在智能照明系统中的运用
在本系统中,对于照明设备和照度传感器位置信息的获取和理解就是可视光通信技术在智能照明系统中的运用,目前有三种方法在智能照明系统中加入这种技术,第一种是仅仅运用可视光通信技术,这是在照明系统结构比较简单时运用比较有效,第二种是根据不同的情形,在系统中选择性的运用可视光通信或者运用基于相关性系数的自适应领域算法。第三种是结合两种技术,粗略的位置信息可以通过可视光技术获取,而详细具体的位置信息该算法得出。
3.4 控制算法
本文的控制算法就是上面我们所提到的结合可视光通信技术的基于相关性系数的自适应领域算法,该控制算法的主要目的就是获取照明设备和照度传感器的位置信息,它的流程框图如图3。
(1)初始参数如:初始亮度、目标照度等首先要被设定,每个灯初始的亮度是对应初始照度的。
(2)运用可视光通信技术传输灯ID。
(3)每个照明设备会得到每个照度传感器的信息 (照度传感器的ID,当前照度,目标照度及它所接收到的灯的ID)以及从电能表所传输过来的用电量,通过亮度和照度参数计算出相关性系数。
(4)计算一个目标函数的值。
(5)通过照度传感器的信息,决定一个合适的领域。
(6)下一个灯的亮度在这个领域中随机产生,灯在这个亮度下运行。
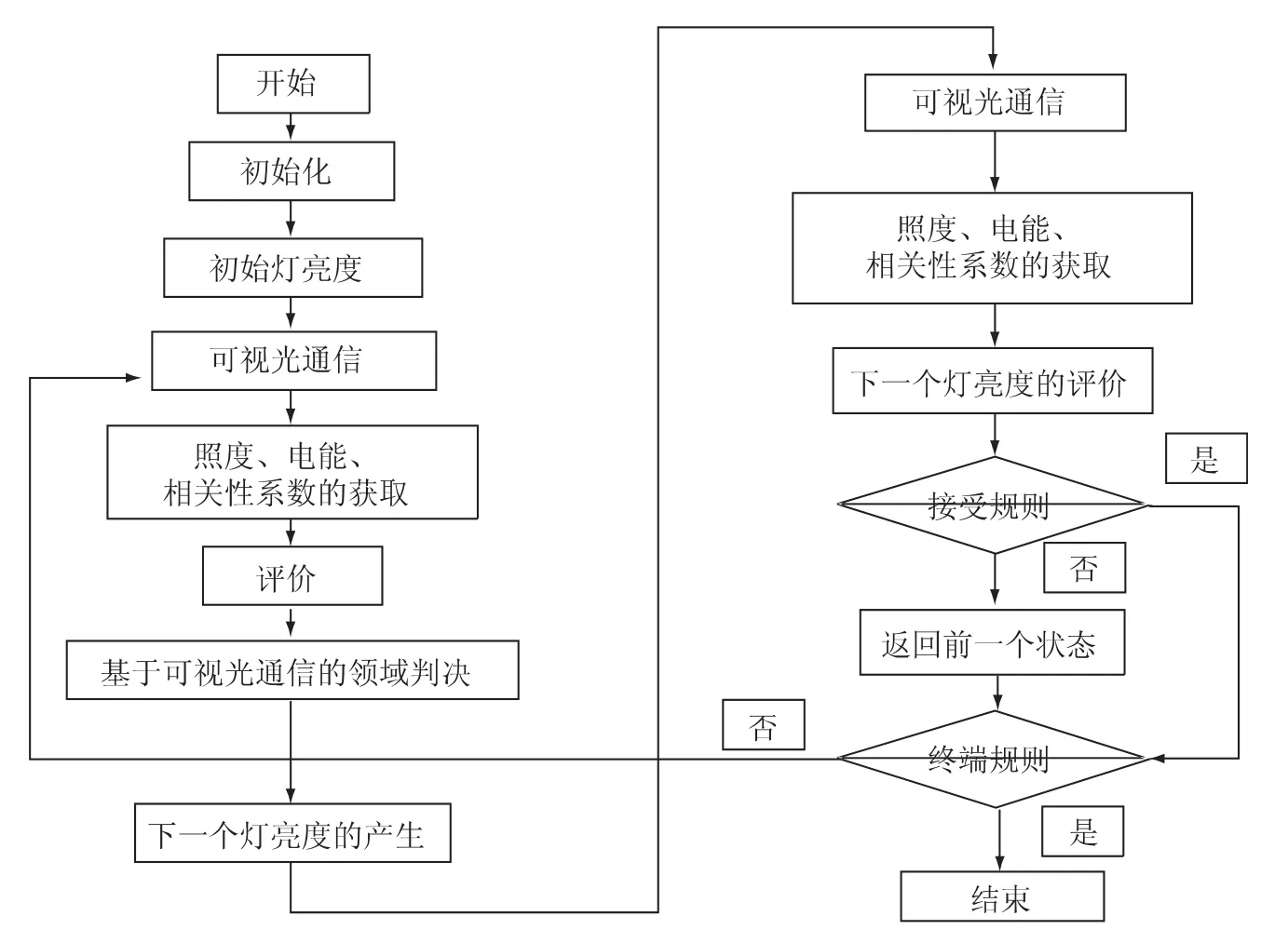
图3 运用可视光通信技术的基于相关性系数的自适应领域算法
(7)每个照明设备会得到每个照度传感器的信息 (照度传感器的ID,当前照度,目标照度以及它所接收到的灯的ID)以及从电能表所传输过来的用电量,通过新的亮度和新的照度参数计算出相关性系数。
(8)从新的照度值和用电量值中计算目标函数值。
(9)如果目标函数值得到了改进,此时就把对应的亮度确定下来,返回第二步。
(10)如果目标函数值并没有得到改进,那么灯亮度的变化就取消,返回到第二步。
通过上面的运行流程,可以使各个位置的照度收敛于目标照度,并且到达节能的状态,从上面的流程步骤我们可以看出,从 (9)(10)返回第二步的原因主要是环境因素的改变。
