
航测新技术在大比例地形图测绘中的应用与分析
2010-04-18 06:54杨静
城市勘测 2010年6期
杨静
(湖南省第一测绘院,湖南衡阳 421001)
航测新技术在大比例地形图测绘中的应用与分析
杨静∗
(湖南省第一测绘院,湖南衡阳 421001)
结合长沙星沙新城测区实例,介绍了利用IMU/DGPS辅助数码航空摄影测量技术进行内外业一体化测制数字化地形图的工艺流程,并对测绘成果进行了分析。
IMU/DGPS辅助数码;航空摄影测量;内外业一体化
1 引 言
IMU/DGPS辅助空中三角测量突破传统航空摄影测量需在测区实地逐一测量地面像控点的作业模式,仅需在航摄区域施测一个或几个基准站点和少量的对空地标点,利用安装在飞机上的GPS接收机与地面上一个或几个基准站点上的GPS接收机同步连续观测GPS卫星信号,连续采集GPS数据,同时获取航空摄影像片瞬间航摄仪快门开启脉冲,通过GPS载波相位测量差分定位技术,处理解算机载GPS轨迹,从而获取航摄仪曝光瞬间摄站的三维坐标,直接测定每张像片的6个外方位元素。这项技术应用于长沙星沙新城测区1∶1 000航测项目,其技术、经济指标优于预期,与传统航空摄影测量作业模式相比,外业地面控制的工作量大幅减少,作业效率极大提高,优势十分突出。
2 项目设计的基础与工艺特色
2.1 项目概况
测区位于长沙市星沙新城,属丘陵地貌,最低高程约28 m,最高高程约110 m,平均高程约50 m,摄区总面积414 km2。测量面积350 km2,航摄区范围如图1所示。
2.2 航摄种类
IMU/DGPS辅助数码航空摄影,使用UCXp数码航摄仪,镜头焦距为100.5 mm,CCD像幅尺寸为103.86 mm×67.86 mm(17 310像元×11 310像元),像元尺寸为6 μm。相对飞行高度为1 300 m,航摄比例尺1∶12 200,摄影地面分辨率0.078 m。水平能见度5 km,拍摄间隔6.5 s,航速180 km/h。航线敷设方向为东西方向,旁向重叠率按29%设计,航向重叠率按65%设计。定位定向设备使用APPLANIX POSAV510型高精度系统及TRACK′AIR飞行管理系统。

图1 长沙星沙新城航摄区范围示意图
2.3 IMU/DGPS基准站布设
DGPS工作的基本原理是利用参考站计算出误差或误差对定位结果的影响,供运动站修正自己的观测值或定位结果。DGPS工作模式如图2所示。

图2 DGPS工作模式示意图
为了通过差分处理GPS数据解算得到精确航摄飞行轨迹,飞行期间,利用GPS连续跟踪站进行同步数据观测,GPS连续跟踪站采样间隔设置为1 s。飞行完毕,及时下载及备份每个GPS基站的观测数据,并通过约定的传输方式发送至航摄处,以检查DGPS数据质量是否满足精度要求。
UCXp数字影像的预处理工作主要是采用UCXp配套软件对影像进行几何纠正、多波段配准、辐射纠正、影像融合(真彩色影像、彩色红外影像分别与全色波段的影像融合),将摄影得到的原始图像转换整合成标准的中心投影的数字图像。
2.4 控制点布设
(1)检校场控制点:位于检校场每条航线的第3、6、9张航片处各布设一个平高控制点。同时,在检校场内布设两个检查点以用于对检校场空三的精度进行检查。
(2)基准站坐标:提供GPS连续跟踪站的精确WGS-84坐标成果。
