
基于遭遇点预测的比例导引与多平台接力制导交接律设计
2010-03-24 02:40:20余名哲张友安
海军航空大学学报 2010年3期
余名哲,张友安,钱 进
(1.海军航空工程学院 控制工程系,山东 烟台 264001;2.95737 部队,重庆 402361)
为提高舰艇编队的中远程反导能力,实现区域防空的要求,需要舰空导弹具备超视距多平台协同制导能力。
在有较大误差的情况下,综合各方面因素考虑,选取了对遭遇点的攻击方式。这种攻击方式目前文献中并不多见,以往的遭遇点预测一般是根据导弹常用的视线法和比例导引法[1-2]解算导弹的运动学弹道来预测瞬时遭遇点的坐标。本文利用导弹、目标和遭遇点三方距离关系,按传统比例导引解算的待飞时间[3-4]直接解算导弹对遭遇点的导引律。
为了实现不同平台对超视距舰空导弹的协同制导,在导弹飞行过程中,相邻平台需要对导弹完成接力制导。在制导接力过程中,由于各平台所提供的目标、导弹信息有所不同,因此各平台的制导指令在交接点处发生突变。为实现弹道及制导指令的平滑过渡,需要设计交接律[5-6]。
1 基于遭遇点预测的比例导引律设计
根据导弹与目标的当前状态,实时预测遭遇点。假设目标由当前时刻恒速运动到达遭遇点,导弹采用传统比例导引[7]的方式到达遭遇点。当前时刻预测的相对运动关系如图1所示。图中,M表示导弹,T表示目标,T'表示预测遭遇点,R表示弹目距离,R '表示导弹到遭遇点的距离,L表示目标到遭遇点的距离,q表示目标视线角,q'表示遭遇点的视线角,设ox轴正向逆时针转向为正。
图1 导弹、目标和预测遭遇点的相对运动关系
导弹对遭遇点进行比例导引,制导指令为

制导指令的解算,需要用到遭遇点的信息。下面根据遭遇点的预测方法,推导所需的遭遇点信息。
由导弹与遭遇点的相对运动关系,有

遭遇点 T'的坐标可以表示为

遭遇点的视线角 q' 具有关系
类似的目标视线角也有如下关系:

将式(3)代入到式(4),可得
将式(6)代入到下式

整理后可得

式中:
导弹到达遭遇点按照传统比例导引解算的待飞时间为

则导弹与目标同时到达遭遇点,须满足

式(10)的左侧表示目标到达遭遇点的时间,右侧为导弹按照传统比例导引到达遭遇点的时间,相当于导弹在当前时刻对固定点 T'的比例导引剩余时间估计。
对于导弹、目标与遭遇点所构成的三角形,由余弦定理有

联立式(8)、(10)、(11)可得

式(12)为仅含未知量L的一元四次方程,可实时求得数值解(摒弃不合理的解)。将所得的L代入式(10)可得 R'。这样,将所得的R'代入式(8),并将所得结果代入式(2),最终可得制导所需的信息 q˙'。
一元四次方程的算法[7-8]可以利用待定系数法将一元四次方程化为两个二次方程的乘积,通过解两个二次方程达到四次方程的求解目标。
综上,对遭遇点的制导指令所需信息为vM、Tv、Mθ、Tθ、R 与q。目标位于视距外,R 与q 不能直接获得,但可由制导平台所提供的目标与导弹坐标经式(13)计算得出,其余量均由制导平台直接提供。
2 多平台接力制导的交接律设计
导弹发射后,首先由发射平台制导,导弹逐渐飞离发射平台后,“制导权”交由距导弹较近的协同制导平台实施,如需要,这种“制导权”的传递将继续向下一协同制导平台进行。网络中的协同制导平台可以是空中平台也可以是水面平台,如图2所示。
设第i个协同制导平台提供的导弹坐标为(xM,yM),导弹速度为vM,弹道倾角为θM;目标坐标为(xT,yT),目标速度为vT,目标弹道倾角为θT。
由于信息来源不同、数据传输过程中存在延迟及丢包等因素,各制导平台对导弹制导过程中所提供的制导信息有所不同。
设第i+1个制导平台所提供的信息相比第i个平台有一增量,导弹坐标为(xM+∆xM,yM+∆yM),导弹速度为vM+∆vM,弹道倾角为θM+∆θM,目标坐标为(xT+∆xT,yT+∆xT),目标速度为vT+∆vT,目标弹道倾角为θT+∆θT。
根据第i个平台与第i+1个平台提供的目标与导弹的信息,在各突变信息[9]中引进平滑因子α。
在交接过程中,制导指令解算时所需要的导弹坐标取为(xM+ α∆ xM,yM+ α∆yM),导弹速度为vM+ α∆vM,弹道倾角为θM+ α ∆θM,目标坐标为(xT+ α∆ xT,yT+ α∆ yT),目标速度为vT+ α∆ vT,弹道倾角为θT+ α ∆θT。
当导弹由第i个平台的制导区飞向第i+1个平台的制导区时,导弹完成制导权的交接。交接条件:

