
闸门自动式锁锭设计
2010-04-28 10:31刘国军吴继彬
水利水电工程设计 2010年2期
刘国军 吴继彬
1 闸门锁锭型式概述
在闸门运行管理的过程中,由于启闭设备不宜长时间受力,当闸门需要较长时间锁在门槽内某个高程时,就需要用到锁锭装置。锁锭装置是将闸门固定在门槽或门库内某一个高程上的一种装置。在工程实际中,锁锭的型式多种多样,有抽拉式锁锭、走轮式锁锭、直角形翻转式锁锭、工字钢简支锁锭等等。每一种锁锭都有各自的特点,但这些锁锭都需要人工操作。
在实际的工程管理中,管理单位非常希望能够在操作设备的过程中节省甚至解放人力。如果在闸门启闭过程中,不需要人工去操作锁锭,那将会节省很多人力,也可以节约管理成本。
2 自动式锁锭介绍
在工程实践过程中,笔者接触到一种自动式锁锭,并对其进行了革新设计。这种锁锭的特点是在闸门锁定和解锁的整个过程中完全不需要人工操作,节省人力,非常方便。
2.1 自动式锁锭的基本型式
如图1所示,件1为摆叉,件2为轴套,件3为轴,件4为锁锭支座,件5为闸门上的锁定部位。状态1为摆叉工作时的状态,状态2为摆叉自由状态,摆叉可绕轴自由转动。摆叉关于轴对称两部分的重力矩应基本相等。自动式锁锭需在闸门两侧对称布置。锁定闸门时,闸门两侧锁锭的摆叉同时顶紧在闸门上的a处。锁锭支座需通过混凝土中的预埋螺栓和钢板固定牢固。
2.2 自动式锁定的工作过程
当闸门需要锁定时,闸门由启闭设备提起。此时锁锭装置的摆叉处于自由状态,如图1中状态2。闸门提升过程中带动摆叉绕锁锭轴转动,当闸门上a位置高于摆叉顶部时,由于摆叉关于轴对称两部分的重力矩基本相等,摆叉将回转至 a和b位置之间。此时将闸门往下放,摆叉可顶紧于 a处,即将闸门锁定。
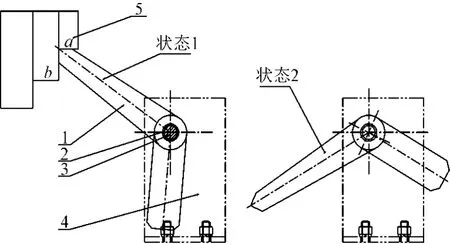
图1 自动式锁锭的基本型式
当闸门处于图1所示工作状态需要放下时,可先将闸门提起,直至 b位置高于摆叉。摆叉自由转动,可回复到状态2,如图1所示。此时闸门可以往下放,闸门推动摆叉转动,直至与摆叉脱离。摆叉自动回复到状态2。
以上即为闸门的锁定和解锁过程,从锁锭的整个工作过程可以看出,锁定闸门的操作完全不需要人工搬动锁锭,非常方便。
2.3 自动式锁锭的设计原理及设计过程中需注意的一些问题
自动式锁锭的设计依据为力矩平衡原理。锁锭前后的摆叉关于轴对称的重力矩基本相等。当摆叉处于不平衡状态时,由于重力矩作用,摆叉依靠自重可自动回复至状态2。
设计自动式锁锭存在如下一些需要特别注意的问题。
(1)摆叉的转动一定要灵活可靠,轴与摆叉之间需安装自润滑轴套。
(2)需防止摆叉过度翻转。首先确定摆叉的工作范围,要使它始终在处于工作范围以内,可以考虑在锁锭支座的钢板之间焊接钢管,防止其过度翻转。钢管的具体位置可视摆叉转动情况而定。
(3)当摆叉处于水平状态时,需保证摆叉不能与闸门干扰,间隙至少5mm,如图2所示。
(4)a位置与b位置在高度方向上需有一定的距离。a位置与b位置的距离不宜太小,距离较小会增加闸门起吊操控的难度。

图2 摆叉处于水平状态的情形
2.4 自动式锁锭综述
自动式锁锭的优点是显而易见的,设计原理简单,不需要人工操作,节省人力,尤其是在操作空间比较小或者不太安全的地方,更适合使用这种锁锭。它的缺点是锁定闸门的过程中对闸门的起吊行程有一定的要求,必须保证摆叉停留在a处和b处之间。
3 结 语
本文仅介绍了自动式锁锭的基本型式和原理。在工程实践中,不必拘泥于一种型式,可以根据其原理进行型式上的变换。例如,由于闸门之间的闸墩较窄,无法布置下2套锁锭,可考虑2套锁锭共用1个支座。为了节省空间,摆叉可交错布置,避免干扰。
总之,自动式锁锭有其非常明显的优点,完全解放了人力,可在工程实践中广泛应用。
猜你喜欢
英语文摘(2022年5期)2022-06-05
煤气与热力(2021年9期)2021-11-06
装备制造技术(2021年2期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
汽车与新动力(2019年5期)2019-11-07
海峡姐妹(2017年7期)2017-07-31
东方考古(2017年0期)2017-07-11
中国卫生(2016年12期)2016-11-23
新高考·高一数学(2016年3期)2016-05-19
IT时代周刊(2015年9期)2015-11-11