(3)精度验证区检查点:根据实际情况,在测区内选定精度较弱区域作为验证区,布设适当的控制点作为检查点,抑或利用已有的在该区域的控制点成果和其他成果作为精度验证检查点。
2.5 坐标转换
差分GPS解算基准是WGS-84坐标系,而测图所需坐标系为1980西安坐标系。因此,需对WGS-84成果进行坐标转换。转换方式有两种:
(1)由覆盖该区域的准确坐标转换七参数进行坐标转换;
(2)由覆盖该区域的最少5个控制点进行坐标转换,每个控制点有WGS-84和1980西安坐标系的两套坐标成果。
2.6 外方位元素解算
采用集成传感器定向方法进行外方位元素解算,IMU/DGPS数据处理的基本流程为:
(1)IMU/DGPS数据预处理;
(2)载波相位差分GPS测量解算,得到每个采样时刻的GPS准确坐标;
(3)引入DGPS结果,进行IMU/DGPS数据后处理;
(4)对检校场进行计算,得到相机安装时候的安装偏心角结果;
(5)利用安装偏心角结果和IMU/DGPS数据后处理得到的检校场外方位元素,进行系统检较得到系统差改正参数,对测区外方位元素进行改正;
(6)根据测区大小将测区进行加密分区划分,以加密分区为单元,将检校后的外方位元素作为带权观测值,同时引入加密分区四角控制点进行区域网联合平差,得到每张像片的高精度的外方位元素;
(7)利用上述解算得到的外方位元素进行前方交会,量测地物点物方坐标,与实测坐标比较,进行精度评定。
2.7 空三加密
(1)在进行像控点布设及测量之前,从测区中任选8航线14基线作为一个区域,先采用2航线进行像控点测量,采用静态GPS测量,高程采用2005年湖南省似大地水准面精化成果应用插值软件进行高程内插,高程系为1985国家高程基准,最后得到像控点平面坐标及正常高。
实验区像控点布设如图3。
图3 长沙星沙新城实验区像控点布设图
(2)通过采用自动空中三角测量软件Geolord-AT,进行各基线与各航线搭配的空三加密实验,自动空三加密实验结果显示,当采用6航线6基线时,经检测,航线航空摄影精度、数字化影像内定向、航线相对定向精度、测区多项式整体平差精度、测区光束法整体平差精度、各模型绝对定向残差、测区加密点大地坐标较差及每个区域网接边精度均达到了《1∶500、1∶1 000、1∶2 000地形图航空摄影测量内业规范》的要求。
2.8 “内外业一体化”成图
(1)利用GPS辅助航空摄影时获取的航空像片影像数据,采用Geolord-AT空中三角测量软件,导人摄站的外方位元素、其他参数及控制点的平面坐标和高程,完成框标量测自动内定向、加密点自动匹配、旁向连接点自动转点、加密点和地面控制点输入定位,人工选刺观测、自动相对定向模型连接、多项式区域网整体平差、光束法区域网整体平差计算测区加密点平面坐标及高程,得到这16个加密分区的空三加密成果。
(2)利用一体化地理信息影像综合判调软件Geo-MapUpdate V3.0测制数字化地形图。
3 成果的技术、经济指标分析
3.1 自动空三加密实验精度数据(如表1所示)

自动空三加密实验精度数据表(单位/m) 表1
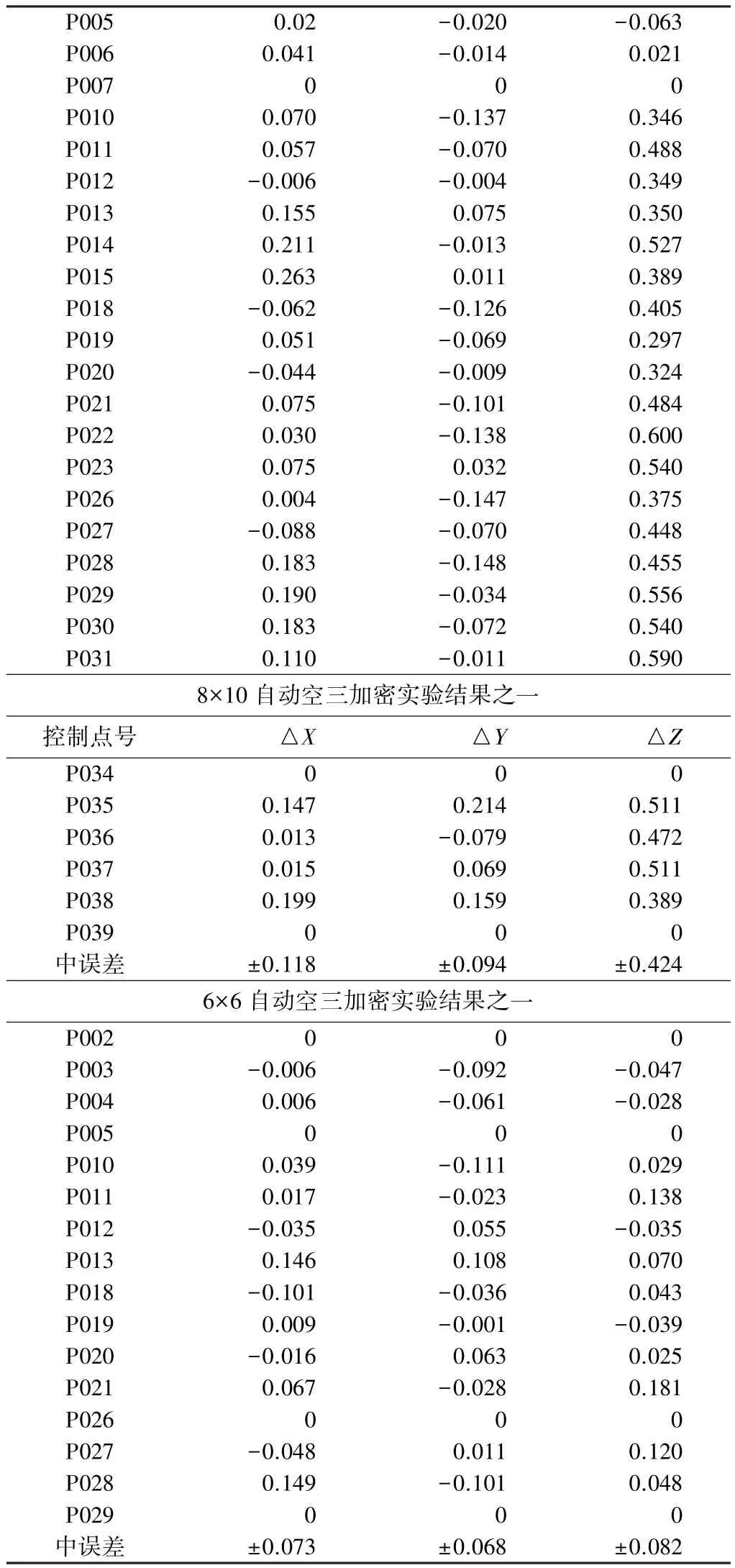
注:单位为m,P002 P007,P034,P039,P002,P005,P026,P029为已知点,其他点为检查点。
由表1比较得知,当采用8×10自动空三加密实验其高程精度达不到规范要求,而采用6×6自动空三加密实验结果显示,其平面及高程精度均优于规范要求。