式中:Pi1+表示导弹与第i+1个平台的距离;ip表示表示导弹与第i个平台的距离;0p为阈值。
平滑因子α可取为时间的函数,也可取为距离的函数,这里考虑是时间函数的情况。设交接起始时刻为t0,交接时间为T,则可设计平滑因子为:

式中:t ∈ [t0,t0+ T]。
显然,当t=t0时,制导指令的解算按照第i个平台所提供的目标与导弹信息进行。
从t=t0开始,经时间T,在t=t0+T时实现制导指令的顺利过渡,其解算最终按照第i+1个平台所提供的信息进行。这种交接方式可以实现在规定的时间内完成弹道的平滑过渡,并在交接的初始时刻和结束时刻也能保证制导指令的平滑性。
3 仿真结果与分析
导弹初始位置 (xM,yM)为(1 000 m,20 000 m),初始弹道倾角 θM=30°,速度 VM为800 m/s;目标初始位置 (xT,yT)为(120 000 m,1 000 m),弹道倾角 θT=10°,以400 m/s的速度飞行。平台交接时给定T=10s,p0=100,比例导引系数N=5。
仿真结果如图3~6所示,图6中不采用交接律的情况为测量的弹目轨迹。
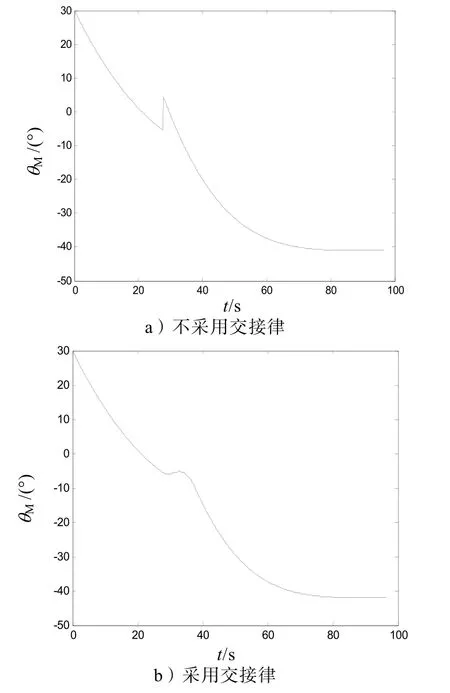
图3 弹道倾角Mθ仿真曲线