3.5 算法中的目标函数
自动照明控制的目标函数主要是将照度值接近与目标照度,并且将用电量降到最低。我们所提到的算法中,目标函数在式 (1)中体现,每个控制器都运用这个目标函数,整个系统的优化目标就是使该目标函数值最小化。
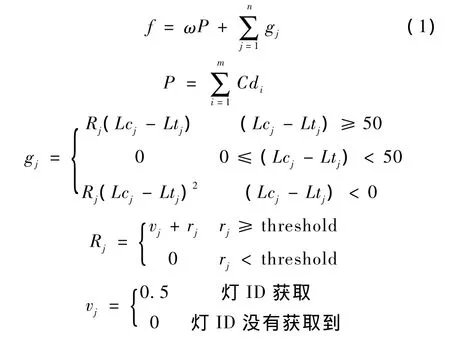
式中:n——照度传感器的数量
m——灯具的数量
ω——权重v:灯ID获得的状态
r—— 相关性系数
P——用电量
Lc——当前照度
Lt——目标照度
Cd——灯的亮度
该算法的目标函数如式 (1),目标函数的最主要目的就是使得所求的f值最小,主要有两个方面组成,一个是gj,表示的是当前照度与目标照度之差,P表示的是系统的用电量;在当前照度与目标照度之差gj为负数或者大于50流明时,该变量gj才会对目标函数值f起作用,从式 (3)我们也可以看出,一旦当前照度下跌到目标照度以下和超过目标照度很多,f会很快增加。亮度Cd的总和代表所用的电量P,因为灯的亮度与电量之间有典型线性关系。权重ω与P相乘,该权重代表的是在计算时对于目标照度优化还是用电量最小之间优先权的选择,v代表的是灯的ID的获得情况的描述,r等于0.5代表已经获取到,等于0代表没有获取到,该值对于系统对于单个灯的控制有很大的影响,它能够反应每个照度传感器的控制范围,r代表相关性系数,表明照度与灯亮度之间随时间变化规律。
3.6 领域判定方法
在基于可视光通信和相关性系数的自适应领域算法中,每个灯具的亮度是在给定的范围内随意选择的,该范围称为领域范围,如图四,该算法有三种领域范围,他们被用来产生下一个灯的亮度,图四表明各个领域与当前灯亮度之间的相对范围,在当前灯的亮度值上下两个相对范围是通过实验所估计出来的。从领域A来看,对于灯亮度的选择更多的倾向于当前亮度的下方,领域B则上下两个范围选取的概率相同,而领域C在当前亮度上方的选择下一个灯的亮度的概率更大。只有领域B被用在传统的优化算法 (随机爬山法)中。