通过实验比较,采用6×6方案进行整个星沙新城测区布像控点,因测区不规则,共布设包括实验区40个点在内共130个像控点。航摄区空三加密分为16个加密分区,面积约350 km2。
3.2 成品图野外检测精度统计结果
成品图经野外实地检测,地物、地貌点精度统计如表2所示。
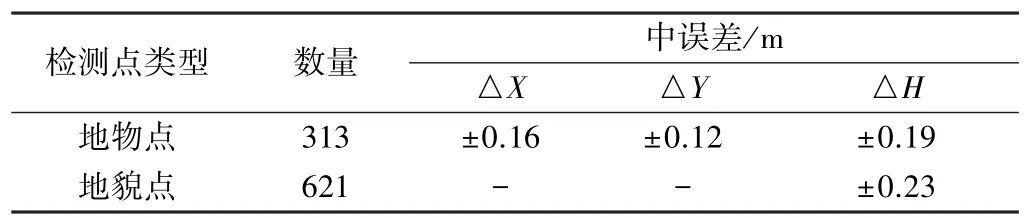
点位精度统计结果 表2
3.3 作业效率与经济效果
长沙星沙新城航测项目采用IMU/DGPS辅助数码航测技术及“内外业一体化”成图,总计用时约90天,与传统航测、全野外数字化测绘比较,内外业工作量减轻、减少,特别是外业工作大量压缩,人、财、物配置得到充分合理优化,工作效率、项目利润较大幅度提升。
4 结 语
采用IMU/DGPS辅助数码航测新技术,工艺流程自动化程度高,工作量较大幅度减少,成图周期短,生产成本低,测绘成果精度好,在未来测绘领域具有广阔的应用前景。
[1] 袁修孝.GPS辅助空中三角测量原理及应用.北京:测绘出版社.2001
[2] 李学友.IMU/DGPS辅助航空摄影测量综述.测绘科学,2005,5(30):110~113
[3] 袁修孝.当代航空摄影测量加密的几种方法[J].武汉大学学报,2007(11):1001~1006
Application and Analysis on Aerial Survey of New Technology in Large Scale Topographic Mapping
Yang Jing
(The First Surveying and Mapping Institute of Hunan Province,Hengyang 421001,China)
Combined with changsha city star sand,the surveyed area using IMU/DGPS supplemental aerial photogrammetry digital technology integration process CeZhi digital topographic surveying and mapping results,and analyzed.
IMU/DGPS supplemental digital;Aerial photogrammetry;The integration
1672-8262(2010)06-79-03
P231
B
2010—05—18
杨静(1967—),男,工程师,主要从事信息化测绘技术与GIS应用、摄影测量与遥感等工作。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
幼儿园(2021年12期)2021-11-06
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
航空知识(2019年1期)2019-01-11
测绘通报(2018年10期)2018-11-02
环球飞行(2018年7期)2018-06-27
中国修辞(2016年0期)2016-03-20
中国房地产业(2016年9期)2016-03-01
火控雷达技术(2016年2期)2016-02-06