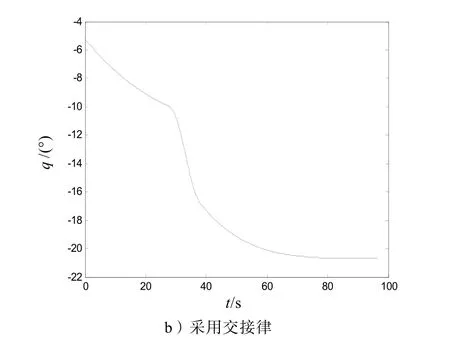
图4 弹目视线角q仿真曲线

图5 导引指令 aMn仿真曲线
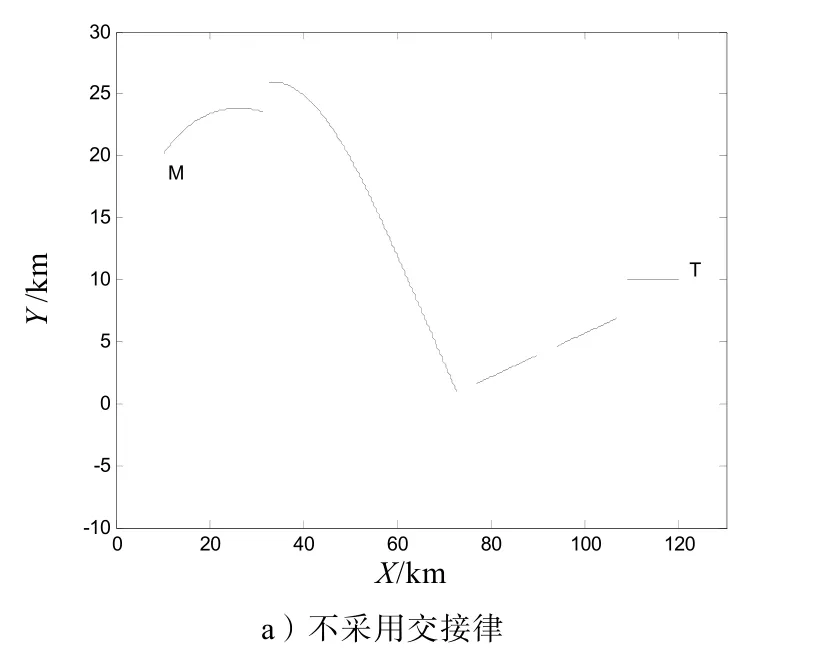

图6 弹道轨迹仿真曲线
4 结束语
舰空导弹在空间中的制导过程在本文中把它分解到水平面内进行了分析。采用多平台协同制导将扩大舰艇编队防空区域,增加对空中来袭目标的拦截次数和拦截概率。本文设计的基于遭遇点攻击的平台交接率是有效的。今后对于平台接力制导还有必要进行更深入的研究。
[1]王君,周林,雷虎民.地空导弹与空中目标遭遇点预测模型和算法[J].系统仿真学报,2009,21(1):80-83.
[2]一辉.当今俄罗斯主力舰艇防空导弹系统与集成方式解析[J].现代兵器,2008(1):6-11.
[3]马国欣.多导弹时间协同制导方法研究[D].烟台:海军航空工程学院,2008.
[4]MIN-JEA TAHK,CHANG-KYUNG RYOO,HANG-JU CHO.Recursive time-to-go estimation for homing guidance missiles[J].IEEE Transaction on Aerospace and Electronic Systems,2002,38(1):13-24.
[5]张友根,张友安,施建洪,等.基于双圆弧原理的协同制导律研究[J].海军航空工程学院学报,2009,24(5):537-542.
[6]刘兴堂.导弹制导控制系统分析、设计与仿真[M].西安:西北工业大学出版社,2005.
[7]樊正恩.一元四次方程的一种新解法[J].数学学习与研究:教研版,2009(4):93-96
[8]智海章.一元四次方程的一种解法探讨[J].数学教学,1988(5):2-3.
[9]张建伟,黄树彩,韩朝超.基于Matlab的比例导引弹道仿真分析[J].战术导弹技术,2009,21(3):60-64.
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
电子制作(2019年7期)2019-04-25 13:17:48
创新作文(小学版)(2018年13期)2018-11-22 06:36:46
新高考(英语进阶)(2017年9期)2017-11-07 02:42:51
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
制导与引信(2016年3期)2016-03-20 16:02:02
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
太空探索(2014年1期)2014-07-10 13:41:49