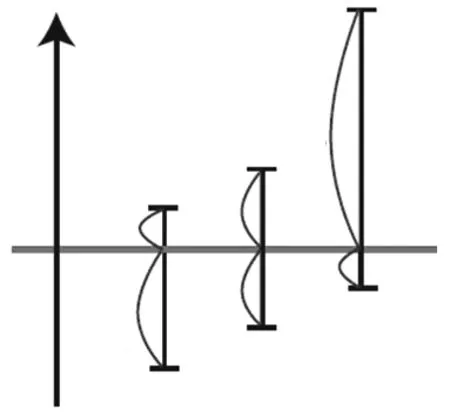
图4 三种领域范围
为了选择在哪一个领域范围内产生下一个灯的亮度,灯ID的获取情况就很重要了,它直接影响Rj这个系数,而Rj系数的大小则是三种领域范围的选择依据。如式 (2)该优化算法偶尔会在所选的领域范围内得到局部的最优解而不是全局最优解,因为该算法是基于随机爬山法所提出来的,但并不影响该算法的有效性,因为我们所设定的各个领域范围都是比较大的,所以该算法有很大的机会躲避局部最优解。就算得到了局部最优解,该值与全局最优解之间的差距也不会相差太多。

4 运用可视光通信技术和基于相关性系数的自适应领域算法实验
4.1 实验概要
该实验验证的智能照明控制系统是基于相关性系数的自适应领域算法的,而可视光通信技术在现实环境中还没有真正的运用,所以我们用计算机来仿真该技术,通过仿真的结果和理论结果之间相差不是很大。
该实验的试验参数在表1中,通过实验我们可以证明运用可见光通信技术的智能照明系统比仅仅使用基于相关性系数的自适应领域算法的系统在灯亮度的调节上更有效。图5描述了我们实验的环境。
4.2 可视光通信技术的覆盖范围
该技术条件下,基于灯亮度的可视光通信的覆盖范围变化是很大的,因为它只能接收到光所能照到范围内的数据,如图6,该图表明了大小两种覆盖范围的模式,以及两种模式下,灯亮度和覆盖范围的关系。
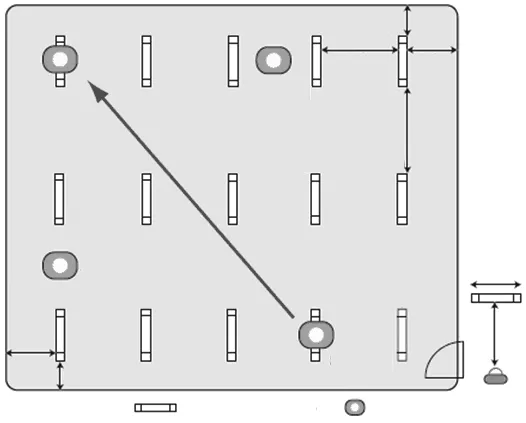
图5 实验环境
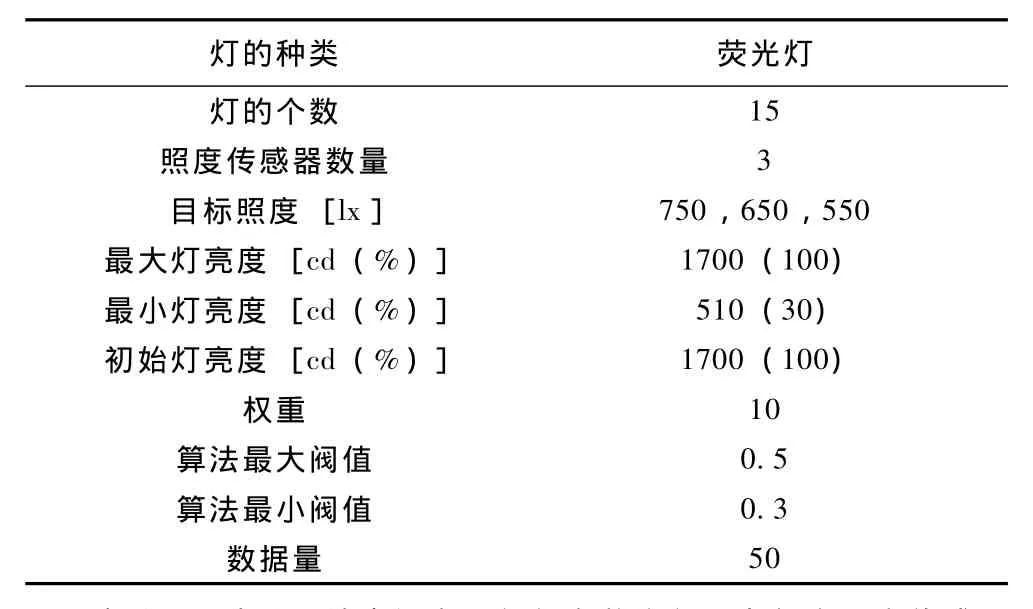
表1 实验参数
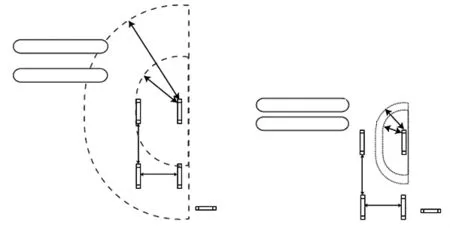
图6 可视光通信覆盖范围
由图我们可以看出,大模式的覆盖范围很广,因此就算在灯亮度很小的情况下 (30%的灯亮度),也能够接收到周围靠近的6个灯的ID。相应的,小模式在灯亮度在100%的时候也只能接收到周围4个灯的ID,在30%灯亮度的时候只能接收到2个灯的ID。实验一中,我们运用了两种模式的覆盖范围和前面我们提出的算法,都能够很好的实现通信,通过实验我们发现,当环境照度收敛到目标照度附近的时候,我们所提出的算法可以不受可视光通信覆盖范围的限制。
4.3 实验结果
(1)实验一,当运用可视光通信的大模式时,实验结果如图7,为了便于比较,我们还进行了仅仅用算法而不用可视光通信的实验,实验结果如图8。
图7 实验结果 (大模式)
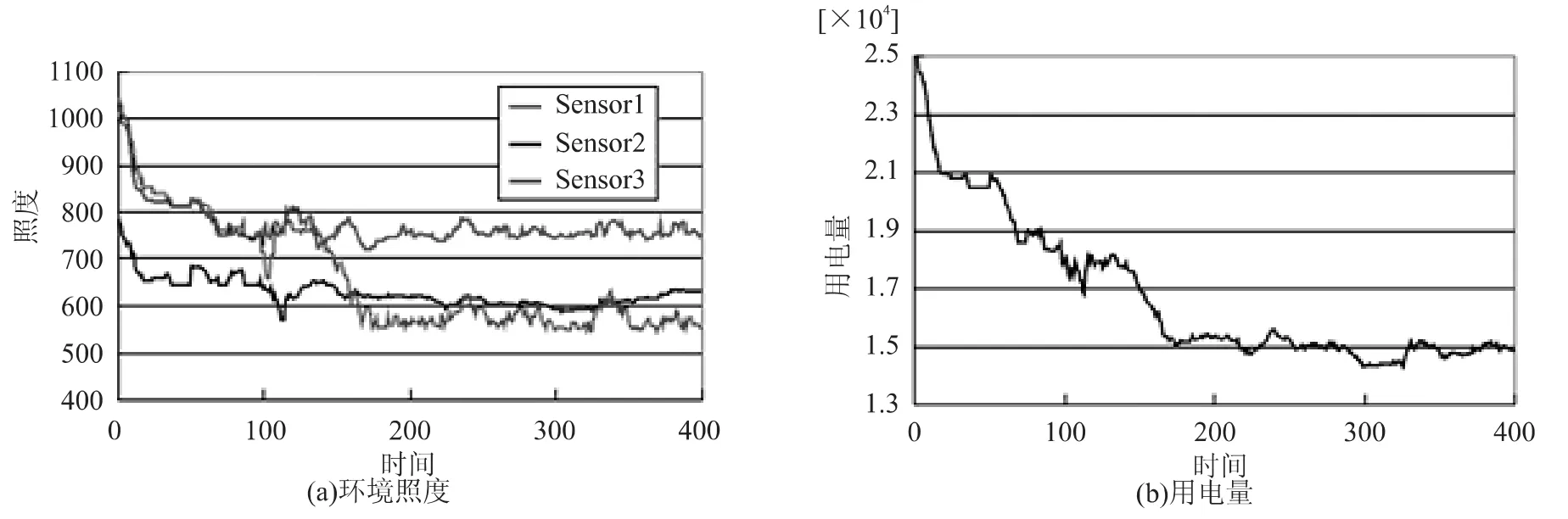
图8 实验结果 (仅用算法)
从图7的实验结果我们可以看出,三个照度传感器在时间在100附近的时候相继到达771,652和568[lx],都在他们所设定的目标照度值附近,此时我们可以看图7(b),用电量也在这时接近最小值。相比之下,图8在仅用算法的情况下,到达目标照度附近和最小用电量所用的时间较长。
(2)实验一,当运用可视光通信的小模式时,环境因素如图5和照度参数如表1,实验结果如图9。
(3)实验二,如图5所示,照度传感器3在时间为1000的时候 (如图10)从14号灯下方移动到1号灯下方,1号灯的下方环境照度远远小于目标照度值,所以,经过可视光通信技术和领域算法,在时间经过15之后,又收敛到目标照度。如图10(b)所示,对仅用算法的系统来说,需要经过55之后,该点的环境照度才能收敛到目标照度。收敛速度不如可视光技术的算法。
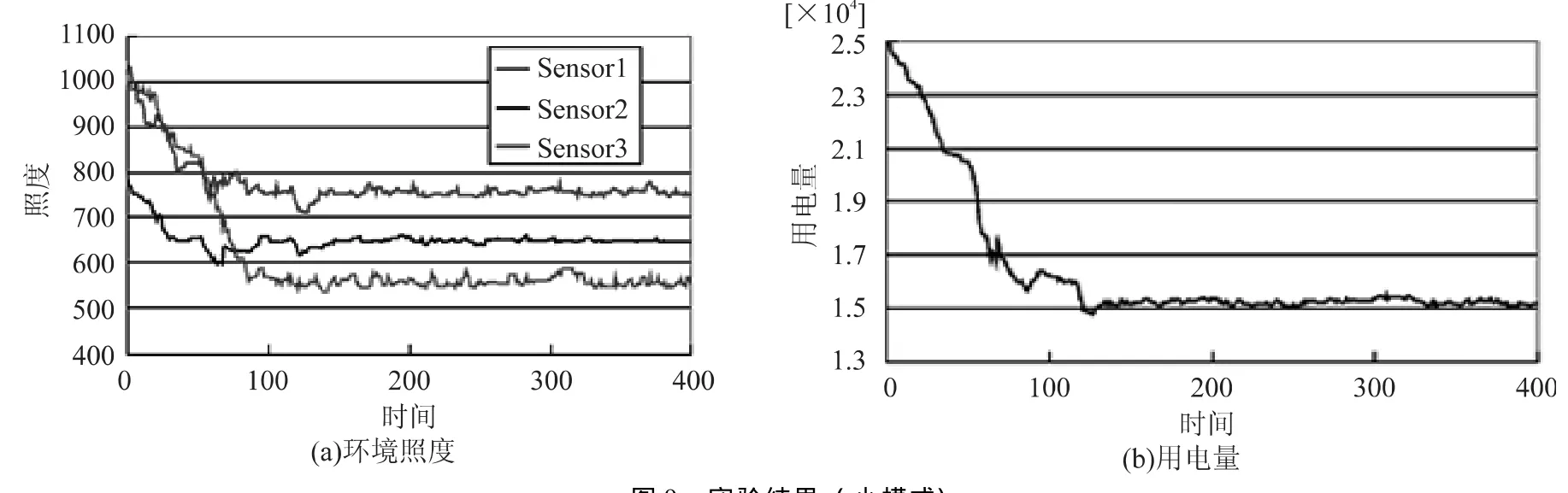
图9 实验结果 (小模式)
5 总结
本文所研究的智能照明系统紧扣当今社会节能环保这个主题,其智能主要体现在可以给室内任何一点随意的提供环境照度,并且所消耗的电能是该照度条件下最节省的。该系统运用了最新的控制方式,即基于相关性系数的自适应领域算法结合可视光通信技术。该方法可以加速灯光调节的时间,其有效性我们通过计算机仿真实验环境进行了验证。实验结果表明,该控制方式能够较快的促使整个系统进入节能状态,对于环境因素的改变响应速度较快。在智能照明系统领域有较好的推广作用。
[1]T.Kawaoka M.Miki.Design of intelligent artifacts:a fundamental aspects.Proc.JSME Inter-national Symposium on Optimization and Innova-tive Design(OPID97),1997
[2]Lighting controls.Int Light Rev,Vol.49,No.981,pp.48~49,1998
[3]Imazato K Miki M,Hiroyasu T.Proposal for an intelligent lighting system and verification of control method effectiveness.Proc IEEE CIS,pp.520~525,2004
[4]王秀锦,马剑,智能化照明,照明工程学报,2003.6,14(2):52~55
[5]王晓东,电气照明技术.北京:机械工业出版社,2004
猜你喜欢
家庭影院技术(2021年6期)2021-07-28
无线电工程(2020年9期)2020-08-31
河北省科学院学报(2020年4期)2020-03-19
摄影之友(影像视觉)(2019年3期)2019-03-30
照明工程学报(2018年3期)2018-08-03
照明工程学报(2017年3期)2017-07-10
小天使·六年级语数英综合(2017年5期)2017-05-27
空间控制技术与应用(2015年4期)2015-06-05
中国交通信息化(2015年5期)2015-06-05
浙江大学学报(工学版)(2015年1期)2015-03-01
